復式油門剎車系統的制作方法
本發明涉及汽車及其配件制造領域,具體涉及現有的油門和剎車系統存在的系列問題,特別涉及如何解決誤踩油門踏板、切換速度、駕駛疲勞等系列問題。發明新的油門剎車系統,除需要機械原理與結構的相關知識外,還需要深入理解邏輯分析、數字電子時序分析等相關電子行業的知識,并具備發散思維和設計能力,乃至對哲學邏輯有深刻的理解才能產生本發明的靈感。申請人雖為光電科技公司,但本發明所需的跨行業的相關知識正是本發明人所擅長和長期鉆研與積累所覆蓋范圍。同時,本公司致力于城市亮化與車輛交通配套,所以,光電科技公司發明油門剎車系統也就不足為奇了。
背景技術:
1、1886年,在卡爾·本茨多年努力下,全球第一臺汽車誕生;1899年和1902年,威廉·邁巴赫和威廉·蘭徹斯分別發明了鼓剎和碟剎。經過幾十年的發展,逐漸形成現有的油門剎車方式,并一直沿用至今。該方式是把剎車踏板(brake?pedal,簡稱剎車或腳剎)和油門踏板(accelerator?pedal,簡稱油門)左右排列,并分布于右腳附近,右腳在油門和剎車之間左右來回踩踏切換實現加速和制動操作。可操作的制動方式分為行車制動(servicebrake)和駐車制動(parking?brake),本案討論的剎車和腳剎,指的是通過踩踏剎車踏板的行車制動,而駐車制動,也分為用腳操作的駐車制動(俗稱“腳剎”)和用手操作的駐車制動(俗稱“手剎”),本案中討論的駐車制動,使用手剎(hand?brake),不用“腳剎”,以免混亂。
2、現有的油門剎車系統,明顯的優點是利用了普通人本能的最直接、最易發力的踩踏力量來控制油門和剎車。在四肢中,下肢無論是粗細還是長短都優于手臂,腳部向下向前的踩踏力量有著行程長、力量大的優點,而且,右腳又是絕大多數人習慣用力的腳。因此,利用右腳的踩踏力量控制油門和剎車,用雙手操控方向和手剎,似乎成為汽車完美的操控方式了。但是,也正是這種方式的明顯優點帶來了另一個明顯的缺點,就是油門和剎車都是向下踩踏,又緊挨著,即便老司機,在疲勞或者懈怠的情況下,甚至緊急情況下,踩剎車時踩滑,都可能踩錯油門,因此,現有的油門剎車系統存在著嚴重的安全隱患。
3、現在,把現有的油門剎車系統放入xyz三維坐標系中進行矢量分析,從空間矢量的角度分析右腳300在油門200p和剎車100之間來回切換時的切換軌跡、切換時間、踩踏準確性、誤踩油門、駕駛疲勞等一系列問題,進一步說明各種問題產生的原因,其中,油門200p的結尾p為“踏板”的英文pedal的第1個字母,以說明是現有的踩踏方式的油門控制器。
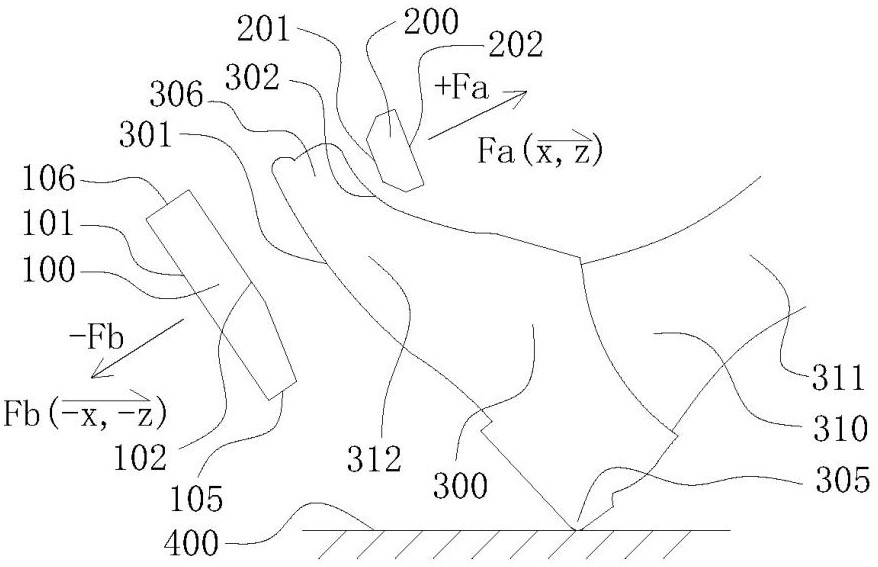
4、參見圖1(a)(b),為三維空間坐標中,現有的油門剎車系統右腳在踏板之間切換操作方式示意圖。x軸正方向,朝內,面向駕駛員方向;x軸負方向,朝外,駕駛員視線方向;z軸正方向,朝上;z軸負方向,朝下;y軸正方向,朝右;y軸負方向,朝左。車內地板400位于z軸等于零時xy平面所在位置。圖中虛線形狀表示右腳300在油門200p和剎車100之間來回切換時踩踏的位置,有兩種切換方式:第一種,參見圖1(a),右腳300在油門200p與剎車100之間整體移動踩踏;第二種,參見圖1(b),右腳300腳跟305固定在車內地板400表面,僅腳掌312部分在油門200p和剎車100之間左右移動踩踏。很多情況下,是兩種方式的混合。無論哪種方式,右腳300都是在三維空間中來回切換,油門200p和剎車100之間可能會有高低不同,一般都是油門200的位置低于剎車100,但都是以踏板形式左右平行排列。切換時,右腳300需要從油門200p抬起,再運動到剎車100的上方再踩下,需要經過一個弧形運動軌跡才能完成一次剎車動作的切換。這種弧形運動軌跡,無論從幾何學公理“兩點之間線段距離最近”的角度來看,還是從駕駛實踐來看,都會增加切換軌跡,延遲反應時間,不易踩準踏板。特別是遇到突發情況時,可能0.1秒的延遲,結果完全不同;甚至踩滑了,踩到油門,后果更是不可設想。
5、行駛時,油門踏板200p上因右腳300踩踏產生的受力f和右腳300的施力f相等,是有方向的矢量。從作用上來講,是控制油門的力,簡稱油門力;從施力方式來講,是通過踩踏控制油門踏板,簡稱踩踏力;該力朝向x軸和z軸負坐標方向,即朝下和朝外方向。受力f或施力f是油門和剎車受力和腳部施力的統稱;在具體考慮施力方式或施力作用時,記作踩踏力fa(-x,-z)或油門力fa(-x,-z)。在圖中,用頂部箭頭表示矢量,用文字表述時,箭頭丟失,簡化為-fa、踩踏力-fa或油門力-fa。簡單用等式f=-fa,表示施力f,朝向x軸和z軸負方向,是通過踩踏控制油門的力。
6、制動時,剎車踏板100因右腳300踩踏產生的受力f和右腳的施力f相等,也是有方向的矢量。從作用上來講,是控制剎車的力,簡稱剎車力;從施力方式來講,是通過踩踏控制剎車踏板,也簡稱踩踏力;該力朝向x軸和z軸負坐標方向,也即朝下和朝外方向。受力f或施力f是油門和剎車受力和腳部施力的統稱;在具體考慮施力方式或施力作用時,記作踩踏力fb(-x,-z)或剎車力fb(-x,-z)。在圖中,用頂部箭頭表示矢量,用文字表述時,箭頭丟失,簡化為-fb、踩踏力-fb或剎車力-fb。簡單用等式f=-fb,表示施力f,朝向x和z負方向,是通過踩踏控制剎車的力。
7、下面,先從施力f與y軸的關系上,再從施力f作用下車速v和時間t關系上分析現有油門剎車系統存在的問題。
8、參見圖2(a),為現有的油門剎車系統,剎車和油門的大小和施力f在y軸上的分布圖,由于剎車和油門力量的大小和踏板的行程呈正比,也是踏板行程在y軸上的分布圖。
9、從施力f在y上的位置看,-fb和-fa分開一段距離,都是負值,也意味著每次踩踏切換都必須從一個負值的狀態,先回到零點,經過一段距離后,再踩踏進入另一個負值的狀態,這樣,勢必會延長油門和剎車之間的切換時間和速度。
10、從施力f符號角度看,-fb和-fa全部為負值,方向相同,全部為踩踏力,兩個符號相同的矢量,卻要進行制動與加速這兩個相互矛盾的操作,必然導致誤踩油門問題的發生,只要條件滿足必然觸發。而且,y軸下方的剎車和油門位置都被負值的踩踏力全部占滿,無法在負值方向再增加備用剎車,設想一下,如果在y軸上負值方向增加備用剎車踏板,變成三踏板,更容易產生誤踩油門的事故。而且,-fb和-fa符號相同,全是踩踏力,還會導致腳部疲勞,進而產生駕駛疲勞。
11、參見圖2(b),為現有的油門剎車系統,在施力f的作用下,車速v與時間t的關系圖。其中,車速v(f)是施力f的函數,施力f包括油門力-fa和剎車力-fb,均為負值。行駛時,踩踏力-fa絕對值大小決定著加速的快慢或勻速大小,踩踏力-fb絕對值大小決定減速快慢。在每個切換時刻t本應有線段對應到施力f和速度v曲線上,為使圖形易于辨識,省略了這些線段,下同。圖中曲線共分p0~p8九個階段曲線,大致表現了現有的油門剎車系統整個駕駛過程。p0,啟動,松手剎(hand?brake);p1,f=-fa(踩油門),v=v(-fa);p2,燃油車(滑行),電動車(動能回收kers);p3,f=-fb(踩剎車),v=0;p4,r檔倒車,f=-fa(踩油門),v=-v(-fa);p5,f=-fb(踩剎車),v=0,手剎駐車;p6,松手剎,f=-fa(踩油門),v=v(-fa);p7,下長坡,f=-fb(踩剎車),減速,隨后,剎車失靈,f=-fb(踩剎車),v不減反增;p8,拉手剎,v緩慢減小。
12、從圖中-fa和-fb的分布可見,施力f包括-fa和-fb,兩者符號相同,都是踩踏力,全部分布在時間t軸的下方,也就是說,頻繁的施力f全部為踩踏力,動作方向相同,只是踩踏位置和力度不同。在整個駕駛過程中,除了拉手剎外,只要駕駛上路,要么用-fa踩油門,要么用-fb踩剎車,無論f=-fa還是f=-fb,使用的都是相同肌肉群。而且,向下踩踏能夠提供的力量很大,而油門控制并不需要這么大的力量,需要與踩踏相關的肌肉群保持緊張以便提供適合的踩踏力度,才能獲得適合的油門和速度。這樣,隨著時間t的增加,與踩踏相關的肌肉群持續操作,控制這些肌肉群的大腦始終處于緊張狀態,沒有休息時間。只要駕駛時間稍長,腳就想離開踏板休息一會。只有經過長期駕駛歷練的老司機,與踩踏相關的肌肉群足夠發達,有足夠的抗疲勞能力,才能勝任長時間的駕駛任務。因此,才會有定速巡航功能按鍵的產生,其目的就是為了緩解持續緊張的油門踩踏導致的疲勞,讓相關的肌肉群獲得一定的放松休息。畢竟路況千變萬化,能夠長時間使用定速巡航的理想路況非常稀少,這便是現有的油門剎車系統容易產生疲勞的主要原因。
13、與現有油門剎車系統相關的故障中,最嚴重的是剎車失靈。剎車失靈的原因很多,從剎車踏板經過管路等部件到達剎車鉗和剎車片之間任何一個環節出問題,還有行駛時忘松手剎、下長坡等原因,都容易導致剎車失靈,特別是大貨車自身加貨物整體重量遠大于小汽車更容易發生。因缺少備用剎車,當腳剎失靈時,只能借助剎車力量較弱的手剎,乃至通過剮蹭道路護欄減速。圖2(b),p7階段正是反應了下長坡時剎車失靈的情況,此時,因沒有備用剎車,只能借助手剎減速制動,p8采用手剎制動緩慢降速,但啟用手剎時,需要右手脫離方向盤,這會影響駕駛的平穩。按講,增加一個備用剎車踏板并不難,但是,無論從圖2(a)中的f和y的關系分析,還是從實際情況來看,這都會導致右腳控制三個踏板的尷尬局面,將更容易發生誤踩油門的事故,所以,現有油門剎車系統是不太可能增加備用腳剎的!另外,由于手剎獨立于腳剎之外,不像腳剎和油門那樣頻繁操作,特別是遇到突發事件、欣賞美景等原因需要臨時下車,或著急出門、接到催促電話等原因,注意力集中在與駕駛無關的事情時,很容易導致行駛時忘松手剎、停車時忘拉手剎,前者導致車輛損毀,后者導致溜車事故。
14、隨著汽車的普及,特別是新能源汽車快速發展,誕生了很多與剎車有關的功能,例如,上坡輔助hsa(hill?start?assist)功能,是在上坡起步時,保持短時的剎車防止向后溜;自動駐車(auto?hold)功能,在停車時,自動保持剎車,啟動時,自動松開剎車,但是,這些功能要么需要使用條件,要么一直打開會傷車或增加油耗,要么開啟或關閉,并不能人為精細控制,并不能直接通過油門和剎車的操作自然而然地防止溜車和自動駐車。
15、如何才能在已經非常成熟的汽車制造技術領域,發明一種能既能解決錯誤踩踏油門,有效防呆,又能提高踩踏油門和剎車的準確性,同時,能夠減少保持油門時的肌肉緊張,降低駕駛疲勞,而且,還能減少從油門轉換到剎車的路徑和時間,并且,在不增加操作復雜程度的情況下,擁有備用剎車踏板,在緊急情況下實現備用剎車和雙重剎車。進一步,還能解決行駛時忘松手剎、停車時忘拉手剎的問題,因此,必須突破現有油門剎車系統思路,對現有油門剎車方案做徹底創新思考才能有新的突破。
技術實現思路
1、本發明目的在于提供一種復式油門剎車系統,以解決現有的油門剎車系統容易誤踩油門的問題,從而獲得一種安全防呆,不用擔心踩踏錯誤,能夠避免乃至完全杜絕誤踩油門的問題,即便踩錯油門也不會加速的新型油門剎車系統。
2、本發明目的還在于提供一種復式油門剎車系統,以解決現有的油門剎車系統沒有備用腳剎的問題,從而在不增加剎車踏板的情況下,獲得一種結構設計科學,操作簡單容易,具有備用剎車功能的新型油門剎車系統。
3、本發明目的還在于提供一種復式油門剎車系統,以解決現有的油門剎車系統右腳在油門與剎車切換不易踩準踏板中心的問題,從而獲得一種切換時踩踏準確、著力點不易偏移的新型油門剎車系統。
4、本發明目的還在于提供一種復式油門剎車系統,以解決現有的油門剎車系統右腳在油門與剎車之間切換路徑為空間曲線的導致的切換距離和時間較長的問題,從而獲得一種在油門和剎車切換距離和時間更短的新型油門剎車系統。
5、本發明目的還在于提供一種復式油門剎車系統,以解決現有的油門剎車系統右腳頻繁持續踩踏導致的腳部疲勞導致的駕駛疲勞問題,從而獲得一種相關的肌肉群和大腦相關控制區域不易疲勞,進一步,還可實現具有速度動態可調的定速巡航功能的新型油門剎車系統。
6、本發明目的還在于提供一種復式油門剎車系統,以解決現有的油門剎車系統存在的上坡啟動溜車、手剎忘記操作的問題,從而在不增加剎車踏板和相關按鍵的情況下,甚至采用多合一方式,獲得一種結構科學合理,操作簡單容易,能夠實現上坡啟動不溜車、自動剎車、自動駐車功能的新型油門剎車系統。
7、為實現上述目的,早在十年前就思考過相關問題了。隨著互聯網和手機的普及,經常在網絡媒體和微信上看到誤踩油門、剎車失靈等事故視頻。每個事故視頻都刺激著通過發明改變世界的神經,每次看到大貨車剎車失靈導致的慘烈事故,都會激發通過發明來改變現狀的決心。偶然的一天晚上,左腳腳背被蚊子叮咬后,下意識地用右腳后跟放在左腳腳背來回撓癢,突然靈感迸發,意識到好像找到了解決現有油門剎車問題的方法了。逐步深入思考,再對最新的新能源汽車油門剎車相關問題進一步了解,經過多角度多方位的分析思考和模擬試驗,再深入分析腳部踩踏力和回拉力的特點,初步確定了操作的可行性。隨著思考和分析的深入,靈感不斷閃現,在逐步細化的過程中,產生了解決切換距離和時間、踩踏準確性、駕駛疲勞等問題的靈感。再進一步深入,又產生了備用剎車和雙重剎車、自動拉手剎和自動松手剎等靈感。思路逐步清晰,方案逐步完整,形成了以下解決系列問題的方案。
8、如圖3所示,為本發明的復式油門剎車系統(簡稱本發明),其原理是,把現有的油門踏板200p改為油門橫桿200(簡稱油桿200),并置于剎車踏板100(簡稱仍未剎車100)之上,形成上下錯落的復式結構。工作狀態時,腳掌312置于油桿200和剎車踏板100形成的上下復式結構之間。
9、行駛時,完全不同,不是現有的踩踏方式,而是采用回拉的方式控制油門。具體方式是,腳背302與油門橫桿的底部201(簡稱油桿底部201或油桿底面201)接觸,通過腳部300與腿部311形成的鋤頭形狀鉤住油桿200向內向上回拉來完成油門控制。而且,油桿200的形狀與現有的油門踏板200p也有很大的不同,不再是為了方便踩踏,而是為了方便腳背302鉤住油桿200,制成桿狀并橫放。
10、制動時,與現有的踩剎車踏板100的方式相同,可能剎車踏板100的高低位置,為了適應油桿200的回拉有所調整,仍然通過踩踏完成剎車操作。
11、現在,把本發明放到xyz三維空間坐標中進一步說明,如圖4(a)所示,為本發明的油桿200、剎車100和右腳300在三維坐標中的位置關系圖,所用空間坐標系不變,與圖1相同,不再贅述。圖中虛線輪廓為右腳300所在的位置,因右腳300在油桿200和剎車100之間來回切換軌跡短,難以用圖形表示清楚,只畫了一個腳部輪廓虛線。這也是本發明的優勢所在:右腳300在油門和剎車之間的運動軌跡,從現有在xyz三維空間中左右切換的弧線軌跡,變成本發明在xz二維平面內的上下切換的直線軌跡;右腳300切換運動由三維空間變為二維空間,運動維度降低,移動距離縮短。由幾何學公理“兩點之間線段距離最近”可知,此時的切換軌跡和切換時間最短,而且,切換軌跡由xyz三維空間變為xz二維平面后,踩踏不準的問題自然而然就徹底解決了。
12、行駛時,油桿200因回拉產生的受力f和右腳300的施力f相等,是有方向的矢量,從作用上來講,是控制油門的力,簡稱油門力;從施力方式來講,是通過回拉控制油門,簡稱回拉力;該力位于xz二維平面內,朝向x軸和z軸正坐標方向,即朝上和朝內方向。受力f或施力f是油門和剎車受力和腳部施力的統稱;在具體考慮施力方式或施力作用時,記作踩踏力矢量fa(x,z)或油門力矢量fa(x,z)。在圖中,用頂部箭頭表示矢量,用文字表述時,箭頭丟失,簡化為+fa、回拉力+fa或油門力+fa,在無需強調正負號時,正號可省略。圖中油門力+fa有兩個箭頭,表示可以根據需要把油門力+fa設計成由水平向內、垂直向上復合成的不同的方向。用f=+fa表示施力f朝向xz所在平面正軸方向,通過回拉控制油門的力。
13、制動時,與現有的剎車踏板100相同,踩踏力矢量和剎車力矢量,簡化為-fb、踩踏力-fb或剎車力-fb,不再贅述。
14、由力的矢量分析可知,本發明采用了+fa與-fb兩個相反方向的力來處理加速與制動這兩個相互矛盾的操作,從而在根本的邏輯關系上徹底解決了誤踩油門的問題。
15、關于回拉力控制油門的可行性,見圖4(b),為人類最基本的直立本能時的情況;自從進化到人類后,直立行走就伴隨著人類的每一天。當自然站立時,腳部與腿部之間自然會成為近似直角,形似鋤頭,并不需要訓練即可輕松完成,這就為通過腳部的回拉力輕松控制油門提供了生理基礎。與油桿底部201接觸的是腳趾根到腳背附近的區域,考慮到行走,一般的鞋子都會在這個附近考慮彎曲,會有過渡銜接使鞋子前端稍微上翹,這就為更好地鉤住油桿200創造了條件。
16、油桿200的回拉動作時,把腳跟305放在車內地板400上,以地板400作為支點,以腳踝310為軸,通過腳掌312上下運動回拉油桿200來控制油門大小;當需要增加行程時,稍微移動腳跟305即可;當需要踩踏剎車100時,小幅度的減速腳跟305可以不動,腳掌312向下踩踏;當需要大幅度的踩踏時,只需腳跟305離開車內地板400進行踩踏即可。腳部300各部分的運動沒有多余動作,回拉油桿200和踩踏剎車100的動作直接快捷。
17、之所以用腳部表述,而不用鞋部表述的原因在于,鞋子有不同款式,是可以改變的,而腳只有與生俱來的款式的,是不能改變的,只要腳部動作可行,通過鞋子的操作就可行。換一種說法,鞋子的運動都以為腳部的運動為基礎,腳部才是根本,鞋子可以理解為裝在腳部的套子,腳部只是相差一層鞋子的布料或皮革而已。
18、因為鞋子是可以改變的因素,所以,必要時還可以通過定制駕駛專用鞋、專用鞋套、附加鞋背等方法,利用不同材料的摩擦和順滑特性,再配合腳部與腿部形成的鋤頭形狀更好地鉤住油桿200,并通過腳背302把回拉力傳遞到鞋面順利地拉動油桿200,必要時可以增加腳尖306部分對應鞋面的翹起。還可以增加可安裝的油桿底部附件257,該附件,是以與腳背302所在位置的鞋面匹配的曲線為母線258,以油桿200軸心為圓心,進行旋轉的旋轉體,或者,能夠與鞋面更好匹配的曲面。該旋轉體或近似旋轉體表面能夠與鞋面形狀更好匹配,用以增加腳背302的舒適度,減少對鞋面的磨損。該附件可以采用不同軟硬的材料,還可以設計成不同的形狀,以適應不同用戶的喜好,不同腳的大小。當然,該附件也可以與油桿200做在一起,成為油桿200的一部分。總之,該附件需要既能使腳背302的回拉力順利地傳遞給油桿200,又能迅速脫離油桿200進入踩踏剎車狀態。至于與油桿200相連的杠桿機構、機械傳動,必要時增加的電子部分都是對油桿200位置變化的傳導,為現有的技術和方法,在此不必贅述。
19、上述的向內向上的回拉動作的方向,可根據駕駛室空間大小、司機坐姿高低、腳的大小、腿的長短、性別的差異,喜好的不同、腳部輔助支撐等情況有所偏向,一般是向上向內的混合方向,最終以安全舒適,減少腳部疲勞為目標。如果駕駛位比較高,例如公交車、大貨車,以向上為主;如果駕駛位比較低,例如家用汽車,向內多一些,向上少一些;如果駕駛位很低,例如跑車、賽車,向內偏向,甚至水平向內。作為對比,同樣把本發明的復式油門剎車系統放入xyz三維坐標系中,從空間矢量的角度分析本發明工作時,右腳300在油桿200和剎車踏板100切換時的切換軌跡、切換時間、踩踏準確性、誤踩油門、駕駛疲勞的變化情況,進一步說明本發明的優勢所在。
20、本發明的另一個優勢是可以減少腳部疲勞。
21、首先,通過列表對比分析腳部對外的施力f特點,腳部對外施力f與本發明相關的力包括回拉力與踩踏力。如附表1所示,踩踏力的特點是力量大、行程長,但需要小力量精細控制、持續保持恒定小量力時,相關肌肉群容易疲勞,當所需力量較大、并不需要精細控制時反而不容易疲勞,這些特點使得踩踏力更適合用于剎車。回拉力則有很大的不同,回拉力的特點是力量小、行程較短、小力量保持容易、不易疲勞、容易精細控制的特點,容易通過腳跟的支撐輕松保持所需的角度,這些特點正好適合持續頻繁且精力的油門控制。特別是新能源汽車采用電子油門,需要的回拉力很小,還可根據用戶體驗設計所需大小的回拉力。
22、進一步,還可以通過增加腳部輔助支持機構,例如可調前后位置、高低、抬升角度的無級定位機構、分段定位機構、可調踏板支撐機構等,在增加不同車型內部空間和座位不同高低的適應性的同時,進一步降低腳部疲勞,使腳部動作更加順暢,能隨時定位,并輕松順滑精細地調節油門大小,實現隨時可定速的可調定速巡航。這樣,就不再需要現有的定速巡航按鍵用于緩解腳部疲勞了。
23、本發明的另一個優勢是可以實現備用剎車或雙重剎車功能,而且,還可以在油門階段加入剎車階段,使油門橫桿擁有更多功能。
24、現在,從不同角度,先從施力f與xz軸,再從施力f作用下的車速v和時間t關系上,討論本發明解決駕駛疲勞、實現雙重剎車的原理,并進一步擴展油桿200的功能。
25、參見圖5(a),為本發明的復式油門剎車系統,油桿200和剎車100在xz軸上的位置與施力f(行程)的關系圖。因本發明為上下錯落的復式結構,腳部在油門和剎車之間切換的運動軌跡,由現有的xyz三維空間的左右切換,變為xz二維平面內的上下切換,帶來的系列優勢上面已說明。運動軌跡限定在二維平面后,剎車-fb和油門+fa在y軸上位置相同,無法在y軸上表現,而轉換為xz軸后,-fb和+fa則會出現在不同位置,又因施力f值在xz上是變化曲線,為便于分析,簡化成有寬度的空心框,并把xz二維平面壓縮成一根軸線,下同。此時,剎車-fb仍為踩踏力,為負值不變;油門+fa變為回拉力,變為正值,而下方負值區域為空,可放置剎車力-fbob用于備用剎車(backup?of?brake)。增加備用剎車后,意味著油桿200可具有油門剎車二合一功能,也即回拉是油門,踩踏是剎車。這樣,施力f,包括油門力+fa、剎車力-fb和備用剎車力-fbob。有了兩個剎車,成為雙重剎車系統后,平時只用常規剎車,必要時(如遇到剎車失靈)才啟動備用剎車。或在下長坡時,交替使用兩個剎車,避免剎車盤過熱導致剎車失靈。
26、現有新能源汽車的所謂單踏板模式中的動能回收kers系統,是通過把汽車滑行時的動能轉換成為電能達到節省電能、延長電池續航的目的。由于依靠踩踏力控制油門大小,在松開油門時,由于動能轉換成為電能,會有剎車效果,所以,很容易在遇到緊急情況時,誤用腳踩踏油門踏板來制動,從而導致事故的發生。采用本發明的油桿200回拉控制油門后,把起始位置改為動能回收kers后,油門不再與踩踏相關,完全杜絕了產生踩錯剎車隱患,徹底解決了誤踩油門的問題。
27、參見圖5(b),為本發明的復式油門剎車系統,在施力f的作用下,車速v和時間t的關系圖;車速v(f)是施力f的函數,施力f包括油門力+fa和剎車力-fb,兩者符號相反,方向相反。行駛時,回拉力+fa值大小決定著加速的快慢或勻速大小,踩踏力-fb絕對值大小決定減速的快慢。圖中曲線共分p0~p8九個階段曲線,大致表現了現有的油門剎車系統整個駕駛過程。p0,啟動,松手剎(hand?brake);p1,f=+fa(拉油桿),v=v(+fa);p2,燃油車(滑行),電動車(動能回收kers);p3,f=-fb(踩剎車),v=0;p4,r檔倒車,f=+fa(拉油桿),v=-v(+fa);p5,f=-fb(踩剎車),v=0,手剎駐車;p6,松手剎,f=+fa(拉油桿),v=v(+fa);p7,下長坡,f=-fb(踩剎車),減速,隨后,剎車失靈,f=-fb(踩剎車),v不減反增;p8,f=-fbob(踩踏油桿頂面剎車),v立刻降為零。在整個駕駛過程中,由于油門力+fa和剎車力-fb的方向相反,回拉油門+fa在上方,踩踏剎車-fb在下方,在t軸上交替分散分布,不再像現有的油門剎車系統(參見圖2)那樣全部位于t軸的下方,拉與踩時,腳部用力所需的相關肌肉群和大腦控制區域不同,兩者之間成為相互放松、相互休息的關系,相關的肌肉群和大腦相關的區域交替使用,交換休息,不易疲勞。
28、從上述施力f時間曲線可以看出,從駐車到啟動再到拉油門,必須有一個松手剎,駐車時也必須有一個拉手剎的操作,有這個操作就存在遺忘的問題。由于油桿200不再是與在地上走的鞋底接觸,不再需要承受可能很臟的鞋子的踩踏,而是與干凈的鞋面接觸,不用承受踩踏這么大的力量,就可以設計成精致輕便的桿狀或者有利于與鞋面配合的類桿狀,就可以在工作狀態之前增加準備狀態,處于準備狀態時,油桿200分布在剎車踏板100的周邊,在踩住剎車100或者踩一下油桿200,油桿200自動快速運動(或稱為加載)到腳背302之上,進入工作狀態;當腳離開剎車100和油桿200之間,短暫等待后,油桿200又會自動進入準備狀態。這樣就可以在解決遺忘手剎問題的同時,也增加了汽車的科技感和駕駛樂趣。
29、下面,看看是否可以把備用剎車功能變為常規剎車使用,或者,省略常規剎車踏板100,是否可以使油桿200成為油門剎車二合一油桿。
30、如圖6(a)所示,為本發明的復式油門剎車系統,省略剎車踏板后,油桿200在xz上的位置與施力f(行程)的關系圖。如圖6(b)所示,為省略剎車踏板后,施力f與車速v和時間t的關系圖。備用剎車力-fbob變成二合一剎車力-fb(2in1),此時,施力f包括+fa和-fb(2in1)。從圖中整個行駛過程來看,相當于把圖2(a)(b)所示的現有的油門剎車系統中的-fa變成+fa,-fa由橫軸的下方變為橫軸上方的+fa,省略剎車100,由油桿200二合一擔任全部油門剎車任務后,任然具有防止誤踩油門的優勢,但在從油門切換到剎車時,右腳要先從油桿底部201位置抽回,再抬起超過油桿200的高度,再踩踏油桿頂面202,在切換時間上,就不如直接從油桿底部201直接踩踏下面的剎車踏板100快捷。所以,剎車力-fbob更適合備用。
31、在繪制施力f與時間t的關系圖時,把油門力+fa曲線墊高,使剎車的-fb曲線放在墊高的油門力+fa曲線的下面,成為正值的剎車+fb。再把油門力+fa的初始點提高與正值的+fb連接后,原來在+fa和+fb連接處成為油門剎車的臨界點,這個臨界點(critical?point)就把+fa分為兩段:+fba剎車段和+faa加速段,中間為剎車油門臨界點(簡稱ba-p或c點)。原本在下方的負值剎車-fb移到正值區域后,下方負值區域留出了空位,用于放置剎車力-fbob,用于備用剎車。
32、參見圖7(a),為本發明的復式油門剎車系統,自動剎車、油門加速、備用剎車三合一的油桿200在xz上的位置與施力f的關系圖。油桿200的正值方向施力f有了剎車段、ba點交匯點(c點)、加速段后,便成為三個階段,分別取名為:油門內剎車階段pba(phase?ofbrake?in?the?accelerator),簡稱b段、剎車加速臨界點ba-p(brake?and?acceleratecritical?point),簡稱c段或c點、油門內加速階段paa(phase?of?accelerate?in?theaccelerator),簡稱a段。取三階段的中心詞的首字母,簡稱為bca三階段。圖中為了說明油桿200在不同位置剎車和油門大小,用橫線的疏密,并用英文大寫的最大(max)與小寫的最小(min)來表示值的大小。b-max,剎車最大值;b-min,剎車最小值,即為剎車零點;a-max,油門最大值;a-min,油門最小值,即為油門零點。
33、b段:+fa從零點(b-max)到c點(b-min),是第一階段。零點是油桿200行程的起點,也是剎車或駐車的終點。此時,腳部施力+fa為零,剎車力量最大(b-max),相當于剎車踏板踩到底;隨著+fa的增加,剎車力逐漸變小,直到c點(b-min,a-min);到達c點時,相當于傳統的剎車踏板的起點(b-min),同時,也是油門加速的起點(a-min);此時,剎車大小為零(b-min),油門大小也為零(a-min)。對于新能源車,可把此段作為動能回收kers,在實現減速的同時還實現了動能回收。
34、c段:+fa大小處于中間值,為第二階段。油桿200位于整個回拉行程中部,剎車變為零(b-min),加速也為零(a-min),為加速的零起點。
35、a段:+fa從c點(a-min)到最大值(a-max)之間的階段(+faa階段),是第三階段。油桿200從c點開始;隨著+fa值增加,速度增大;+fa越大,油門越大,車速越快;拉到底,+fa值最大,油門最大(a-max),車速達到最大值。
36、參見圖7(b),為在施力f的作用下,車速v在時間t軸上的變化情況。圖中曲線共分p0~p8九個階段曲線,大致表現了三合一油桿200的整個駕駛過程。p0,啟動,f=+fba(拉油桿),零點向c點,自動松手剎;p1,過c點加速,f=+faa(拉油桿),v=v(+faa);p2,回到c點,燃油車(滑行),電動車(動能回收kers);p3,f=+fba(松油桿),過c點減速到零點,v=0,自動剎車;p4,r檔倒車,f=+faa(拉油桿),v=-v(+faa);p5,f=-fba(松油桿),過c點減速到零點,v=0,自動駐車;p6,過c點加速,f=+faa(拉油桿),v=v(+faa);p7,下長坡,f=+fba,自動剎車,減速,隨后,遇到下坡剎車失靈,油桿回到零點,自動剎車無效,v不減反增;p8,f=-fbob,踩踏油桿頂面剎車,v立刻降為零。
37、有了b段后,無論是上坡還是平路,自然而然地實現了自動剎車、停車自動駐車,使得現有的上坡輔助hsa(hill?start?assist)和自動駐車(auto?hold)功能自然地融合在油桿200的控制范圍之內,并成為本發明的復式油門剎車系統的有機組成部分,就可以在剎車和油門控制過程中人為精細控制回拉快慢、力度、停留位置和時間,諸如停車忘拉手剎、開車忘松手剎、自動駐車常開可能傷車或油耗等一系列問題也就不存在了。
38、有了上述三個階段后,可通過油桿200在不同階段走不同的形狀路徑或不同的運動方式(繞軸旋轉、移動)方式讓腳部感知和區別不同階段的變化,也可避免由b段突然拉到a階段。例如,b段,以腳踝310為軸使腳背302向內向上拉油桿200;a段,變為水平向內回拉。為使運動順滑,還可使腳跟305搭在滑塊602上滑動。這樣,三個階段的油桿200運動路徑形狀為折線或彎曲。
39、關于本發明相關的中英文命名。因本發明的油門不再通過踩踏控制,而是通過回拉控制,所以,不能再叫油門踏板(accelerator?pedal)了。從有利于從頂面踩踏的角度考慮,可制成方巧克力形狀,英文可取名為accelerator?bar;從有利于鉤住油門,可制成橫放的圓桿狀,可踩踏與回拉交替使用,降低腳部疲勞的角度考慮,英文取名acceleratorperch,其中,英文perch,有鳥類棲木、棲息的含義。綜合考慮,中英名取名為油門橫桿(accelerator?bar)200或油門腳桿(accelerator?perch)200,簡稱油桿200。剎車踏板100,依然采用踩踏方式,仍用brake?pedal,仍簡稱剎車或腳剎。
40、復式油門剎車系統,改變了現有油門剎車系統的操作原理和工作邏輯,通過回拉與踩踏的配合,最大程度地發揮了回拉和踩踏各自的優點,避免各自的缺點,徹底解決了誤踩踏油門、切換速度、駕駛疲勞等一系列問題。如果再配合傳感器和電子線路乃至微處理器甄別油門回拉速度,判斷是否為非正常操作,就可更加放心操作。如果誤操作,汽車是不走的,自然而然地就會向回拉油門方式過渡,所以,無論新老司機都會很容易安全地擺脫原來的駕駛習慣。而且,復式油門剎車系統也很容易通過電子信息技術實現,也更符合新能源和智能汽車的發展方向。
- 還沒有人留言評論。精彩留言會獲得點贊!