一種頭尾板自動裝配裝置的制作方法
本申請提供一種頭尾板自動裝配裝置,涉及建筑工程。
背景技術:
1、針對建筑樁類生產線,包括管樁、方樁、抗拔樁、波浪樁、木紋樁等樁頭的頭尾板與法蘭板組件的裝配,目前市面上管樁生產過程中對管樁端頭的頭尾板螺栓鎖緊工藝,普遍是工人將籠筋放入底模上,如圖1-圖6所示。人工在籠筋兩端套入法蘭板,再將頭板和尾板分別與兩端法蘭板螺紋孔對齊后,人工手動插入螺栓后,再使用擰緊工具對兩端的頭板和尾板與對應的法蘭板螺栓擰緊。
2、為提高頭尾板裝配效率,已公開專利文件cn218341471u頭尾板組件的裝配及轉運系統中采用頭尾板組件裝配系統來提高自動化效率,但由于螺栓對孔存在誤差,無人工監管,自動化裝配過程容易出現因孔位偏差帶來的后續自動鎖緊螺栓過程中的異常情況,反而降低了頭尾板裝配效率。
技術實現思路
1、本申請要解決的技術問題是:如何提高頭尾板裝配效率。
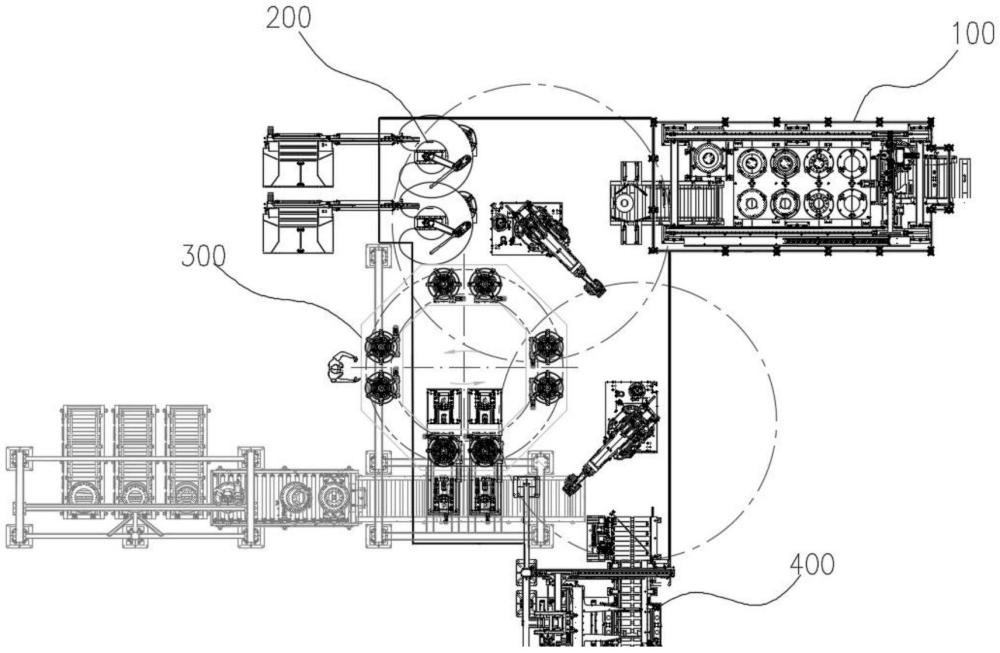
2、為解決上述技術問題,本申請提供了一種頭尾板自動裝配裝置,包括存儲頭板和尾板物料并進行上料的頭尾板儲料上料模塊、用于螺栓穿釘的頭尾板螺栓定位穿釘模塊、用于螺栓裝配的多工位轉臺螺栓裝配模塊和成品出料滾筒線;
3、所述多工位轉臺螺栓裝配模塊包括伺服轉臺,所述伺服轉臺設有通過旋轉切換的四功能工位:法蘭板放料工位、頭尾板對孔放料工位、人工監管工位以及螺栓裝配工位。
4、優選的,所述頭尾板儲料上料模塊包括用于存儲頭板和尾板的儲料桁架、設于儲料桁架上的吸盤上料動作器以及用于運送頭板和尾板的滾筒運送線。
5、優選的,所述吸盤上料動作器包括設于儲料桁架上可橫向移動及升降的電磁吸盤,用于吸取頭板或尾板運送至所述滾筒運送線上,所述滾筒運送線末端延伸至頭尾板螺栓定位穿釘模塊。
6、優選的,所述頭尾板螺栓定位穿釘模塊包括第一工業機器人和定位穿釘組件,所述定位穿釘組件包括穿釘定位盤、第二工業機器人、螺栓搓板機;所述滾筒運送線末端設于所述第一工業機器人取料范圍內;所述穿釘定位盤限定出頭尾板穿釘工位。
7、優選的,所述頭尾板螺栓定位穿釘模塊還包括設于穿釘定位盤上方的視覺采集器,通過視覺圖像處理技術對頭板或尾板的螺栓孔位識別進行角度糾偏。
8、優選的,所述多工位轉臺螺栓裝配模塊還包括法蘭板上料組件和用于將法蘭板上料至伺服轉臺的第三工業機器人。
9、優選的,所述功能工位設有伺服自轉液壓夾緊卡盤,用于夾緊物料及帶動物料旋轉。
10、優選的,所述法蘭板上料組件包括法蘭板集料滾筒線、上料伺服桁架、法蘭板上料滾筒線,上料伺服桁架位于法蘭板集料滾筒線傳輸末端,上料伺服桁架范圍覆蓋法蘭板集料滾筒線和法蘭板上料滾筒線,上料伺服桁架上設有電磁吸盤,用于吸取法蘭板集料滾筒線上的法蘭板并運送至法蘭板上料滾筒線上,法蘭板上料滾筒線末端設于第三工業機器人取料范圍內。
11、優選的,所述法蘭板放料工位位于第三工業機器人取料范圍內,所述頭尾板對孔放料工位上方設有視覺采集器,通過視覺圖像處理技術對頭板或尾板與法蘭板對孔糾偏;所述人工監管工位旁設有手動風炮及支架;所述螺栓裝配工位設有螺栓自動擰緊機。
12、優選的,所述螺栓裝配工位設于第三工業機器人取料范圍內,所述成品出料滾筒線設于第三工業機器人取料范圍內。
13、本申請技術方案所提供的人工監管工位作為頭尾板緩存工位,能有效解決耗品法蘭板在加工過程中因孔位偏差帶來的后續伺服擰緊槍在自動鎖緊螺栓過程中的異常情況,人工能快速調整生產過程異常情況的發生,以保障生產效率和降低對產能的影響。
技術特征:
1.一種頭尾板自動裝配裝置,其特征在于,包括存儲頭板和尾板物料并進行上料的頭尾板儲料上料模塊、用于螺栓穿釘的頭尾板螺栓定位穿釘模塊、用于螺栓裝配的多工位轉臺螺栓裝配模塊和成品出料滾筒線;
2.根據權利要求1所述的一種頭尾板自動裝配裝置,其特征在于,所述頭尾板儲料上料模塊包括用于存儲頭板和尾板的儲料桁架、設于儲料桁架上的吸盤上料動作器以及用于運送頭板和尾板的滾筒運送線。
3.根據權利要求2所述的一種頭尾板自動裝配裝置,其特征在于,所述吸盤上料動作器包括設于儲料桁架上可橫向移動及升降的電磁吸盤,用于吸取頭板或尾板運送至所述滾筒運送線上,所述滾筒運送線末端延伸至頭尾板螺栓定位穿釘模塊。
4.根據權利要求2所述的一種頭尾板自動裝配裝置,其特征在于,所述頭尾板螺栓定位穿釘模塊包括第一工業機器人和定位穿釘組件,所述定位穿釘組件包括穿釘定位盤、第二工業機器人、螺栓搓板機;所述滾筒運送線末端設于所述第一工業機器人取料范圍內;所述穿釘定位盤限定出頭尾板穿釘工位。
5.根據權利要求4所述的一種頭尾板自動裝配裝置,其特征在于,所述頭尾板螺栓定位穿釘模塊還包括設于穿釘定位盤上方的視覺采集器,通過視覺圖像處理技術對頭板或尾板的螺栓孔位識別進行角度糾偏。
6.根據權利要求1所述的一種頭尾板自動裝配裝置,其特征在于,所述多工位轉臺螺栓裝配模塊還包括法蘭板上料組件和用于將法蘭板上料至伺服轉臺的第三工業機器人。
7.根據權利要求6所述的一種頭尾板自動裝配裝置,其特征在于,所述功能工位設有伺服自轉液壓夾緊卡盤,用于夾緊物料及帶動物料旋轉。
8.根據權利要求6所述的一種頭尾板自動裝配裝置,其特征在于,所述法蘭板上料組件包括法蘭板集料滾筒線、上料伺服桁架、法蘭板上料滾筒線,上料伺服桁架位于法蘭板集料滾筒線傳輸末端,上料伺服桁架范圍覆蓋法蘭板集料滾筒線和法蘭板上料滾筒線,上料伺服桁架上設有電磁吸盤,用于吸取法蘭板集料滾筒線上的法蘭板并運送至法蘭板上料滾筒線上,法蘭板上料滾筒線末端設于第三工業機器人取料范圍內。
9.根據權利要求6所述的一種頭尾板自動裝配裝置,其特征在于,所述法蘭板放料工位位于第三工業機器人取料范圍內,所述頭尾板對孔放料工位上方設有視覺采集器,通過視覺圖像處理技術對頭板或尾板與法蘭板對孔糾偏;所述人工監管工位旁設有手動風炮及支架;所述螺栓裝配工位設有螺栓自動擰緊機。
10.根據權利要求9所述的一種頭尾板自動裝配裝置,其特征在于,所述螺栓裝配工位設于第三工業機器人取料范圍內,所述成品出料滾筒線設于第三工業機器人取料范圍內。
技術總結
本申請公開了一種頭尾板自動裝配裝置,包括存儲頭板和尾板物料并進行上料的頭尾板儲料上料模塊、用于螺栓穿釘的頭尾板螺栓定位穿釘模塊、用于螺栓裝配的多工位轉臺螺栓裝配模塊和成品出料滾筒線;所述多工位轉臺螺栓裝配模塊包括伺服轉臺,所述伺服轉臺設有通過旋轉切換的四功能工位:法蘭板放料工位、頭尾板對孔放料工位、人工監管工位以及螺栓裝配工位。本申請技術方案所提供的人工監管工位作為頭尾板緩存工位,能有效解決耗品法蘭板在加工過程中因孔位偏差帶來的后續伺服擰緊槍在自動鎖緊螺栓過程中的異常情況,以保障生產效率和降低對產能的影響。
技術研發人員:湯業利,袁文軍,毛文斌
受保護的技術使用者:湯始建華建材(上海)有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!