道路坡度上在單踏板駕駛模式期間的控制的制作方法
本公開涉及補償重力的車輛扭矩控制。
背景技術:
1、電動化車輛(諸如純電動車輛和混合動力電動車輛)包括用于推進車輛的至少一個電機。電機由向電機供應能量的牽引電池供電,這會降低電池的荷電狀態(soc)。許多電動化車輛能夠通過將機械動力轉換成電力進行再生制動以對電池再充電。一些電動車輛提供單踏板駕駛。
技術實現思路
1、根據一個實施例,一種車輛包括動力裝置和控制器。控制器被編程為:響應于車輛在上坡坡度上而基于駕駛員要求的車輪扭矩加上補償扭矩向動力裝置命令扭矩以緩解與上坡坡度相關聯的重力阻力,其中補償扭矩從對應于重力阻力的阻力扭矩減去基于駕駛員要求的扭矩的值而導出。
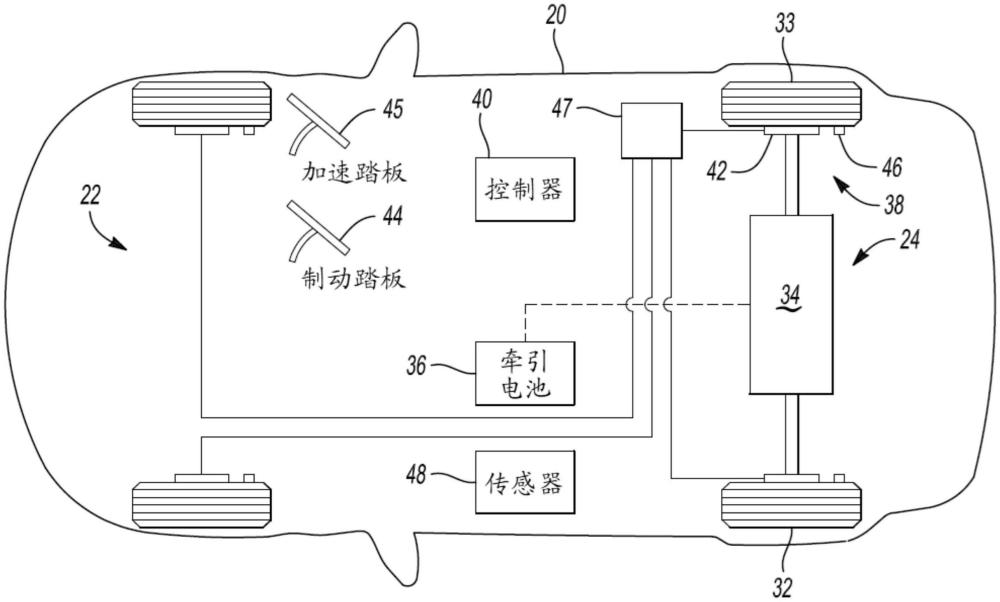
2、根據另一個實施例,一種車輛包括:動力裝置;加速踏板;傳感器,所述傳感器與加速踏板相關聯并且被配置為輸出指示加速踏板位置的數據;以及控制器。控制器被編程為當車輛在非平坦道路坡度上時向動力裝置命令包括重力抵消分量的扭矩,其中扭矩被命令為使得隨著加速踏板位置增加,重力抵消分量朝向零收斂。
3、一種用于抵消車輛中的重力影響的方法包括當車輛在非平坦道路坡度上時向車輛的動力裝置命令包括重力抵消分量的扭矩,其中扭矩被命令為使得隨著加速踏板位置增加,重力抵消分量朝向零收斂。
技術特征:
1.一種車輛,其包括:
2.如權利要求1所述的車輛,其中所述控制器還被編程為:響應于所述車輛在下坡坡度上而基于所述駕駛員要求的車輪扭矩減去另一補償扭矩向所述動力裝置命令另一扭矩以緩解與所述下坡坡度相關聯的重力阻力,其中所述另一補償扭矩從對應于所述重力阻力的阻力扭矩減去基于所述駕駛員要求的扭矩的值而導出。
3.如權利要求1所述的車輛,其中所述補償扭矩等于所述阻力扭矩減去所述駕駛員要求的扭矩乘以增益。
4.如權利要求3所述的車輛,其中所述增益是預定值。
5.如權利要求3所述的車輛,其中所述增益是基于所述駕駛員要求的扭矩。
6.如權利要求1所述的車輛,其還包括加速度計。
7.如權利要求6所述的車輛,其中所述控制器還被編程為基于來自所述加速度計的數據來計算所述阻力扭矩。
8.如權利要求1所述的車輛,其中所述動力裝置是電機。
9.一種車輛,其包括:
10.如權利要求9所述的車輛,其中所述重力抵消分量小于與所述道路坡度相關聯的重力阻力扭矩。
11.如權利要求9所述的車輛,其中所述重力抵消分量是基于與所述道路坡度相關聯的重力阻力扭矩和駕駛員要求的車輪扭矩。
12.如權利要求11所述的車輛,其中所述重力抵消分量還基于作為所述加速踏板位置的函數的增益。
13.如權利要求9所述的車輛,其中所述重力抵消分量是基于與所述道路坡度相關聯的重力阻力扭矩和駕駛員要求的車輪扭矩。
14.如權利要求9所述的車輛,其中當所述道路坡度為上坡時,所述重力抵消分量為正值,并且當所述道路坡度為下坡時,所述重力抵消分量為負值。
15.如權利要求9所述的車輛,其還包括加速度計,其中所述重力抵消分量是基于來自所述加速度計的數據。
技術總結
本發明提供了“道路坡度上在單踏板駕駛模式期間的控制”。一種車輛包括:動力裝置;加速踏板;傳感器,所述傳感器與加速踏板相關聯并且被配置為輸出指示加速踏板位置的數據;以及控制器。控制器被編程為當車輛在非平坦道路坡度上時向動力裝置命令包括重力抵消分量的扭矩,其中扭矩被命令為使得隨著加速踏板位置增加,重力抵消分量朝向零收斂。
技術研發人員:S·G·塞門諾夫,巴里·謝潑德,R·B·艾克羅德
受保護的技術使用者:福特全球技術公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!