一種模塊化機器人桁架爬行步態規劃方法
本發明涉及一種模塊化機器人桁架爬行步態規劃方法,屬于機器人領域。
背景技術:
1、近年來桁架結構廣泛應用于建筑、航天、橋梁和塔架等領域,然而,由于桁架結構的特殊性,機器人只能抓取桿件進行移動,運動方向受限。傳統機器人通常結構固定,在桁架上移動的靈活性和適應性不足,存在難以到達的區域,這就要求機器人具有更高的靈活性和穩定性來適應桁架環境。
2、模塊化機器人結構靈活、適應性強,利用模塊化機器人完成桁架的爬行任務更具優勢。但是,目前的步態設計大多針對傳統結構固定的機器人,難以適應模塊化機器人的非固定結構,并且桁架結構中的爬行步態設計還要確保機器人在桁架運動中的運動穩定性,因此,開展模塊化機器人桁架爬行步態規劃方法研究具有重要的理論研究價值。
技術實現思路
1、有鑒于此,本發明提供一種模塊化機器人桁架爬行步態規劃方法,設計四種步態方式,使機器人能夠適應多種桁架結構場景,提升運動效率與穩定性。
2、本發明所述一種模塊化機器人桁架爬行步態規劃方法,包括:
3、1、一種模塊化機器人桁架爬行步態規劃方法,其特征在于,所述方法包括:
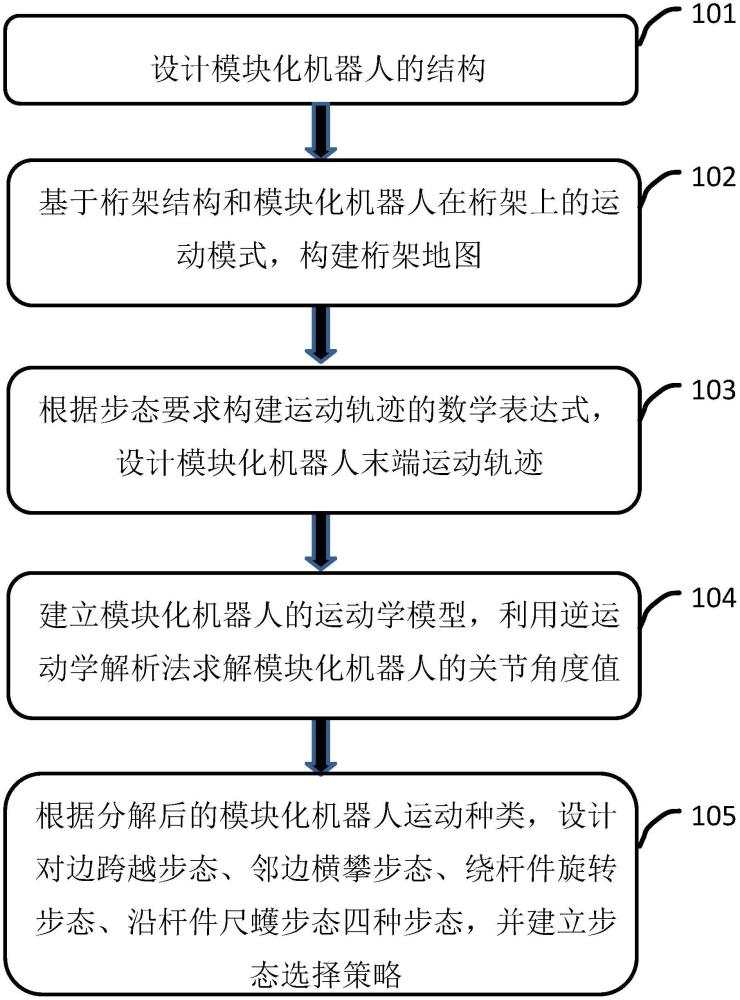
4、設計模塊化機器人的結構,包括:模塊化機器人由n個模塊單元連接而成,每一個模塊單元包括2個外殼、3個電機-減速器組合件、兩個公接口和兩個母接口,3個電機-減速器組合件分布在模塊單元體的體心和兩個外殼上,每個模塊單元內部有3個關節,模塊單元各關節能夠繞公接口中心軸和模塊單元中心軸旋轉;
5、基于桁架結構和模塊化機器人在桁架上的運動模式,構建桁架地圖;
6、根據模塊化機器人的運動需求,將運動分解為同一平面的運動和三維平面轉換運動,同一平面的運動包括沿桿件方向的運動、桁架對邊跨越和桁架鄰邊攀爬三種運動,三維平面轉換運動包括繞桿件的旋轉運動;
7、根據步態要求構建運動軌跡的數學表達式,設計模塊化機器人末端運動軌跡;
8、建立模塊化機器人的運動學模型,利用逆運動學解析法求解模塊化機器人的關節角度值;
9、根據分解后的模塊化機器人運動種類,設計對邊跨越步態、鄰邊橫攀步態、繞桿件旋轉步態、沿桿件尺蠖步態四種步態,并建立步態選擇策略。
10、2、根據權利要求1所述的方法,其特征在于,所述基于桁架結構和模塊化機器人在桁架上的運動模式,構建桁架地圖,包括:
11、以2作為一個桿件的長度,qi=[xi,yi,zi]t表示桁架結構上第i個節點的節點坐標,其中xi、yi、zi均為偶數,構建節點坐標集合q={q1,q2,......,qm},m表示桁架上共有m個節點;識別并選取節點qi,計算其與存在的相鄰節點qi_1=[xi+2,yi,zi]t、qi_2=[xi,yi+2,zi]t、qi_3=[xi,yi,zi+2]t的幾何中點,記錄中間點坐標并編號sj、sj+1、sj+2,構成桁架地圖中的可達點集合s={s1,s2,......,sn}。
12、3、根據權利要求1所述的方法,其特征在于,所述根據步態要求構建運動軌跡的數學表達式,設計模塊化機器人末端運動軌跡,包括:
13、半圓運動軌跡公式建立如下:
14、
15、其中,xs為模塊化機器人的起始水平位置,xf為模塊化機器人的終點水平位置,zs為模塊化機器人的起始高度位置,ts為模塊化機器人的半圓運動的步長周期,為模塊化機器人半圓運動的半徑,xt為關于時間t的水平位置函數,zt為關于時間t的高度函數,σ為關于時間t的弧度函數;
16、直線運動僅高度發生了變化,軌跡公式建立如下:
17、
18、其中,zs為模塊化機器人的起始高度位置,zf為模塊化機器人的終點高度位置,ts為模塊化機器人的直線運動的步長周期,為模塊化機器人直線運動的速度,zt為關于時間t的高度函數。
19、4、根據權利要求1所述的方法,其特征在于,所述建立模塊化機器人的運動學模型,利用逆運動學解析法求解模塊化機器人的關節角度值,包括:針對單鏈機器人進行建模,對于多分支機器人,將其解耦為多個單鏈機器人的進行處理,采用d-h法進行建模,求解關節i變換矩陣公式如下:
20、
21、其中,θi為關節角,di為連桿偏移,ai為連桿長,αi為連桿扭轉角;
22、利用逆運動學分析求解模塊化機器人每個模塊單元3個旋轉關節的角度,設模塊化機器人末端執行器的最終位置和姿態為k為關節總數,為總變換矩陣,等式兩邊逐步左乘變換矩陣公式如下:
23、
24、根據方程左右兩邊矩陣的元素建立新等式,求解關節的角度值θi。
25、5、根據權利要求1所述的方法,其特征在于,所述設計對邊跨越步態、鄰邊橫攀步態、繞桿件旋轉步態、沿桿件尺蠖步態四種步態,包括:
26、①定義模塊化機器人步態的基本參數;
27、②對邊跨越步態下模塊化機器人向對面桿件進行跨越,兩個分支在固定分支和運動分支之間轉換,在一個運動周期內,機體移動距離為一個桿件長度;
28、③鄰邊橫攀步態下模塊化機器人向相鄰桿件進行橫攀,兩個分支在固定分支和運動分支之間轉換,在一個運動周期內,機體移動距離為個桿件長度;
29、④繞桿件旋轉步態下模塊化機器人進行三維平面的轉換,兩個分支在固定分支和運動分支之間轉換,在一個運動周期內,機體在桿件上位置不發生移動;
30、⑤沿桿件尺蠖步態下模塊化機器人向桿件方向移動,兩個分支在固定分支和運動分支之間轉換,在一個運動周期內,機體移動距離為一個桿件長度。
31、6、根據權利要求1所述的方法,其特征在于,所述步態選擇策略包括:
32、①由于模塊化機器人在桁架表面進行爬行,可達點集合s每一個可達點必有一個坐標表示桁架平面,對比上一個運動點和當前運動點,當下一個運動點表示桁架平面的坐標值發生變化時,運動需要進行桁架平面轉換,使用繞桿件旋轉步態;
33、②當前運動點和下一個運動點有一個坐標值發生變化時,運動為桁架平面沿桿件方向移動,使用沿桿件尺蠖步態;
34、③當前運動點和下一個運動點有兩個坐標值發生變化時,并且奇數坐標發生了變化,運動為桁架平面斜向快速移動,使用鄰邊橫攀步態;
35、④當前運動點和下一個運動點有兩個坐標值發生變化時,并且奇數坐標未發生變化,運動為桁架平面桿件間快速跨越,使用對邊跨越步態。
技術特征:
1.一種模塊化機器人桁架爬行步態規劃方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述基于桁架結構和模塊化機器人在桁架上的運動模式,構建桁架地圖,包括:
3.根據權利要求1所述的方法,其特征在于,所述根據步態要求構建運動軌跡的數學表達式,設計模塊化機器人末端運動軌跡,包括:
4.根據權利要求1所述的方法,其特征在于,所述建立模塊化機器人的運動學模型,利用逆運動學解析法求解模塊化機器人的關節角度值,包括:
5.根據權利要求1所述的方法,其特征在于,所述設計對邊跨越步態、鄰邊橫攀步態、繞桿件旋轉步態、沿桿件尺蠖步態四種步態,包括:
6.根據權利要求1所述的方法,其特征在于,所述步態選擇策略包括:
技術總結
本發明提供了一種模塊化機器人桁架爬行步態規劃方法,旨在解決模塊化機器人在復雜桁架結構環境中高效、穩定運動的問題。本發明依據一種模塊化單元的結構進行分析設計,對模塊化機器人進行建模;研究桁架結構,設計方法處理桁架地圖;研究半圓運動和直線運動軌跡,設計模塊化機器人末端的運動軌跡;利用解析法求解模塊化機器人各個關節的角度值;設計對邊跨越步態、鄰邊橫攀步態、繞桿件旋轉步態、沿桿件尺蠖步態四種步態及選擇策略用于模塊化機器人桁架結構平穩爬行步態規劃。本發明適應模塊化機器人的非固定結構和不同桁架結構,能夠快速獲得精確的關節角度值,提高了模塊化機器人桁架爬行的穩定性,適用于航天、建筑維護等場景。
技術研發人員:夏東藝,陳鋼,季寧,劉丹,林吉容,陳凱超,閆英,劉玖慶
受保護的技術使用者:北京郵電大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!