一種具有智能控制系統的模塊化直線型工作臺的制作方法
本發明涉及一種具有智能控制系統的模塊化直線型工作臺,更具體一點說,涉及一種具有智能控制系統的模塊化直線型工作臺,屬于自動化與機器人領域。
背景技術:
1、隨著現代工業的快速發展,自動化和智能化已成為制造業的關鍵趨勢。在生產線上,提高生產效率、降低成本、提升產品質量和增強靈活性是企業追求的主要目標。傳統的工作臺和機械臂系統雖然在一定程度上實現了自動化,但仍存在一些局限性,如缺乏靈活性、效率不高、操作復雜等。機械臂的運動范圍和精度受限,難以滿足高精度和復雜操作的要求。
2、多數自動化系統缺乏智能化的監控和調整能力,導致生產效率和產品質量不穩定。而高級算法和數據分析可以進一步提高系統的預測能力和決策效率。直線型工作臺提供了一種高效的物料搬運和加工方式,適合于需要連續作業的生產線。
3、本發明正是在上述技術背景和市場需求的基礎上,提出了一種具有智能控制系統的模塊化直線型工作臺,旨在解決現有技術中的局限性,提供一種高效、靈活、智能的自動化生產解決方案。
技術實現思路
1、本發明的目的在于提供一種具有智能控制系統的模塊化直線型工作臺,旨在解決上述功能上的不足,提高生產線的自動化水平和生產效率。
2、為了實現上述目的,本發明是通過以下技術方案實現的:
3、本發明一種具有智能控制系統的模塊化直線型工作臺,包括設備架構以及系統架構,所述設備架構包括連接在機架上的直線型工作平臺,所述直線型工作平臺兩側分別安裝有一個能夠沿著直線型工作平臺左右移動的機器人地軌,所述機器人地軌上面連接有軸且帶有抓手的機械臂,所述機械臂的上至少連接有一個工業相機、usb相機、監控相機;
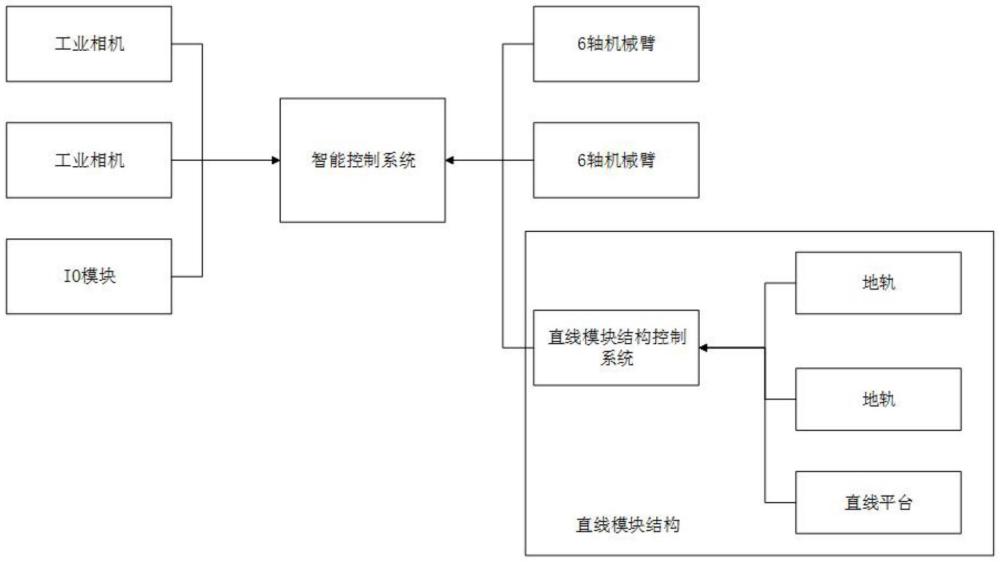
4、所述系統架構包括智能控制系統以及與智能控制系統通信連接的直線模塊結構控制系統;
5、所述智能控制系統通過網口與相機、機械臂、直線模塊結構控制系統連接;所述直線模塊結構控制系統通過網口與機器人地軌、直線型工作平臺通信連接。
6、優選的,直線模塊結構控制系統包括包括處理器以及與處理器連接的嵌入式觸摸屏、plc,所述所述plc通過網口與智能控制系統連接,所述嵌入式觸摸屏通過串口與plc連接,所述plc通過網口分別與機器人地軌、直線型工作平臺通信連接。
7、優選的,所述智能控制系統包括中央處理器以及與中央處理器連接的設備接口模塊、圖像處理模塊、顯示模塊、操流程作模塊、策略編輯器、消息收發模塊、文件操作模塊、支持多線程模塊;
8、設備接口模塊連接有工業相機、usb相機、監控相機、機械臂、plc以及外設通訊設備;圖像處理模塊包括電性連接的圖像處理芯片、圖像存儲器、相機校準模塊、圖像數據接口、圖像處理加速卡,圖像處理模塊用于實現經典處理方式、深度學習方式、支持第三方圖像處理機機口、相機校準;顯示模塊包括電性連接的高清顯示屏、顯示屏控制器、顯示存儲器,顯示模塊用于實現的是圖像顯示、標題顯示、表格顯示;操流程作模塊包括電性連接的操作按鈕和開關、操作邏輯控制器、狀態指示燈,操流程作模塊用于實現的是開始、終止、跳轉、計數、n選1、延時;消息收發模塊包括電性連接的網絡接口卡、串行通信接口、消息隊列管理器、加密模塊,操流程作模塊用于實現的是打開接口、關閉接口、發送數據、接收消息;文件操作模塊包括電性連接的存儲設備、文件系統管理器,文件操作模塊用于實現的是單文件讀取操作、單文件寫入操作、批量文件讀取。
9、優選的,所述機器人地軌包括滑座臺,所述滑座臺上設有由一號電機驅動的滾珠絲桿,所述滑座臺上連接有與滾珠絲桿平行的導軌,所述滾珠絲桿上螺紋連接有滑塊,且所述滑塊可滑動的安裝在導軌上,所述滑塊與機械樁連接板螺釘連接,所述機械臂安裝在機械樁連接板上;所述一號電機與直線模塊結構控制系統中的處理器通信連接。
10、優選的,所述直線型工作平臺包括與直線模塊結構控制系統中的處理器通信連接伺服電機、一號同步帶輪、二號同步帶輪,所述伺服電機通過聯軸器連接一號同步帶輪,所述一號同步帶輪、二號同步帶輪間通過同步帶相連;所述一號同步帶輪連接有主滾輥,所述主動滾輥通過傳送帶連接有副滾輥,通過伺服電機驅動傳送帶實現帶動待加工或待裝配的物品沿直線軌跡運動。
11、優選的,所述傳送帶內設有張緊機構,所述張緊機構包括直徑逐漸變大的螺桿且由螺桿二號電機驅動,所述二號電機與直線模塊結構控制系統中的處理器通信連接,所述螺桿可轉動的安裝在機架上,所述螺桿上螺紋連接有軸承座,所述軸承座可滑動的安裝在機架上的軌道上且軌道與滾輥平行,所述軸承座上設有軸承,通過旋轉螺桿,從而改變軸承頂住傳送帶的力度從而實現改變傳送帶在滾輥上的包角,達到調整松緊的目的。
12、優選的,所述機械臂上能夠安裝多種末端執行器以適應不同的加工和裝配需求;所述末端執行器包括夾具、焊槍、吸盤。
13、優選的,所述機械臂的軸均設有機械臂伺服電機和減速器以實現精確的位置控制和速度調節,所述機械臂伺服電機和減速器均與中央處理器通信連接。
14、優選的,所述智能控制系統還包括執行機構控制模塊以及由若干個傳感器組成的傳感器網絡,中央控制單元負責接收來自傳感器網絡以及各相機的實時數據,進行數據處理和分析,并發出控制指令給執行機構控制模塊,所述執行機構控制模塊控制減速器、各電機以及末端執行器工作。
15、優選的,所述傳感器包括位置傳感器、力傳感器、視覺傳感器,以用于實時監測工作臺和機械臂的狀態及工作環境。
16、有益效果:本發明能夠實監控和調整機械臂及工作臺的操作,優化生產流程,提升自動化水平。通過配備兩臺機械臂,本發明能夠實現多任務并行處理,顯著提高生產效率。智能控制系統的加入,使得工作臺能夠適應不同生產需求,實現自動化、智能化的生產操作。
17、本發明的模塊化設計使得工作臺可以根據具體應用場景快速調整和重新配置,具有高度的靈活性和適應性。因此,本發明不僅適用于自動化生產線,還適用于工業制造、物流搬運等多個領域,有效提高生產效率,降低人工成本,推動產業智能化發展。
技術特征:
1.一種具有智能控制系統的模塊化直線型工作臺,其特征在于:包括設備架構以及系統架構,所述設備架構包括連接在機架上的直線型工作平臺(2),所述直線型工作平臺(2)兩側分別安裝有一個能夠沿著直線型工作平臺(2)左右移動的機器人地軌(1),所述機器人地軌(1)上面連接有6軸且帶有抓手的機械臂,所述機械臂的上至少連接有一個工業相機、usb相機、監控相機;
2.根據權利要求1所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:直線模塊結構控制系統包括包括處理器以及與處理器連接的嵌入式觸摸屏、plc,所述plc通過網口與智能控制系統連接,所述嵌入式觸摸屏通過串口與plc連接,所述plc通過網口分別與機器人地軌(1)、直線型工作平臺(2)通信連接。
3.根據權利要求2所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述智能控制系統包括中央處理器以及與中央處理器連接的設備接口模塊、圖像處理模塊、顯示模塊、操流程作模塊、策略編輯器、消息收發模塊、文件操作模塊、支持多線程模塊;
4.根據權利要求1或2所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述機器人地軌(1)包括滑座臺,所述滑座臺上設有由一號電機驅動的滾珠絲桿,所述滑座臺上連接有與滾珠絲桿平行的導軌,所述滾珠絲桿上螺紋連接有滑塊,且所述滑塊可滑動的安裝在導軌上,所述滑塊與機械樁連接板(13)螺釘連接,所述機械臂安裝在機械樁連接板(13)上;所述一號電機與直線模塊結構控制系統中的處理器通信連接。
5.根據權利要求1所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述直線型工作平臺(2)包括與直線模塊結構控制系統中的處理器通信連接伺服電機、一號同步帶輪(21)、二號同步帶輪(22),所述伺服電機通過聯軸器連接一號同步帶輪(21),所述一號同步帶輪(21)、二號同步帶輪(22)間通過同步帶相連;所述一號同步帶輪(21)連接有主滾輥,所述主動滾輥通過傳送帶連接有副滾輥,通過伺服電機驅動傳送帶實現帶動待加工或待裝配的物品沿直線軌跡運動。
6.根據權利要求1所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述傳送帶內設有張緊機構(23),所述張緊機構(23)包括直徑逐漸變大的螺桿(24)且由螺桿(24)二號電機驅動,所述二號電機與直線模塊結構控制系統中的處理器通信連接,所述螺桿(24)可轉動的安裝在機架上,所述螺桿(24)上螺紋連接有軸承座,所述軸承座可滑動的安裝在機架上的軌道上且軌道與滾輥平行,所述軸承座上設有軸承,通過旋轉螺桿(24),從而改變軸承頂住傳送帶的力度從而實現改變傳送帶在滾輥上的包角,達到調整松緊的目的。
7.根據權利要求3所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述機械臂上能夠安裝多種末端執行器以適應不同的加工和裝配需求;所述末端執行器包括夾具、焊槍、吸盤。
8.根據權利要求7所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述機械臂的6軸均設有機械臂伺服電機和減速器以實現精確的位置控制和速度調節,所述機械臂伺服電機和減速器均與中央處理器通信連接。
9.根據權利要求8所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述智能控制系統還包括執行機構控制模塊以及由若干個傳感器組成的傳感器網絡,中央控制單元負責接收來自傳感器網絡以及各相機的實時數據,進行數據處理和分析,并發出控制指令給執行機構控制模塊,所述執行機構控制模塊控制減速器、各電機以及末端執行器工作。
10.根據權利要求9所述的一種具有智能控制系統的模塊化直線型工作臺,其特征在于:所述傳感器包括位置傳感器、力傳感器、視覺傳感器,以用于實時監測工作臺和機械臂的狀態及工作環境。
技術總結
本發明公開的是一種具有智能控制系統的模塊化直線型工作臺,設備架構包括連接在機架上的直線型工作平臺,直線型工作平臺兩側分別安裝有一個能夠沿著直線型工作平臺左右移動的機器人地軌,機器人地軌上面連接有軸且帶有抓手的機械臂,機械臂的上至少連接有一個工業相機、Usb相機、監控相機;系統架構包括智能控制系統以及與智能控制系統通信連接的直線模塊結構控制系統;智能控制系統通過網口與相機、機械臂、直線模塊結構控制系統連接;直線模塊結構控制系統通過網口與機器人地軌、直線型工作平臺通信連接,本發明不僅適用于自動化生產線,還適用于工業制造、物流搬運等多個領域,有效提高生產效率,降低人工成本,推動產業智能化發展。
技術研發人員:趙麗,鄭陽明,蘇彥圣,陳暉陽,劉穎,羅浩,崔家林
受保護的技術使用者:浙江航視智能科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!