一種自適應緊固件裝配機器人的制作方法
本發明涉及緊固件裝配,具體為一種自適應緊固件裝配機器人。
背景技術:
1、緊固件的主要功能是連接和固定所需要使用的零件和器件,將整個機器或設備組裝成一個完整的裝置。它們通過螺紋、卡扣或其他方式,將不同的部件緊密地連接在一起,確保機器或設備在使用過程中不會出現松動或其他故障。這種連接和固定的作用對于機械裝置的穩定性和可靠性至關重要。其中,緊固件的種類的也是相當多,膨脹螺栓也是其中之一,膨脹螺栓是一種特殊的螺紋連接件,主要用于將管路支/吊/托架或設備固定在墻上、樓板上、柱上。它由多個部件組成,包括沉頭螺栓、脹管、平墊圈、彈簧墊和六角螺母等。
2、由于膨脹螺栓在使用過程中,其部件相對多,以及各個部件呈配套使用,因此需要將沉頭螺栓及六角螺母配合,并且將脹管、平墊圈及彈簧墊限位在沉頭螺栓上,而在生產中需要膨脹螺栓進行組裝,組裝中往往是人工進行操作,需要將沉頭螺栓及六角螺母分別手持,然后相對轉動,使連著進行配合,而沉頭螺栓露出脹管的范圍有限,使手持的位置有限,當六角螺母沒有與沉頭螺栓進行螺紋連接,而硬轉,即使配合了也會對沉頭螺栓或者六角螺母的螺紋產生損傷。另外,即使六角螺母與沉頭螺栓配合,兩者需要轉動相對多的圈數,才能避免脫離,六角螺母轉動具有阻力時,則需要一圈一圈的手動轉動,則更加影響效率。
技術實現思路
1、本發明的目的在于提供一種自適應緊固件裝配機器人,以解決上述背景技術中提出的問題。
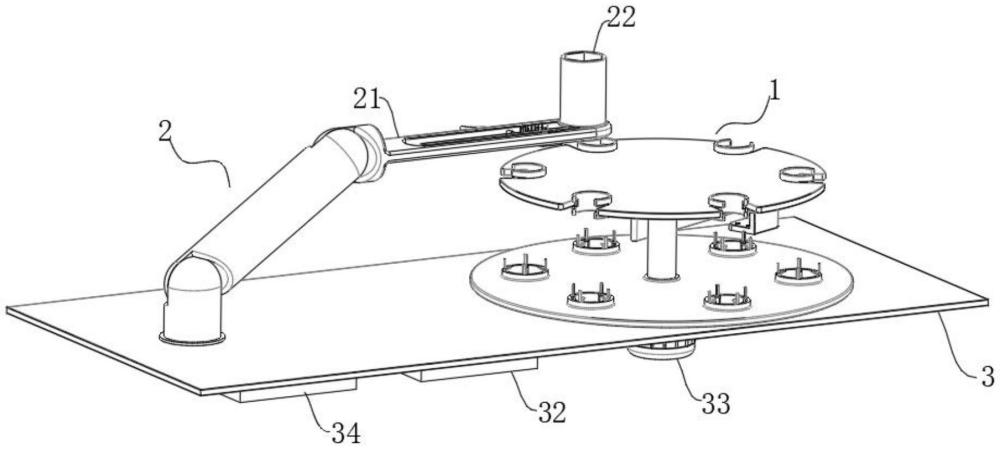
2、為了解決上述技術問題,本發明提供如下技術方案:一種自適應緊固件裝配機器人,包括轉盤及機械臂,所述轉盤用于將沉頭螺栓限位,所述機械臂用于將六角螺母與沉頭螺栓配合,所述轉盤包括:
3、盤體一,其外側具有用于將脹管夾持的夾口;
4、盤體二,設置在盤體一的下端,將沉頭螺栓進行限位,所述機械臂包括:
5、控制臂,所述控制臂能水平及傾斜的運動,用于將六角螺母傾倒;
6、筒體,固定在控制臂上端,用于將多個六角螺母限位;
7、氣嘴,插設至控制臂內,對傾倒出的六角螺母產生吹動的力,控制六角螺母與沉頭螺栓配合。
8、進一步的,所述盤體一與盤體二之間固定有支撐軸,所述盤體一的夾口內固定有具有彈性的c形夾,所述c形夾用于將脹管進行夾持。
9、進一步的,所述盤體二的上端固定有與夾口同軸線的抵圈,所述抵圈的內壁上具有凹陷的卡口,所述卡口內轉動設有v形夾,所述v形夾兩側均設有復位的用的扭簧,在所述v形夾復位狀態下,兩根分支的其中一根分支呈豎直設置。
10、進一步的,所述轉盤及機械臂的下端設有支板,所述機械臂固定在支板上,所述轉盤轉動設置在支板上,所述轉盤的下端設有控制部,所述控制部包括:
11、控制器,設置在支板的下端;
12、位置傳感器,設置在控制臂的下端且與控制器電性連接,用于檢測轉盤是否轉動;
13、液壓泵,位于控制臂外側,用于控制控制臂的角度調節,所述液壓泵與控制器電性連接;
14、伺服電機,固定在支板下端,且其輸出端與轉盤固定,所述伺服電機與控制器電性連接。
15、進一步的,所述盤體一及盤體二之間還設有擋板,所述擋板位置保持不動,且其用于將脹管擠壓出c形夾。
16、進一步的,所述控制臂從上之下貫穿設有滑口,所述控制臂上下兩側均固定有限位片,所述限位片將滑口內的六角螺母限位,且所述滑口兩側內壁與六角螺母側邊接觸,所述筒體與滑口端部重合;
17、所述控制臂從上之下貫穿設有圓形口,所述圓形口與滑口重合,且所述圓形口內設有能轉動的內轉動架,所述氣嘴插設至滑口,且其端部傾斜的對著內轉動架,在所述控制臂傾斜時,筒體內的螺栓進入至內轉動架內;
18、所述控制臂下端還設有水平傳感器,所述水平傳感器與控制器電性連接,所述氣嘴的外端連接有氣泵,所述氣泵與控制器也電性連接,所述控制臂是否水平控制氣泵是否吹氣。
19、進一步的,所述圓形口的內壁上一體設有內加強軸,所述內轉動架包括圓形架、縱向片及橡膠邊,所述圓形架設置在圓形口內,所述圓形架上端固定有扇形分布的縱向片,所述縱向片外側開設有與內加強軸配合的外口,所述圓形架上貫穿設有六邊形口,且所述六邊形口與六邊形螺母形狀相同,所述橡膠邊固定在六邊形口內壁上。
20、進一步的,最邊上的所述縱向片為磁性設置,所述圓形口內壁相對位置也為磁性設置。
21、與現有技術相比,本發明所達到的有益效果是:本發明通過脹管夾持在c形夾內,實現轉動,同時控制臂呈傾斜至水平的變化,將六角螺母與沉頭螺栓配合,實現完成加工,后續被擋板擠壓出,控制臂從傾斜至水平狀再到傾斜的后一秒,轉盤轉動,使位置傳感器檢測到,控制臂再次進行一個周期的運動,實現不斷進行將六角螺母與沉頭螺栓配合;
22、將脹管夾持在c形夾內,脹管向下推擠至最下端,使沉頭螺栓的下端及側邊與v形夾相抵,避免產生轉動,側向力推動脹管與c形夾分離,能直接將沉頭螺栓取出,便于操作;
23、控制臂傾斜變化時,筒體使最下端的六角螺母沿著滑口運動至圓形架上,風力吹動縱向片進行轉動,使六角螺母轉動,實現兩者的配合,使該裝配機器人自動化程度高,進一步壓縮裝配的時間。
技術特征:
1.一種自適應緊固件裝配機器人,其特征在于,包括轉盤(1)及機械臂(2),所述轉盤(1)用于將沉頭螺栓限位,所述機械臂(2)用于將六角螺母與沉頭螺栓配合,所述轉盤(1)包括:
2.根據權利要求1所述的自適應緊固件裝配機器人,其特征在于:所述盤體一(11)與盤體二(12)之間固定有支撐軸(13),所述盤體一(11)的夾口(14)內固定有具有彈性的c形夾(15),所述c形夾(15)用于將脹管進行夾持。
3.根據權利要求1所述的自適應緊固件裝配機器人,其特征在于:所述盤體二(12)的上端固定有與夾口(14)同軸線的抵圈(121),所述抵圈(121)的內壁上具有凹陷的卡口(122),所述卡口(122)內轉動設有v形夾(123),所述v形夾(123)兩側均設有復位的用的扭簧,在所述v形夾(123)復位狀態下,兩根分支的其中一根分支呈豎直設置。
4.根據權利要求3所述的自適應緊固件裝配機器人,其特征在于:所述轉盤(1)及機械臂(2)的下端設有支板(3),所述機械臂(2)固定在支板(3)上,所述轉盤(1)轉動設置在支板(3)上,所述轉盤(1)的下端設有控制部,所述控制部包括:
5.根據權利要求3所述的自適應緊固件裝配機器人,其特征在于:所述盤體一(11)及盤體二(12)之間還設有擋板(16),所述擋板(16)位置保持不動,且其用于將脹管擠壓出c形夾(15)。
6.根據權利要求4所述的自適應緊固件裝配機器人,其特征在于:所述控制臂(21)從上之下貫穿設有滑口(211),所述控制臂(21)上下兩側均固定有限位片(212),所述限位片(212)將滑口(211)內的六角螺母限位,且所述滑口(211)兩側內壁與六角螺母側邊接觸,所述筒體(22)與滑口(211)端部重合;
7.根據權利要求6所述的自適應緊固件裝配機器人,其特征在于:所述圓形口(213)的內壁上一體設有內加強軸(214),所述內轉動架(23)包括圓形架(231)、縱向片(232)及橡膠邊(235),所述圓形架(231)設置在圓形口(213)內,所述圓形架(231)上端固定有扇形分布的縱向片(232),所述縱向片(232)外側開設有與內加強軸(214)配合的外口(233),所述圓形架(231)上貫穿設有六邊形口(234),且所述六邊形口(234)與六邊形螺母形狀相同,所述橡膠邊(235)固定在六邊形口(234)內壁上。
8.根據權利要求7所述的自適應緊固件裝配機器人,其特征在于:最邊上的所述縱向片(232)為磁性設置,所述圓形口(213)內壁相對位置也為磁性設置。
技術總結
本發明公開了一種自適應緊固件裝配機器人,包括轉盤及機械臂,所述轉盤用于將沉頭螺栓限位,所述機械臂用于將六角螺母與沉頭螺栓配合,所述轉盤包括:盤體一,其外側具有用于將脹管夾持的夾口;盤體二,設置在盤體一的下端,將沉頭螺栓進行限位,所述機械臂包括:控制臂,所述控制臂能水平及傾斜的運動,用于將六角螺母傾倒。本發明通過脹管夾持在C形夾內,實現轉動,同時控制臂呈傾斜至水平的變化,將六角螺母與沉頭螺栓配合,實現完成加工,后續被擋板擠壓出,控制臂從傾斜至水平狀再到傾斜的后一秒,轉盤轉動,使位置傳感器檢測到,控制臂再次進行一個周期的運動,實現不斷進行將六角螺母與沉頭螺栓配合。
技術研發人員:翁小琴
受保護的技術使用者:浙江通納精密材料科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!