板狀零件的焊接裝置的制作方法
本技術涉及焊接設備,具體涉及板狀零件的焊接裝置。
背景技術:
1、近年來,制造業的機械化程度、自動化程度越來越高。其中,在焊接領域,以往的手持式焊接,正逐步向半自動的焊接裝置過渡。現有的焊接裝置,一般是先通過人工將零件安裝在夾持臺,接著通過氣缸驅使電極平移,從而實現對零件的焊接。在生產加工汽車零件時,會涉及到板狀零件的焊接;這些板狀零件往往體型較大、形狀不規則,且常常需要在多處進行焊接。而現有焊接裝置的電極自由度很低,往往只能進行一個方向上的簡單平移,無法很好地滿足這類板狀零件的焊接需求。
技術實現思路
1、本實用新型的目的在于提供板狀零件的焊接裝置,其具有更高的自由度,可以靈活地在板狀零件的不同位置進行焊接加工。
2、為實現上述目的,本實用新型采用的技術方案是:
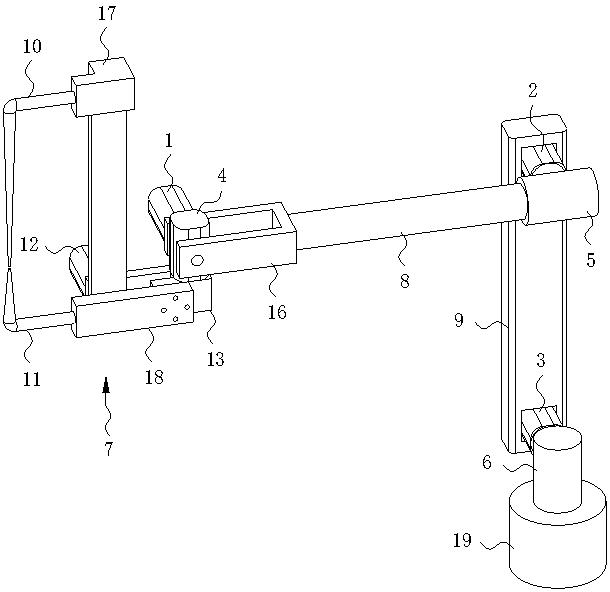
3、板狀零件的焊接裝置,包括:電極組、驅使電極組轉動的第四伺服電機、驅使第四伺服電機轉動的第一伺服電機、用于安裝第一伺服電機的第一延長臂、驅使第一延長臂轉動的第二伺服電機、用于安裝第二伺服電機的第二延長臂、驅使第二延長臂轉動的第三伺服電機;其中,所述第一伺服電機的轉軸,平行于第二伺服電機的轉軸、第三伺服電機的轉軸,垂直于第四伺服電機的轉軸、第一延長臂的長度方向、第二延長臂的長度方向;所述電極組包括:第一電極、第二電極、驅使第一電極靠近或遠離第二電極的動力源;以焊接時第一電極的焊接點、第二電極的焊接點確定直線l,所述第四伺服電機的轉軸與直線l平行。
4、可選的,所述電極組還包括:支架;所述支架包括:相互平行的第一安裝板與第二安裝板、連接第一安裝板與第二安裝板的連接板;所述動力源安裝于第一安裝板,所述第二電極安裝于第二安裝板。
5、可選的,所述連接板與第四伺服電機的轉軸連接;所述第一延長臂的左端設有第一連接部,所述第四伺服電機與第一連接部轉動連接;所述第一伺服電機安裝于第一連接部的側面,所述第二伺服電機位于第一延長臂的右端。
6、可選的,所述第一延長臂的右端設置驅使其轉動的第五伺服電機,所述第五伺服電機的轉軸平行于第一延長臂的長度方向;所述第五伺服電機在其殼體的一側設置第五連接部,所述第五連接部與第二伺服電機的轉軸連接。
7、可選的,所述第二延長臂的上端設有用于安裝第二伺服電機的第二安裝槽,所述第二延長臂的下端設有用于安裝第三伺服電機的第三安裝槽。
8、可選的,還包括:驅使第三伺服電機轉動的第六伺服電機;所述第六伺服電機的轉軸沿上下方向延伸,且與第三伺服電機的轉軸相互垂直。
9、可選的,所述第六伺服電機在其殼體的一側設置第六連接部,所述第六連接部與第三伺服電機的轉軸連接;所述第六伺服電機的轉軸與底座連接。
10、可選的,所述第一電極包括:第一主體段、與第一主體段連接的第一彎折段;所述第一彎折段安裝于第一懸臂;所述動力源通過驅使第一懸臂移動,帶動第一電極靠近或遠離第二電極。
11、可選的,所述第二電極包括:第二主體段、與第二主體段連接的第二彎折段;所述第二彎折段安裝于第二懸臂;所述第二懸臂安裝于第二安裝板。
12、本實用新型的工作原理為:通過第一伺服電機驅使第四伺服電機及電極組轉動,通過第二伺服電機驅使第一延長臂轉動,通過第三伺服電機驅使第二延長臂轉動,可沿左右方向或上下方向調整電極組的位置。通過第四伺服電機驅使電極組轉動,可沿前后方向及左右方向調整電極組的位置。令動力源驅使第一電極靠近第二電極,即可對板狀零件進行焊接;令動力源驅使第一電極遠離第二電極,即可停止焊接。
13、由此可知,本實用新型的有益效果是:電極組具有更高的自由度,可以靈活地調整位置,從而在板狀零件的不同位置進行焊接加工。
技術特征:
1.板狀零件的焊接裝置,其特征在于,包括:
2.根據權利要求1所述的板狀零件的焊接裝置,其特征在于:
3.根據權利要求2所述的板狀零件的焊接裝置,其特征在于:
4.根據權利要求1到3中任意一項所述的板狀零件的焊接裝置,其特征在于:
5.根據權利要求4所述的板狀零件的焊接裝置,其特征在于:
6.根據權利要求5所述的板狀零件的焊接裝置,其特征在于:
7.根據權利要求6所述的板狀零件的焊接裝置,其特征在于:
8.根據權利要求1到3中任意一項所述的板狀零件的焊接裝置,其特征在于:
9.根據權利要求1到3中任意一項所述的板狀零件的焊接裝置,其特征在于:
技術總結
本技術提供了板狀零件的焊接裝置。目的是解決現有焊接裝置無法靈活調整焊接位置的技術問題。所采用的技術方案是:板狀零件的焊接裝置,包括:電極組、驅使電極組轉動的第四伺服電機、驅使第四伺服電機轉動的第一伺服電機、用于安裝第一伺服電機的第一延長臂、驅使第一延長臂轉動的第二伺服電機、用于安裝第二伺服電機的第二延長臂、驅使第二延長臂轉動的第三伺服電機;第一伺服電機的轉軸,平行于第二伺服電機的轉軸、第三伺服電機的轉軸,垂直于第四伺服電機的轉軸、第一延長臂的長度方向、第二延長臂的長度方向。本技術具有更高的自由度,可以靈活地在板狀零件的不同位置進行焊接加工。
技術研發人員:金昊,唐鑫,林功武,李陽
受保護的技術使用者:成都華滋東江汽車零部件有限公司
技術研發日:20240708
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!