車輛的控制方法、裝置、電子設備及車輛與流程
本申請涉及車輛管理,尤其涉及到一種車輛的控制方法、裝置、電子設備及車輛。
背景技術:
1、隨著科技的快速發展和進步,人工智能也在迅速發展。目前,傳統汽車產業以人工智能的發展為依托,正在大力研發無人駕駛技術,無人駕駛技術在減少駕駛員駕駛強度,提高駕駛安全性等方面的具有突出作用。
2、然而,無人駕駛車輛在現實駕駛場景中會遇到突然出現的障礙物或者其他干擾自動駕駛的長尾場景,目前無人駕駛車輛在應對這些無法避免的長尾場景時,還需要人工對這些無法避免的長尾場景做出決策,以保證車輛安全、平穩的通過這些長尾場景。
3、但此種人工決策的方法,需要駕駛人員一直保持關注路面,以便對突然出現的長尾場景快速做出決策,增大了駕駛員的駕駛強度,并且提高了由于駕駛人員對突然出現的長尾場景反應不及時而造成的事故率。
技術實現思路
1、有鑒于此,本申請提供了一種車輛的控制方法、裝置、電子設備及車輛,使得車輛在面對長尾場景時能夠自動做出決策,降低了駕駛員的駕駛強度,并且減少了由于駕駛人員對突然出現的長尾場景反應不及時而造成的事故率。
2、根據本申請的第一個方面,提供了一種車輛的控制方法,包括:
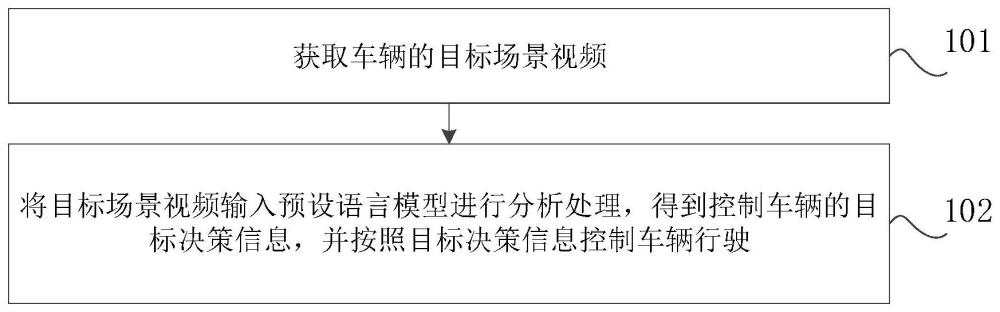
3、獲取車輛的目標場景視頻,所述目標場景視頻為所述車輛行駛在長尾場景下拍攝到的視頻;
4、將所述目標場景視頻輸入預設語言模型進行分析處理,得到控制所述車輛的目標決策信息,并按照所述目標決策信息控制所述車輛行駛。
5、根據本申請的第二個方面,提供了一種車輛的控制裝置,包括:
6、獲取模塊,用于獲取車輛的目標場景視頻,所述目標場景視頻為所述車輛行駛在長尾場景下拍攝到的視頻;
7、分析模塊,用于將所述目標場景視頻輸入預設語言模型進行分析處理,得到控制所述車輛的目標決策信息,并按照所述目標決策信息控制所述車輛行駛。
8、根據本申請的第三個方面,提供了一種計算機可讀存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現第一方面所述的車輛的控制方法。
9、根據本申請的第四個方面,提供了一種電子設備,包括存儲介質、處理器及存儲在存儲介質上并可在處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現第一方面所述的車輛的控制方法。
10、第五方面,本公開提供了一種車輛,包括:如第二方面所述的裝置,如第三方面所述的計算機可讀存儲介質,或如第四方面所述的電子設備。
11、借由上述技術方案,本申請提供的一種車輛的控制方法、裝置、電子設備及車輛,可獲取車輛的目標場景視頻,目標場景視頻為車輛行駛在長尾場景下拍攝到的視頻;將目標場景視頻輸入預設語言模型進行分析處理,得到控制車輛的目標決策信息,并按照目標決策信息控制車輛行駛。對于本公開實施例,通過獲取長尾場景下的目標場景視頻,并利用預設語言模型對目標場景視頻進行分析處理,得到控制車輛的目標決策信息,并按照目標決策信息控制車輛行駛,使得不需要駕駛人員一直保持關注路面,降低了駕駛員的駕駛強度,并且減少了由于駕駛人員對突然出現的長尾場景反應不及時而造成的事故率。
12、上述說明僅是本申請技術方案的概述,為了能夠更清楚了解本申請的技術手段,而可依照說明書的內容予以實施,并且為了讓本身取得上述和其他目的、特折和優點能夠更明顯易懂,以下特舉本申請的具體實施方式。
技術特征:
1.一種車輛的控制方法,其特征在于,包括:
2.根據權利要求1所述的方法,其特征在于,所述將所述目標場景視頻輸入預設語言模型進行分析處理,得到控制所述車輛的目標決策信息,包括:
3.根據權利要求2所述的方法,其特征在于,所述將多個所述第一權重值中第一權重值最大的場景物體信息,確定為目標障礙信息,包括:
4.根據權利要求2所述的方法,其特征在于,所述利用所述預設語言模型基于所述目標場景描述信息和所述目標障礙信息進行決策處理,得到控制所述車輛的目標決策信息,包括:
5.根據權利要求1所述的方法,其特征在于,所述預設語言模型的訓練方法,包括:
6.根據權利要求5所述的方法,其特征在于,所述確定所述車輛的樣本場景視頻,包括:
7.根據權利要求5所述的方法,其特征在于,確定所述樣本場景視頻對應的樣本目標障礙信息,包括:
8.根據權利要求7所述的方法,其特征在于,所述將多個所述第二權重值中第二權重值最大的樣本場景物體信息,確定為樣本目標障礙信息,包括:
9.一種車輛的控制裝置,其特征在于,包括:
10.一種計算機可讀存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現權利要求1至8中任一項所述的方法。
11.一種電子設備,包括存儲介質、處理器及存儲在存儲介質上并可在處理器上運行的計算機程序,其特征在于,所述處理器執行所述計算機程序時實現權利要求1至8中任一項所述的方法。
12.一種車輛,其特征在于,包括:如權利要求9所述的裝置,或如權利要求10所述的計算機可讀存儲介質,或如權利要求11所述的電子設備。
技術總結
本申請公開一種車輛的控制方法、裝置、電子設備及車輛,涉及車輛管理技術領域,包括:獲取車輛的目標場景視頻,目標場景視頻為車輛行駛在長尾場景下拍攝到的視頻;將目標場景視頻輸入預設語言模型進行分析處理,得到控制車輛的目標決策信息,并按照目標決策信息控制車輛行駛。本公開使得不需要駕駛人員一直保持關注路面,降低了駕駛員的駕駛強度,并且減少了由于駕駛人員對突然出現的長尾場景反應不及時而造成的事故率。
技術研發人員:邱實
受保護的技術使用者:北京羅克維爾斯科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!