一種車輛越野模式調整方法及系統與流程
本發明涉及汽車,特別涉及一種車輛越野模式調整方法及系統。
背景技術:
1、隨著科技的進步以及生產力的快速發展,汽車的生產技術也日趨成熟,并且已經在人們的日常生活中得到普及,極大的方便了人們的生活。
2、其中,人們已經研發出多種不同的車型,以對應滿足不同用戶的需求,具體的,越野車是人們喜愛的車型之一,從而也得到了快速的發展。
3、進一步的,現有的越野車在出廠之前都會預先設置多種不同的越野模式,以對應滿足不同的形式路況,然而,在用戶實際駕駛的過程中,現有的越野車大部分都需要用戶手動選擇不同的越野模式以應對不同的越野場景,在此過程中,可能會出現多種越野場景穿插出現的情況,從而需要用戶反復的調節越野模式,給人們帶來了不變,同時存在著一定的安全隱患,對應降低了用戶的使用體驗。
技術實現思路
1、基于此,本發明的目的是提供一種車輛越野模式調整方法及系統,以解決現有技術大部分需要用戶手動選擇不同的越野模式以應對不同的越野場景,導致需要用戶反復的調節越野模式,對應降低了用戶使用體驗的問題。
2、本發明實施例第一方面提出了:
3、一種車輛越野模式調整方法,其中,所述方法包括:
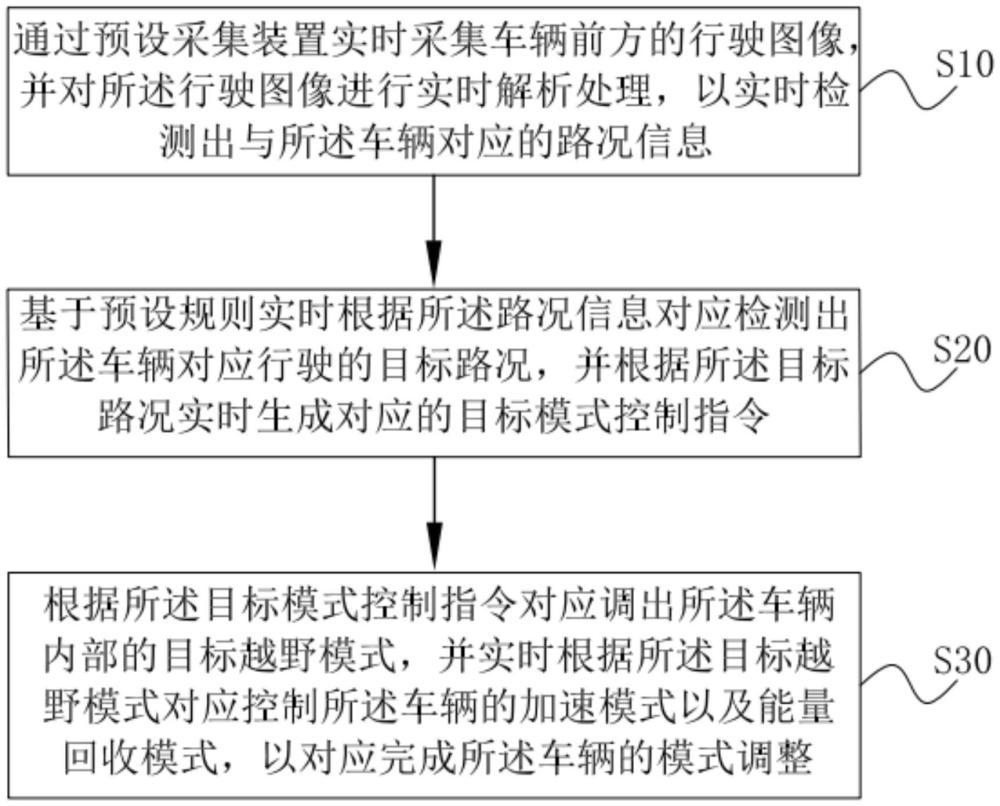
4、通過預設采集裝置實時采集車輛前方的行駛圖像,并對所述行駛圖像進行實時解析處理,以實時檢測出與所述車輛對應的路況信息;
5、基于預設規則實時根據所述路況信息對應檢測出所述車輛對應行駛的目標路況,并根據所述目標路況實時生成對應的目標模式控制指令;
6、根據所述目標模式控制指令對應調出所述車輛內部的目標越野模式,并實時根據所述目標越野模式對應控制所述車輛的加速模式以及能量回收模式,以對應完成所述車輛的模式調整。
7、本發明的有益效果是:通過實時采集車輛前方的行駛圖像,就能夠對應獲取到當前車輛的行駛信息,基于此,只需要進行對應的解析處理,就能夠對應獲取到當前車輛的路況信息,基于此,能夠實時根據當前獲取到的目標路況實時生成與當前車輛適配的目標模式控制指令,基于此,最后能夠通過該目標模式控制指令自動、準確的調出與當前車輛適配的目標越野模式,從而能夠省去人為手動操作的過程,對應提升了用戶的使用體驗。
8、進一步的,所述基于預設規則實時根據所述路況信息對應檢測出所述車輛對應行駛的目標路況的步驟包括:
9、當實時獲取到所述路況信息時,對所述路況信息進行實時解析處理,以對應檢測出與所述車輛對應的目標行駛道路;
10、根據所述目標行駛道路實時確定出與所述車輛對應的目標地圖信息以及目標定位信息,并實時根據所述目標地圖信息以及所述目標定位信息對應確定出與所述車輛對應的目標路況。
11、進一步的,所述實時根據所述目標地圖信息以及所述目標定位信息對應確定出與所述車輛對應的目標路況的步驟包括:
12、當實時獲取到所述目標地圖信息以及所述目標定位信息時,根據所述目標地圖信息以及所述目標定位信息實時確定出與所述車輛對應的目標地點;
13、當實時獲取到所述目標地點時,根據所述目標地點實時確定出對應的目標天氣信息;
14、根據所述目標天氣信息對應生成所述目標路況。
15、進一步的,所述根據所述目標路況實時生成對應的目標模式控制指令的步驟包括:
16、當實時獲取到所述目標天氣信息時,根據所述目標行駛道路實時確定出與所述車輛對應的實時天氣信息;
17、當實時獲取到所述實時天氣信息時,實時判斷所述實時天氣信息是否與所述目標天氣信息一致;
18、若實時判斷到所述實時天氣信息與所述目標天氣信息一致,則實時檢測出與所述目標天氣信息對應的天氣種類,并實時根據所述天氣種類對應確定出所述目標路況。
19、進一步的,所述根據所述目標路況實時生成對應的目標模式控制指令的步驟包括:
20、當實時獲取到所述目標路況時,實時確定出與所述目標路況對應的目標字符;
21、當實時獲取到所述目標字符時,通過預設算法將所述目標字符實時轉換成對應的目標代碼;
22、當實時獲取到所述目標代碼時,對所述目標代碼進行指令化處理,以對應生成所述目標模式控制指令。
23、進一步的,所述根據所述目標路況實時生成對應的目標模式控制指令的步驟包括:
24、當實時獲取到所述目標代碼時,在預設數據庫中實時調出與所述目標代碼適配的指令生成模型;
25、將所述目標代碼對應輸入至所述指令生成模型的內部,以對應輸出所述目標模型控制指令。
26、進一步的,所述將所述目標代碼對應輸入至所述指令生成模型的內部,以對應輸出所述目標模型控制指令的步驟包括:
27、當實時獲取到所述目標代碼時,實時檢測出所述目標代碼的內部對應包含的若干代碼值,并實時檢測出所述指令生成模型的內部對應包含的若干模型節點,且將若干所述代碼值對應輸入至若干所述模型節點的內部,以對應輸出所述目標模型控制指令。
28、本發明實施例第二方面提出了:
29、一種車輛越野模式調整系統,其中,所述系統包括:
30、采集模塊,用于通過預設采集裝置實時采集車輛前方的行駛圖像,并對所述行駛圖像進行實時解析處理,以實時檢測出與所述車輛對應的路況信息;
31、檢測模塊,用于基于預設規則實時根據所述路況信息對應檢測出所述車輛對應行駛的目標路況,并根據所述目標路況實時生成對應的目標模式控制指令;
32、控制模塊,用于根據所述目標模式控制指令對應調出所述車輛內部的目標越野模式,并實時根據所述目標越野模式對應控制所述車輛的加速模式以及能量回收模式,以對應完成所述車輛的模式調整。
33、進一步的,所述控制模塊具體用于:
34、當實時獲取到所述路況信息時,對所述路況信息進行實時解析處理,以對應檢測出與所述車輛對應的目標行駛道路;
35、根據所述目標行駛道路實時確定出與所述車輛對應的目標地圖信息以及目標定位信息,并實時根據所述目標地圖信息以及所述目標定位信息對應確定出與所述車輛對應的目標路況。
36、進一步的,所述控制模塊具體用于:
37、當實時獲取到所述目標地圖信息以及所述目標定位信息時,根據所述目標地圖信息以及所述目標定位信息實時確定出與所述車輛對應的目標地點;
38、當實時獲取到所述目標地點時,根據所述目標地點實時確定出對應的目標天氣信息;
39、根據所述目標天氣信息對應生成所述目標路況。
40、進一步的,所述控制模塊具體用于:
41、當實時獲取到所述目標天氣信息時,根據所述目標行駛道路實時確定出與所述車輛對應的實時天氣信息;
42、當實時獲取到所述實時天氣信息時,實時判斷所述實時天氣信息是否與所述目標天氣信息一致;
43、若實時判斷到所述實時天氣信息與所述目標天氣信息一致,則實時檢測出與所述目標天氣信息對應的天氣種類,并實時根據所述天氣種類對應確定出所述目標路況。
44、進一步的,所述控制模塊具體用于:
45、當實時獲取到所述目標路況時,實時確定出與所述目標路況對應的目標字符;
46、當實時獲取到所述目標字符時,通過預設算法將所述目標字符實時轉換成對應的目標代碼;
47、當實時獲取到所述目標代碼時,對所述目標代碼進行指令化處理,以對應生成所述目標模式控制指令。
48、進一步的,所述控制模塊具體用于:
49、當實時獲取到所述目標代碼時,在預設數據庫中實時調出與所述目標代碼適配的指令生成模型;
50、將所述目標代碼對應輸入至所述指令生成模型的內部,以對應輸出所述目標模型控制指令。
51、進一步的,所述控制模塊具體用于:
52、當實時獲取到所述目標代碼時,實時檢測出所述目標代碼的內部對應包含的若干代碼值,并實時檢測出所述指令生成模型的內部對應包含的若干模型節點,且將若干所述代碼值對應輸入至若干所述模型節點的內部,以對應輸出所述目標模型控制指令。
53、本發明實施例第三方面提出了:
54、一種計算機,包括存儲器、處理器以及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,其中,所述處理器執行所述計算機程序時實現如上面所述的車輛越野模式調整方法。
55、本發明實施例第四方面提出了:
56、一種可讀存儲介質,其上存儲有計算機程序,其中,該程序被處理器執行時實現如上面所述的車輛越野模式調整方法。
57、本發明的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發明的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!