一種考慮路面濕滑程度的電動兩輪車打滑控制方法與流程
本申請涉及車輛,尤其是一種考慮路面濕滑程度的電動兩輪車打滑控制方法。
背景技術:
1、電動兩輪車在車輛起步、加速以及溜滑路面上容易出現打滑現象,為了減小電動兩輪車因車輛打滑而引起的不安全問題,目前電動兩輪車一般都通過牽引力控制系統(traction?control?system,tcs)進行打滑控制,核心思想是在檢測到電動兩輪車的驅動輪和從動輪的輪速差大于設定值時認為出現了打滑現象,此時會根據輪速差進行扭矩計算并分配到驅動輪,通過降低扭矩的方法來抑制打滑。但是電動兩輪車運行路面狀態多變,簡單單一的降扭矩做法容易造成頓挫感,影響電動兩輪車的行駛平穩性,也影響乘坐體驗。
技術實現思路
1、本申請針對上述問題及技術需求,提出了一種考慮路面濕滑程度的電動兩輪車打滑控制方法,本申請的技術方案如下:
2、一種考慮路面濕滑程度的電動兩輪車打滑控制方法,該電動兩輪車打滑控制方法包括:
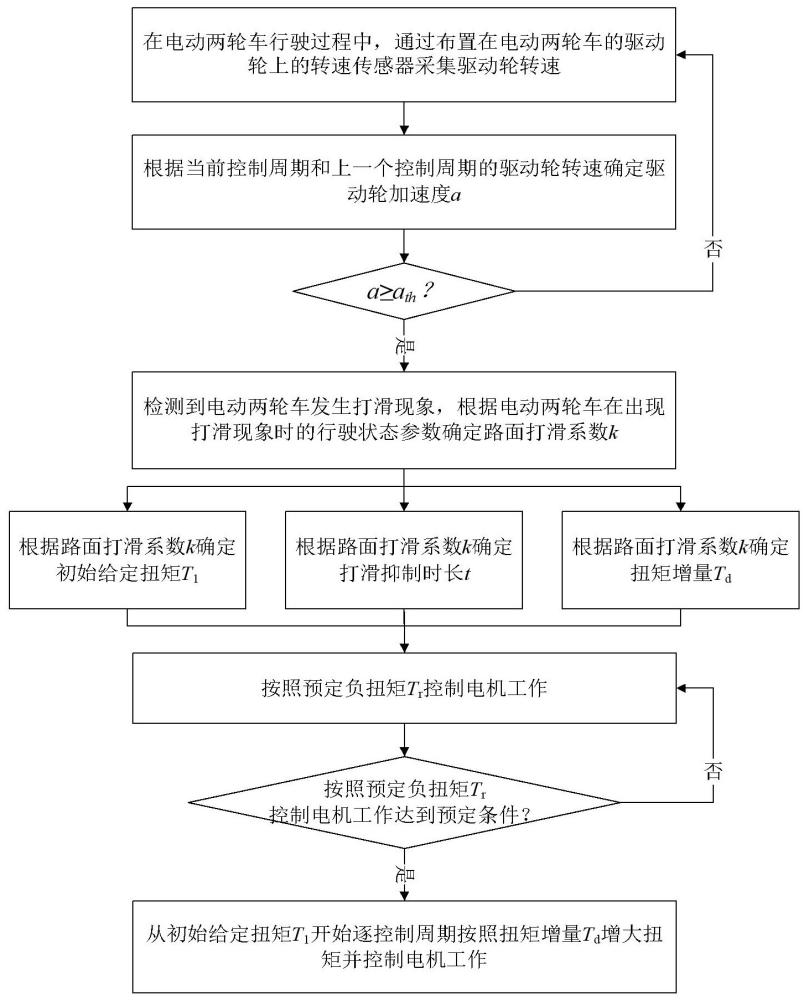
3、在檢測到電動兩輪車發生打滑現象時,根據電動兩輪車在出現打滑現象時的行駛狀態參數確定路面打滑系數k并按照預定負扭矩tr控制電機工作;其中,路面打滑系數k越大,表征的路面濕滑程度越高;
4、根據路面打滑系數k確定扭矩增量td,路面打滑系數k越大,扭矩增量td越小;
5、在按照預定負扭矩tr控制電機工作達到預定條件后,從初始給定扭矩t1開始逐控制周期按照扭矩增量td增大扭矩并控制電機工作。
6、其進一步的技術方案為,電動兩輪車打滑控制方法還包括:
7、在按照預定負扭矩tr控制電機工作達到打滑抑制時長t時,或者,在檢測到電動兩輪車的驅動力轉速低于轉速閾值時,確定按照預定負扭矩tr控制電機工作達到預定條件,否則確定還未達到預定條件。
8、其進一步的技術方案為,電動兩輪車打滑控制方法還包括:
9、根據路面打滑系數k確定打滑抑制時長t,路面打滑系數k越大,打滑抑制時長t越小。
10、其進一步的技術方案為,初始給定扭矩t1大于0。
11、其進一步的技術方案為,電動兩輪車打滑控制方法還包括:
12、根據路面打滑系數k確定初始給定扭矩t1,路面打滑系數k越大,初始給定扭矩t1越小。
13、其進一步的技術方案為,電動兩輪車打滑控制方法還包括:
14、在電動兩輪車行駛過程中,通過布置在電動兩輪車的驅動輪上的轉速傳感器采集驅動輪轉速,并根據驅動輪轉速檢測電動兩輪車是否發生打滑現象。
15、其進一步的技術方案為,根據驅動輪轉速檢測電動兩輪車是否發生打滑現象包括:
16、根據當前控制周期和上一個控制周期的驅動輪轉速確定驅動輪加速度a,當在電動兩輪車行駛過程中檢測到驅動輪加速度a達到加速度閾值ath時,確定電動兩輪車發生打滑現象。
17、其進一步的技術方案為,根據電動兩輪車在出現打滑現象時的行駛狀態參數確定路面打滑系數k包括:
18、查詢打滑系數查找表確定與電動兩輪車發生打滑現象時的驅動輪加速度a和電機扭矩te對應的路面打滑系數k;
19、其中,打滑系數查找表預先建立得到,相同驅動輪加速度a下電機扭矩te越小、對應的路面打滑系數k越大,相同電機扭矩te下驅動輪加速度a越大、對應的路面打滑系數k越大。
20、其進一步的技術方案為,電動兩輪車打滑控制方法還包括:
21、從初始給定扭矩t1開始逐控制周期按照扭矩增量td增大扭矩并控制電機工作直至再次檢測到電動兩輪車發生打滑現象,或者直至增大到最大扭矩時保持按照最大扭矩控制電機工作。
22、本申請的有益技術效果是:
23、本申請公開了一種考慮路面濕滑程度的電動兩輪車打滑控制方法,該方法在檢測到電動兩輪車出現打滑現象時分兩階段控制,第一階段進行給定負扭矩快速抑制打滑,并根據電動兩輪車在出現打滑現象時的行駛狀態參數確定路面打滑系數,繼而可以根據路面打滑系數確定與路面濕滑程度匹配的扭矩增量,第二階段就能按照與路面濕滑程度匹配的扭矩增量進行扭矩增大,從而達成在濕滑路面下緩慢增加扭矩避免再次打滑,在相對不濕滑路面下快速增加扭矩避免頓挫的效果,既可以保證電動兩輪車行駛平穩性也可以優化乘坐體驗。
24、該方法第二階段的初始給定扭矩并不固定從0開始,可以提高車輛響應,另外,第一階段的持續時長也根據路面打滑系數確定從而與路面濕滑程度匹配,第二階段的初始給定扭矩也根據路面打滑系數確定從而與路面濕滑程度匹配,使得整個打滑控制過程都根據路面濕滑程度來進行,能夠更好的適應不同路面濕滑程度的打滑控制需求,保證電動兩輪車行駛平穩性和駕乘體感。
25、該方法利用驅動輪加速度來檢測電動兩輪車是否打滑,無需在從動輪上安裝轉速傳感器,可以減少器件使用,有利于減少計算量以及降低成本。
技術特征:
1.一種考慮路面濕滑程度的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法包括:
2.根據權利要求1所述的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法還包括:
3.根據權利要求2所述的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法還包括:
4.根據權利要求1所述的電動兩輪車打滑控制方法,其特征在于,初始給定扭矩t1大于0。
5.根據權利要求4所述的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法還包括:
6.根據權利要求1所述的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法還包括:
7.根據權利要求6所述的電動兩輪車打滑控制方法,其特征在于,根據驅動輪轉速檢測電動兩輪車是否發生打滑現象包括:
8.根據權利要求1所述的電動兩輪車打滑控制方法,其特征在于,根據電動兩輪車在出現打滑現象時的行駛狀態參數確定路面打滑系數k包括:
9.根據權利要求1所述的電動兩輪車打滑控制方法,其特征在于,所述電動兩輪車打滑控制方法還包括:
技術總結
本申請公開了一種考慮路面濕滑程度的電動兩輪車打滑控制方法,涉及車輛技術領域,該方法在檢測到電動兩輪車發生打滑現象時,第一階段首先按照預定負扭矩控制電機工作,快速抑制打滑,并根據電動兩輪車在出現打滑現象時的行駛狀態參數確定路面打滑系數,然后在按照預定負扭矩控制電機工作達到預定條件后,在第二階段從初始給定扭矩開始逐控制周期按照扭矩增量增大扭矩并控制電機工作,路面打滑系數越大,表征的路面濕滑程度越高,確定的扭矩增量越小,從而達成在濕滑路面下緩慢增加扭矩避免再次打滑,在相對不濕滑路面下快速增加扭矩避免頓挫的效果,既可以保證電動兩輪車行駛平穩性也可以優化乘坐體驗。
技術研發人員:史文凡
受保護的技術使用者:無錫凌博電子技術股份有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!