一種機械加工裝備機器人
本發明屬于機器人,具體的說是一種機械加工裝備機器人。
背景技術:
1、機械加工是指通過一種機械設備對工件的外形尺寸或性能進行改變的過程。按加工方式上的差別,機械加工可分為切削加工和壓力加工,在機械加工過程中,通常會使用到工業機器人對機械配件進行裝備等工作,工業機器人是用于制造生產的機器人系統。
2、一般的焊接機器人為了增大其轉角以及靈活度,其焊接臂會設置較多組轉動關節,研發成本較高,且后期維護保養工作較為困難,并且在焊接連件的底部位置時容易出現焊接不牢固甚至漏焊的問題,進而導致需要采用多次焊接的方式進行工作,操作較為煩瑣,所以需要進行改進。
技術實現思路
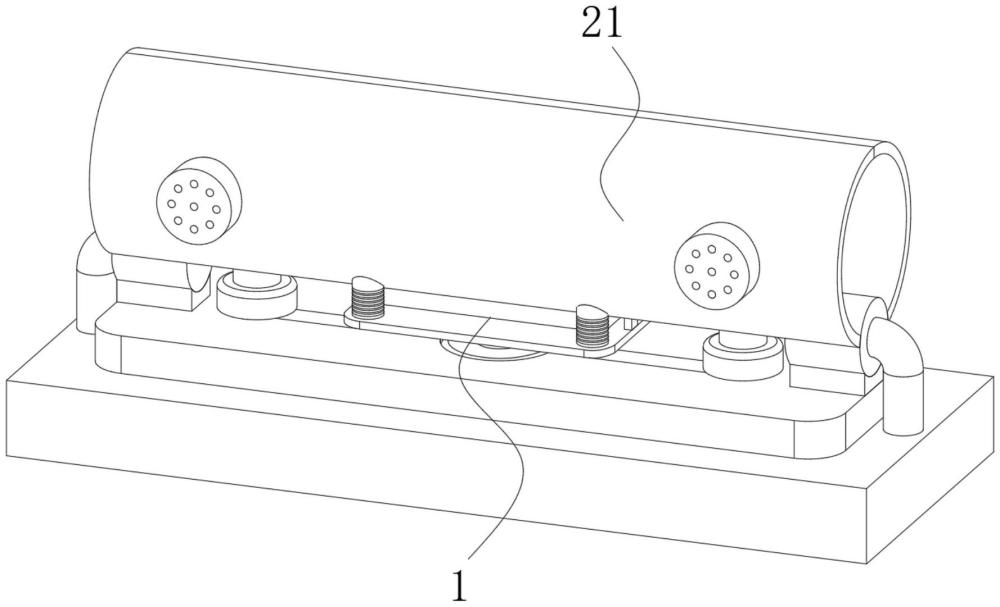
1、針對現有技術的不足,本發明解決其技術問題所采用的技術方案是:一種機械加工裝備機器人,包括固定底座,所述固定底座上表面的中部設置有夾持設備,所述固定底座的前后兩側對稱設置有筒焊設備;
2、所述夾持設備包括牽引設備,所述牽引設備的兩側對稱設置有控制拉索,所述控制拉索遠離牽引設備的一端固定連接有偏向調高桿,控制拉索通過固定底座內部的套筒與偏向調高桿的底部固定連接,所述偏向調高桿的頂端固定連接有轉軸端頭,轉軸端頭的側面為弧形面,可以沿著轉軸端頭的外表面進行轉動,所述轉軸端頭外表面的兩側對稱設置有偏向夾板,所述偏向夾板的內壁滑動連接有緩沖彈簧板,所述偏向夾板外表面的前后兩側對稱設置有雙向推筒;
3、所述筒焊設備包括偏轉筒殼,所述偏轉筒殼內壁的中部固定連接有弧形滑殼,所述弧形滑殼的內壁滑動連接有引導滑桿,引導滑桿在限制的弧形滑殼內部進行滑移,從而改變焊接角度,所述引導滑桿外表面的中部滑動連接有焊接箱殼,所述焊接箱殼內腔的底部均勻設置有推進焊桿,推進焊桿可以在焊接箱殼的控制下,從內部滑出,進而實現推進焊接端頭的效果,所述偏轉筒殼內腔的兩側通過插接口對稱設置有吸附內筒,所述吸附內筒進氣口的內壁固定連接有空心連通管,吸附內筒通過空心連通管對裝置內部焊接區域的空氣進行排氣工作。所述固定底座包括固定底板,所述固定底板內壁的軸心處通過引導滑槽設置有監控設備,所述固定底座上表面的左右兩側對稱設置有引導轉軸,所述偏轉筒殼底部的兩側均與引導轉軸的外表面轉動連接。
4、進一步地,所述引導滑桿的兩端均通過主動滾輪與弧形滑殼的內壁滑動連接,所述焊接箱殼的內壁通過引導滑槽與引導滑桿的外表面滑動連接,所述吸附內筒的外表面通過插接口與偏轉筒殼的內腔固定連接,且吸附內筒進氣口的一端延伸至偏轉筒殼的外部。所述牽引設備的外表面與固定底板內腔頂部的軸心處固定連接,所述偏向調高桿的底端通過套筒與固定底板內腔的軸心處滑動連接,所述雙向推筒輸出軸的頂端與偏向夾板的外表面固定連接。所述偏向夾板的數量為四個,所述偏向夾板外表面遠離牽引設備的一側與轉軸端頭的外表面轉動連接,所述緩沖彈簧板的外表面通過弧形彈簧與偏向夾板的內壁滑動連接。
5、進一步地,所述監控設備包括平面板,所述平面板上表面的前后兩側對稱設置有緩沖推筒,所述平面板上表面的中部固定連接有固定套殼,所述固定套殼的內部設置有吸附設備,所述固定套殼頂部的軸心處轉動連接有軸心轉桿,所述軸心轉桿的兩端對稱設置有控制馬達,所述軸心轉桿外表面的兩側對稱設置有平行轉板,所述平行轉板的內腔均勻設置有探照鏡頭,探照鏡頭位于底部,正對所焊接物體焊接面的相反的一側進行內監控工作。所述平面板下表面的軸心處與牽引設備上表面的軸心處固定連接,所述緩沖推筒的頂部與偏轉筒殼外表面的下部固定連接,所述控制馬達的外表面通過固定板與固定底板的上表面固定連接,所述平行轉板的一側與軸心轉桿的外表面固定連接,所述平行轉板的另一側與固定套殼的內壁滑動連接。
6、進一步地,所述吸附設備包括引導內殼,所述引導內殼內腔的兩側均通過滑切槽對稱設置有受壓滑板,所述受壓滑板的下表面通過滑動彈簧與引導內殼的內腔滑動連接,所述引導內殼內腔頂部的軸心處均勻設置有滑動套筒,所述滑動套筒內壁的底部滑動連接有觸發吸附泵,所述觸發吸附泵進氣口的底端固定連接有過濾網筒,在軸心轉桿轉動至豎直狀態時,豎直狀態的平行轉板會將正下方的滑動套筒向下按壓,進而觸發啟動泵體,并將受壓滑板向下推動,打開引導內殼的側邊切槽口。所述滑動套筒下表面的前后兩側均與受壓滑板的上表面相互擠壓,所述引導內殼的底部與固定底板內壁底部的軸心處固定連接,所述滑動套筒的內壁通過彈簧與觸發吸附泵的上表面相互擠壓。
7、本發明的有益效果如下:
8、1.該裝置可以先通過兩側的偏向夾板將焊接的兩工件進行夾持對接,然后配合兩側的推進焊桿進行焊接工作,由于焊接時,夾持的工件還能通過轉軸端頭進行軸心旋轉,焊接箱殼可以沿著引導滑桿的弧槽進行水平滑移,并且引導滑桿可以沿著弧形滑殼進行偏轉,所以暴露在兩側偏向夾板之間的間隙可以完全實現焊接工作,進而有效避免出現焊接連件的底部位置時容易出現焊接不牢固甚至漏焊的問題,并且保證焊接工作的連貫性,不需要手動進行調整工作。
9、2.工件在進行焊接工作時,兩側的偏轉筒殼會對接在一起,進而將工件與外部隔開,能夠保證焊接產生的光熱不會傷害外部的人員,同時合并的偏轉筒殼具備保護功能,保證工件在進行轉動焊接時,如果出現夾持不牢固的問題而甩飛的現象時,偏轉筒殼可以將工件擋住,避免出現工件傷人的問題。
10、3.在進行焊接工作的時候,兩側的吸附內筒可以通過空心連通管將中部區域的焊接空間進行抽氣工作,將焊接產生的有毒氣體通過吸附內筒不斷排放到外部,進而在焊接結束打開偏轉筒殼的時候,取出焊接工作的人員不會因為吸入內部大量難以擴散的有毒氣體,從而出現中毒的問題。
11、4.由于監控設備位于焊接件的正下方,所以位于兩側平行轉板的探照鏡頭會很容易附著焊接產生的浮灰,進而導致觀測畫面越來越不清晰,可以通過轉動軸心轉桿的方式,將平行轉板離心轉動,使探照鏡頭外表面附著的灰塵通過離心轉動的方式甩掉,觸發吸附泵也可以隨著平行轉板的轉動狀態,自動改變工作狀態對平行轉板的側面進行吸灰工作,也能自動停止工作節約電力。
技術特征:
1.一種機械加工裝備機器人,包括固定底座(1),其特征在于:
2.根據權利要求1所述的機械加工裝備機器人,其特征在于:所述固定底座(1)包括固定底板(11),所述固定底板(11)內壁的軸心處通過引導滑槽(12)設置有監控設備(14),所述固定底座(1)上表面的左右兩側對稱設置有引導轉軸(13),所述偏轉筒殼(21)底部的兩側均與引導轉軸(13)的外表面轉動連接。
3.根據權利要求2所述的機械加工裝備機器人,其特征在于:所述引導滑桿(23)的兩端均通過主動滾輪與弧形滑殼(22)的內壁滑動連接,所述焊接箱殼(24)的內壁通過引導滑槽(12)與引導滑桿(23)的外表面滑動連接,所述吸附內筒(26)的外表面通過插接口與偏轉筒殼(21)的內腔固定連接,且吸附內筒(26)進氣口的一端延伸至偏轉筒殼(21)的外部。
4.根據權利要求3所述的機械加工裝備機器人,其特征在于:所述牽引設備(31)的外表面與固定底板(11)內腔頂部的軸心處固定連接,所述偏向調高桿(33)的底端通過套筒與固定底板(11)內腔的軸心處滑動連接,所述雙向推筒(37)輸出軸的頂端與偏向夾板(35)的外表面固定連接。
5.根據權利要求4所述的機械加工裝備機器人,其特征在于:所述偏向夾板(35)的數量為四個,所述偏向夾板(35)外表面遠離牽引設備(31)的一側與轉軸端頭(34)的外表面轉動連接,所述緩沖彈簧板(36)的外表面通過弧形彈簧與偏向夾板(35)的內壁滑動連接。
6.根據權利要求2所述的機械加工裝備機器人,其特征在于:所述監控設備(14)包括平面板(141),所述平面板(141)上表面的前后兩側對稱設置有緩沖推筒(142),所述平面板(141)上表面的中部固定連接有固定套殼(143),所述固定套殼(143)的內部設置有吸附設備(4),所述固定套殼(143)頂部的軸心處轉動連接有軸心轉桿(145),所述軸心轉桿(145)的兩端對稱設置有控制馬達(144),所述軸心轉桿(145)外表面的兩側對稱設置有平行轉板(146),所述平行轉板(146)的內腔均勻設置有探照鏡頭(147)。
7.根據權利要求6所述的機械加工裝備機器人,其特征在于:所述平面板(141)下表面的軸心處與牽引設備(31)上表面的軸心處固定連接,所述緩沖推筒(142)的頂部與偏轉筒殼(21)外表面的下部固定連接,所述控制馬達(144)的外表面通過固定板與固定底板(11)的上表面固定連接,所述平行轉板(146)的一側與軸心轉桿(145)的外表面固定連接,所述平行轉板(146)的另一側與固定套殼(143)的內壁滑動連接。
8.根據權利要求7所述的機械加工裝備機器人,其特征在于:所述吸附設備(4)包括引導內殼(41),所述引導內殼(41)內腔的兩側均通過滑切槽對稱設置有受壓滑板(42),所述受壓滑板(42)的下表面通過滑動彈簧(43)與引導內殼(41)的內腔滑動連接,所述引導內殼(41)內腔頂部的軸心處均勻設置有滑動套筒(44),所述滑動套筒(44)內壁的底部滑動連接有觸發吸附泵(45),所述觸發吸附泵(45)進氣口的底端固定連接有過濾網筒(46)。
9.根據權利要求8所述的機械加工裝備機器人,其特征在于:所述滑動套筒(44)下表面的前后兩側均與受壓滑板(42)的上表面相互擠壓,所述引導內殼(41)的底部與固定底板(11)內壁底部的軸心處固定連接,所述滑動套筒(44)的內壁通過彈簧與觸發吸附泵(45)的上表面相互擠壓。
技術總結
本發明屬于機器人技術領域,具體的說是一種機械加工裝備機器人,包括固定底座,所述固定底座上表面的中部設置有夾持設備,所述固定底座的前后兩側對稱設置有筒焊設備;所述夾持設備包括牽引設備,所述牽引設備的兩側對稱設置有控制拉索,所述控制拉索遠離牽引設備的一端固定連接有偏向調高桿。由于焊接時,夾持的工件還能通過轉軸端頭進行軸心旋轉,焊接箱殼可以沿著引導滑桿的弧槽進行水平滑移,并且引導滑桿可以沿著弧形滑殼進行偏轉,所以暴露在兩側偏向夾板之間的間隙可以完全實現焊接工作,進而有效避免出現焊接連件的底部位置時容易出現焊接不牢固甚至漏焊的問題,并且保證焊接工作的連貫性,不需要手動進行調整工作。
技術研發人員:呂良,崔冰,黃銳,萬長東
受保護的技術使用者:蘇州市職業大學
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!