一種高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚的應(yīng)用
本發(fā)明涉及水凝膠電子皮膚,具體涉及一種高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚的應(yīng)用。
背景技術(shù):
1、隨著人工智能和自動(dòng)化技術(shù)的飛速發(fā)展,機(jī)器人在工業(yè)、醫(yī)療和服務(wù)等領(lǐng)域的應(yīng)用日益廣泛,顯著提升了生產(chǎn)效率,并在醫(yī)療康復(fù)、家政服務(wù)、教育等方面展現(xiàn)出巨大潛力。然而,當(dāng)前機(jī)器人與人類及復(fù)雜環(huán)境互動(dòng)時(shí)仍面臨諸多挑戰(zhàn),尤其是在觸覺感知和柔性操作方面。與人類相比,機(jī)器人在感知能力上存在較大差距,這在復(fù)雜環(huán)境中的精準(zhǔn)控制和細(xì)致操作中尤為明顯,特別是在腦機(jī)接口、神經(jīng)假肢、臨床設(shè)備、可穿戴技術(shù)和虛擬現(xiàn)實(shí)等應(yīng)用領(lǐng)域。目前機(jī)器人大多基于金屬、陶瓷和塑料等硬質(zhì)材料構(gòu)建,雖然具備足夠的機(jī)械強(qiáng)度和耐用性,但與生物組織的柔軟濕潤性存在本質(zhì)差異,無法提供靈敏的觸覺反饋,從而影響其操作的精確性和安全性。尤其是在與人類合作的場(chǎng)景中,缺乏柔性觸覺反饋的機(jī)器人容易產(chǎn)生不適應(yīng)甚至危險(xiǎn)的操作行為。人類皮膚具有獨(dú)特的力學(xué)特性和生物感知能力,這使得人類能夠在日常生活中靈活應(yīng)對(duì)外部環(huán)境的變化,精準(zhǔn)地完成各種操作任務(wù)。通過模仿這些特性,仿生皮膚材料可以有效提升機(jī)器人在復(fù)雜環(huán)境中的表現(xiàn),尤其是在醫(yī)療、服務(wù)等需要精細(xì)操作和人機(jī)互動(dòng)的領(lǐng)域,具有廣泛的應(yīng)用前景。為機(jī)器人賦予類似人類皮膚的力學(xué)特性和觸覺功能,已成為提升其智能化水平的關(guān)鍵研究方向。
2、現(xiàn)有的仿生皮膚大多基于彈性體材料。彈性體材料具有較好的機(jī)械性能,尤其在拉伸性和耐久性方面表現(xiàn)優(yōu)異,能夠模仿人類皮膚的力學(xué)特性。然而,其生物相容性較差,透氣性不足,長時(shí)間使用容易引起刺激或不適。相比之下,水凝膠作為一種新型的柔性材料,憑借其高含水量、柔軟性、透氣性和良好的生物相容性,能夠更舒適地貼合人體皮膚或機(jī)器人表面。其中,導(dǎo)電水凝膠因其同時(shí)具備柔軟性和導(dǎo)電性,在觸覺傳感領(lǐng)域展現(xiàn)了巨大潛力。其柔軟性使其能夠自適應(yīng)機(jī)械應(yīng)力或形變,與復(fù)雜表面貼合良好;通過引入金屬顆粒、導(dǎo)電聚合物或?qū)щ娂{米粒子等導(dǎo)電組分,水凝膠可以通過電阻變化感知應(yīng)變或應(yīng)力,并將機(jī)械信號(hào)轉(zhuǎn)化為電信號(hào)。
3、然而,水凝膠的機(jī)械性能遠(yuǎn)遜于彈性體,在復(fù)雜操作環(huán)境下難以承受較大的機(jī)械應(yīng)力,成為其在仿生皮膚應(yīng)用中的主要瓶頸。因此,如何設(shè)計(jì)并制備兼具良好的力學(xué)性能和靈敏傳感性能的高強(qiáng)度導(dǎo)電水凝膠,成為實(shí)現(xiàn)高靈敏度觸覺反饋功能電子皮膚的關(guān)鍵問題。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明的目的在于解決上述技術(shù)問題,提供一種高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚的應(yīng)用。該材料在保留水凝膠柔軟性、透氣性和良好的生物相容性的基礎(chǔ)上,顯著提升了其機(jī)械性能,能夠與人體皮膚或機(jī)器人表面形成良好的貼合,同時(shí)兼具柔性和強(qiáng)度,適合在復(fù)雜環(huán)境中的應(yīng)用需求。與此同時(shí),該材料表現(xiàn)在優(yōu)異應(yīng)力應(yīng)變傳感靈敏度,可精確檢測(cè)抓取物體過程中的微小形變變化,并有效識(shí)別不同的物體,因此,可應(yīng)用為高性能觸覺傳感電子皮膚。
2、本發(fā)明采用的技術(shù)方案是:一種高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚的應(yīng)用,該水凝膠能夠與人體皮膚或機(jī)器人表面緊密貼合,并具有觸覺反饋功能。
3、優(yōu)選地,將所述高強(qiáng)度導(dǎo)電水凝膠與人體皮膚或機(jī)器人表面直接貼合,用于監(jiān)測(cè)人體或機(jī)器人運(yùn)動(dòng),所述運(yùn)動(dòng)包括機(jī)械手指的抓物、取物及運(yùn)輸動(dòng)作;識(shí)別不同大小的物體;在應(yīng)變?yōu)?0%的條件下,能夠重復(fù)使用1600次。
4、優(yōu)選地,所述水凝膠的彈性模量為0.3mpa,拉伸強(qiáng)度為2.1mpa,斷裂伸長率到950%。
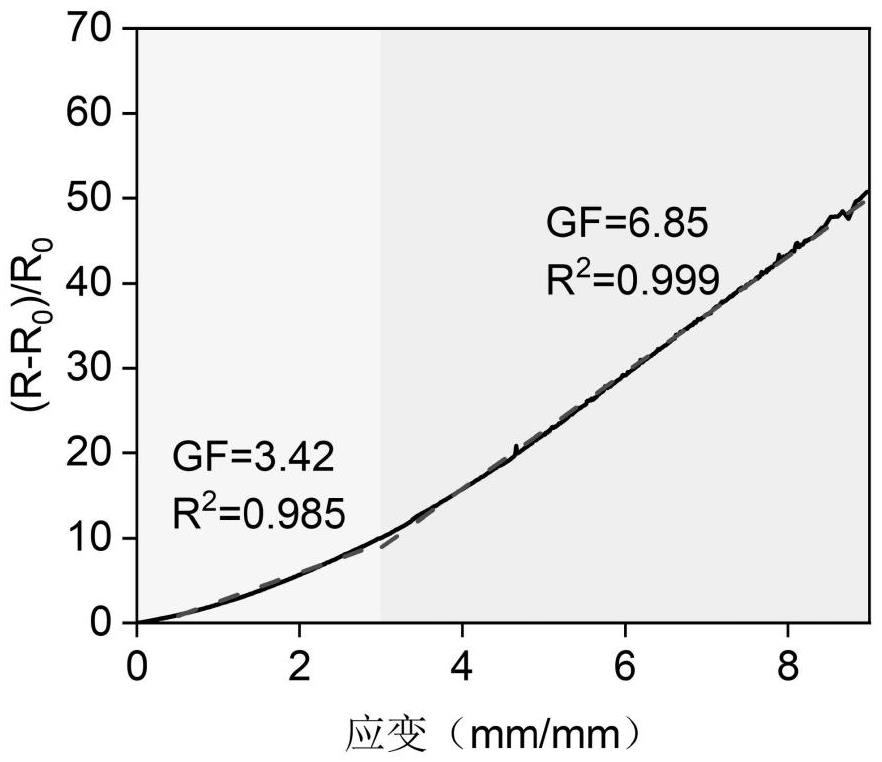
5、優(yōu)選地,所述水凝膠的靈敏度系數(shù)范圍為3.4-9.0。
6、進(jìn)一步優(yōu)選,所述高強(qiáng)度導(dǎo)電水凝膠的制備方法包括以下步驟:
7、s1、將irgacure?819(0.02mol%,相對(duì)于丙烯酸甲酯),1,6-己二醇二甲基丙烯酸酯(0.36mol%,相對(duì)于丙烯酸甲酯)和丙烯酸甲酯混合均勻,得到溶液a;
8、s2、將1g丙烯酰胺,導(dǎo)電組分(0.15-1.5mg/ml,相對(duì)于水)和2ml含有1%v/v?tween80的水溶液渦旋混合均勻,得到溶液b;
9、s3、將溶液a、溶液b按照體積比1:3混合均勻,注入到模具中,引發(fā)聚合,即可得到高強(qiáng)度導(dǎo)電水凝膠。
10、進(jìn)一步優(yōu)選,所述導(dǎo)電組分為pedot:pss,炭黑,石墨烯,碳納米管或無機(jī)鹽中的一種。
11、更進(jìn)一步優(yōu)選,所述模具為與人體或機(jī)器人需要監(jiān)測(cè)的運(yùn)動(dòng)部位表面對(duì)應(yīng)的三維空腔模具,包括手指或腳趾對(duì)應(yīng)的指模或趾模,手掌或腳掌對(duì)應(yīng)的手模或腳模。
12、本發(fā)明所具有的有益效果:
13、1、本發(fā)明制備了一種高強(qiáng)度導(dǎo)電水凝膠,并將其應(yīng)用為電子皮膚,緊密貼合于機(jī)械手指表面。該電子皮膚具有優(yōu)異的力學(xué)性能,彈性模量為0.3mpa,拉伸強(qiáng)度為2.1mpa,斷裂伸長率可達(dá)950%。同時(shí),其靈敏度系數(shù)高達(dá)9.0。
14、2、本發(fā)明中的水凝膠電子皮膚能夠與機(jī)械表面或人體皮膚緊密貼合,具備優(yōu)異的觸覺反饋功能。它可識(shí)別機(jī)械手指的抓取動(dòng)作,并監(jiān)測(cè)抓物,取物和運(yùn)輸過程;識(shí)別不同大小的物體;且在應(yīng)變?yōu)?0%的條件下,重復(fù)使用次數(shù)高達(dá)1600次。
15、3、本發(fā)明中的水凝膠電子皮膚制備方法簡(jiǎn)單易行,操作簡(jiǎn)單,適合大規(guī)模工業(yè)化生產(chǎn)。
技術(shù)特征:
1.一種高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚的應(yīng)用,其特征在于,所述高強(qiáng)度導(dǎo)電水凝膠能夠與人體皮膚或機(jī)器人表面緊密貼合,具有觸覺反饋功能。
2.根據(jù)權(quán)利要求1所述的應(yīng)用,其特征在于,將所述高強(qiáng)度導(dǎo)電水凝膠與人體皮膚或機(jī)器人表面直接貼合,用于監(jiān)測(cè)人體或機(jī)器人運(yùn)動(dòng),所述運(yùn)動(dòng)包括機(jī)械手指的抓物、取物及運(yùn)輸動(dòng)作;識(shí)別不同大小的物體;在應(yīng)變?yōu)?0%的條件下,能夠重復(fù)使用1600次。
3.根據(jù)權(quán)利要求1所述的應(yīng)用,其特征在于,所述水凝膠的彈性模量為0.3mpa,拉伸強(qiáng)度為2.1mpa,斷裂伸長率到950%。
4.根據(jù)權(quán)利要求1所述的應(yīng)用,其特征在于,所述水凝膠的靈敏度系數(shù)范圍為3.4-9.0。
5.根據(jù)權(quán)利要求1所述的應(yīng)用,其特征在于,所述高強(qiáng)度導(dǎo)電水凝膠的制備方法包括以下步驟:
6.根據(jù)權(quán)利要求5所述的應(yīng)用,其特征在于,所述導(dǎo)電組分為pedot:pss、炭黑、石墨烯、碳納米管、無機(jī)鹽中的一種。
7.根據(jù)權(quán)利要求5所述的應(yīng)用,其特征在于,所述模具為與人體或機(jī)器人需要監(jiān)測(cè)的運(yùn)動(dòng)部位表面對(duì)應(yīng)的三維空腔模具,包括手指或腳趾對(duì)應(yīng)的指模或趾模,手掌或腳掌對(duì)應(yīng)的手模或腳模。
技術(shù)總結(jié)
本發(fā)明中公開了一種高強(qiáng)度導(dǎo)電水凝膠,并將其應(yīng)用于電子皮膚,直接與人體皮膚和機(jī)器人表面緊密貼合。該電子皮膚具備優(yōu)異的力學(xué)性能,彈性模量為0.3MPa,拉伸強(qiáng)度為2.1MPa,斷裂伸長率達(dá)到950%。此外,它還具有高靈敏度系數(shù)的觸覺反饋功能,靈敏度系數(shù)為9.0,能夠有效監(jiān)測(cè)人和機(jī)器人的關(guān)節(jié)運(yùn)動(dòng)。在應(yīng)變?yōu)?0%的條件下,該水凝膠的重復(fù)使用次數(shù)可達(dá)1600次,并且具有良好的生物安全性。因此,應(yīng)用該高強(qiáng)度導(dǎo)電水凝膠作為電子皮膚,不僅能賦予機(jī)器人類似人類皮膚的柔韌性,還能顯著提高機(jī)器人的觸覺感知能力,增強(qiáng)其在人機(jī)交互等復(fù)雜環(huán)境下的靈敏性和安全性。
技術(shù)研發(fā)人員:李建樹,羅張杰,劉星宇,陳紅,丁春梅
受保護(hù)的技術(shù)使用者:四川大學(xué)
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!