扭矩限制方法、電子設備及車輛與流程
本申請涉及車輛,尤其涉及一種扭矩限制方法、電子設備及車輛。
背景技術:
1、車輛朝著電動化、智能化方向的發展,對于前后軸解耦的車輛,車輛前后軸電機均能夠輸出較大的扭矩,在大扭矩行駛時,如果請求扭矩的數值過大,可能導致車輛車輪打滑,造成駕駛危險。
技術實現思路
1、有鑒于此,本申請的目的在于提出一種扭矩限制方法、電子設備及車輛,通過扭矩限制來保證車輪在不同路面行駛時不打滑,提高駕駛安全性。
2、基于上述目的,本申請提供了一種扭矩限制方法,包括:
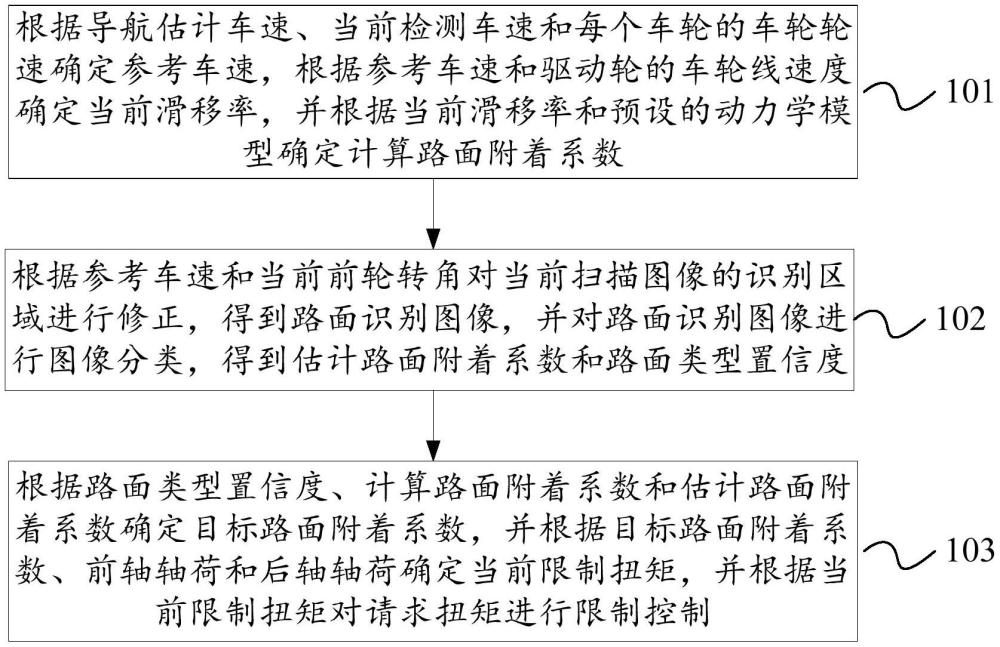
3、根據導航估計車速、當前檢測車速和每個車輪的車輪輪速確定參考車速,根據所述參考車速和驅動輪的車輪線速度確定當前滑移率,并根據所述當前滑移率和預設的動力學模型確定計算路面附著系數;
4、根據所述參考車速和當前前輪轉角對當前掃描圖像的識別區域進行修正,得到路面識別圖像,并對所述路面識別圖像進行圖像分類,得到估計路面附著系數和路面類型置信度;
5、根據所述路面類型置信度、所述計算路面附著系數和所述估計路面附著系數確定目標路面附著系數,并根據所述目標路面附著系數、前軸軸荷和后軸軸荷確定當前限制扭矩,并根據所述當前限制扭矩對請求扭矩進行限制控制。
6、基于同一發明構思,本公開還提供了一種電子設備,包括存儲器、處理器及存儲在所述存儲器上并可由所述處理器執行的計算機程序,所述處理器在執行所述計算機程序時實現如上所述的方法。
7、基于同一發明構思,本公開還提供了一種車輛,包括如上所述的電子設備。
8、從上面可以看出,本申請提供的扭矩限制方法、電子設備及車輛,能夠根據導航估計車速、當前檢測車速和每個車輪的車輪輪速確定參考車速,根據參考車速和驅動輪的車輪線速度確定當前滑移率,并根據當前滑移率和預設的動力學模型確定計算路面附著系數。在計算當前滑移率時引入導航估計車速和車輪輪速對當前檢測車速進行修正,保證當前滑移率的準確性,進而提升計算路面附著系數的準確性,提高扭矩限制精度。根據參考車速和當前前輪轉角對當前掃描圖像的識別區域進行修正,得到路面識別圖像,并對路面識別圖像進行圖像分類,得到估計路面附著系數和路面類型置信度。在估算路面附著系數時,通過對當前掃描圖像的識別區域進行修正來提高路面類型識別的準確性,進而提高估算路面附著系數的精度,保證扭矩限制的準確性。根據路面類型置信度、計算路面附著系數和估計路面附著系數確定目標路面附著系數,并根據目標路面附著系數、前軸軸荷和后軸軸荷確定當前限制扭矩,并根據當前限制扭矩對請求扭矩進行限制控制。在確定限制扭矩時,引入路面類型置信度來縮小目標路面附著系數與真實值之間的差距,以保證根據目標路面附著系數確定的限制扭矩的精度,進而保證根據限制扭矩進行請求限制時,能夠充分的利用目標路面附著系數,在保證動力性的同時保證車輛的車輪不會打滑,保證行駛的安全性。
技術特征:
1.一種扭矩限制方法,其特征在于,包括:
2.根據權利要求1所述的扭矩限制方法,其特征在于,所述根據導航估計車速、當前檢測車速和每個車輪的車輪輪速確定參考車速,包括:
3.根據權利要求2所述的扭矩限制方法,其特征在于,所述根據所述車速誤差值和所述分離系數在所述平均輪速、所述導航估計車速和所述當前檢測車速中確定所述參考車速,包括:
4.根據權利要求1所述的扭矩限制方法,其特征在于,所述根據所述參考車速和當前前輪轉角對當前掃描圖像的識別區域進行修正,得到路面識別圖像,包括:
5.根據權利要求1所述的扭矩限制方法,其特征在于,所述對所述路面識別圖像進行圖像分類,得到估計路面附著系數和路面類型置信度,包括:
6.根據權利要求1所述的扭矩限制方法,其特征在于,所述根據所述路面類型置信度、所述計算路面附著系數和所述估計路面附著系數確定目標路面附著系數,包括:
7.根據權利要求1所述的扭矩限制方法,其特征在于,所述根據所述目標路面附著系數、前軸軸荷和后軸軸荷確定當前限制扭矩,包括:
8.根據權利要求1所述的扭矩限制方法,其特征在于,所述根據所述當前限制扭矩對請求扭矩進行限制控制,包括:
9.一種電子設備,包括存儲器、處理器及存儲在存儲器上并在處理器上運行的計算機程序,其特征在于,所述處理器執行所述程序時實現如權利要求1至8任意一項所述的方法。
10.一種車輛,其特征在于,包括如權利要求9所述的電子設備。
技術總結
本申請提供一種扭矩限制方法、電子設備及車輛,在計算當前滑移率時引入導航估計車速和車輪輪速對當前檢測車速進行修正,保證當前滑移率的準確性,進而提升計算路面附著系數的準確性,提高扭矩限制精度。在估算路面附著系數時,通過對當前掃描圖像的識別區域進行修正來提高路面類型識別的準確性,進而提高估算路面附著系數的精度,保證扭矩限制的準確性。在確定限制扭矩時,引入路面類型置信度來縮小目標路面附著系數與真實值之間的差距,以保證根據目標路面附著系數確定的限制扭矩的精度,進而保證根據限制扭矩進行請求限制時,能夠充分的利用目標路面附著系數,在保證動力性的同時保證車輛的車輪不會打滑,保證行駛的安全性。
技術研發人員:朱孟栩,劉天培,劉乾坤,李建民,顧立夫,王嘉昊,張寧寧
受保護的技術使用者:長城汽車股份有限公司
技術研發日:
技術公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!