一種列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法、裝置、設(shè)備及存儲(chǔ)介質(zhì)與流程
本技術(shù)涉及列車(chē)運(yùn)行監(jiān)控領(lǐng)域,特別涉及一種列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法、裝置、設(shè)備及存儲(chǔ)介質(zhì)。
背景技術(shù):
1、目前,在對(duì)普速線路上的列車(chē)的運(yùn)行狀態(tài)進(jìn)行監(jiān)控時(shí),通常通過(guò)霍爾或光電式速度傳感器來(lái)獲取列車(chē)的走行速度和走行位移,采用該方式獲取列車(chē)速度及位移時(shí)需以機(jī)車(chē)輪徑作為計(jì)算參數(shù)。但機(jī)車(chē)輪徑在日常運(yùn)行及鏇輪作業(yè)時(shí)均會(huì)對(duì)機(jī)車(chē)輪徑造成影響,當(dāng)列車(chē)運(yùn)行監(jiān)控系統(tǒng)中設(shè)定的機(jī)車(chē)輪徑與機(jī)車(chē)實(shí)際輪徑不一致時(shí),計(jì)算出的列車(chē)走行速度和走行位移也會(huì)與實(shí)際值出現(xiàn)誤差,此時(shí)無(wú)法準(zhǔn)確獲取列車(chē)當(dāng)前的速度和位置信息,嚴(yán)重時(shí)甚至?xí)斐尚熊?chē)事故。
2、然而,當(dāng)前機(jī)車(chē)的輪徑信息通常通過(guò)人工的方式定期測(cè)量,并通過(guò)人工輸入的方式導(dǎo)入到列車(chē)運(yùn)行監(jiān)控系統(tǒng)中,存在人為因素介入較多和工作量較大的缺陷,同時(shí)存在機(jī)車(chē)輪徑參數(shù)漏輸或誤輸?shù)惹闆r,從而增加了鐵路現(xiàn)場(chǎng)工作人員檢修作業(yè)的頻率及機(jī)車(chē)駕駛?cè)藛T人工距離校正操作的頻率。
技術(shù)實(shí)現(xiàn)思路
1、有鑒于此,本技術(shù)的目的在于提供一種列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法、裝置、設(shè)備及存儲(chǔ)介質(zhì),能夠?qū)崿F(xiàn)自動(dòng)化列車(chē)運(yùn)行距離誤差的修正,節(jié)省人力成本和時(shí)間成本,并且減少了機(jī)車(chē)運(yùn)行過(guò)程中距離誤差和速度誤差,從而提高了列車(chē)走行速度及走行位移等運(yùn)行狀態(tài)監(jiān)控的準(zhǔn)確性。其具體方案如下:
2、第一方面,本技術(shù)公開(kāi)了一種列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法,應(yīng)用于列車(chē)運(yùn)行監(jiān)控系統(tǒng),包括:
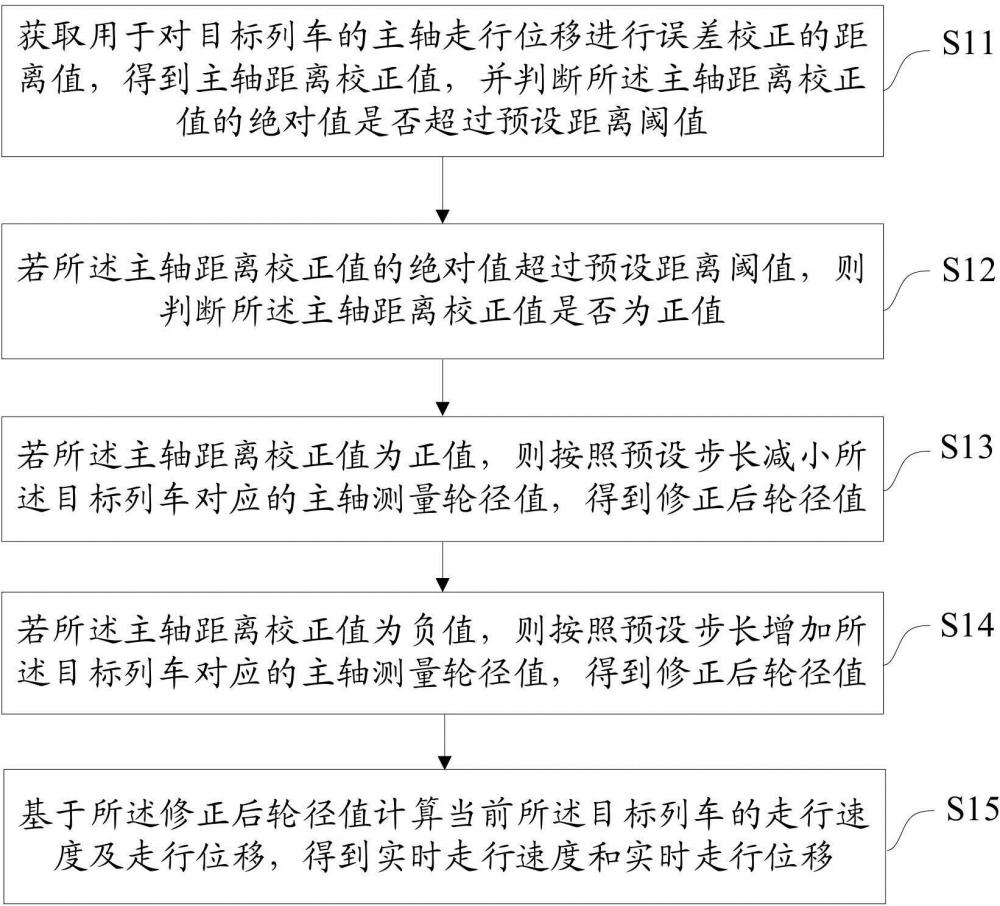
3、獲取用于對(duì)目標(biāo)列車(chē)的主軸走行位移進(jìn)行誤差校正的距離值,得到主軸距離校正值,并判斷所述主軸距離校正值的絕對(duì)值是否超過(guò)預(yù)設(shè)距離閾值;
4、若所述主軸距離校正值的絕對(duì)值超過(guò)所述預(yù)設(shè)距離閾值,則判斷所述主軸距離校正值是否為正值;
5、若所述主軸距離校正值為正值,則按照預(yù)設(shè)步長(zhǎng)減小所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;
6、若所述主軸距離校正值為負(fù)值,則按照預(yù)設(shè)步長(zhǎng)增加所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;
7、基于所述修正后輪徑值計(jì)算當(dāng)前所述目標(biāo)列車(chē)的走行速度及走行位移,得到實(shí)時(shí)走行速度和實(shí)時(shí)走行位移。
8、可選的,所述基于所述修正后輪徑值計(jì)算當(dāng)前所述目標(biāo)列車(chē)的走行速度及走行位移,得到實(shí)時(shí)走行速度和實(shí)時(shí)走行位移,包括:
9、判斷所述修正后輪徑值是否超過(guò)預(yù)設(shè)修正閾值;
10、若所述修正后輪徑值未超過(guò)所述預(yù)設(shè)修正閾值,則基于所述修正后輪徑值計(jì)算當(dāng)前預(yù)設(shè)周期內(nèi)所述目標(biāo)列車(chē)的走行速度及走行位移,得到實(shí)時(shí)走行速度和實(shí)時(shí)走行位移。
11、可選的,所述列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法,還包括:
12、獲取上一周期所述目標(biāo)列車(chē)的走行速度,得到歷史走行速度;
13、基于所述歷史走行速度及所述實(shí)時(shí)走行速度計(jì)算所述目標(biāo)列車(chē)的加速度,得到當(dāng)前加速度。
14、可選的,所述列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法,還包括:
15、獲取所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸標(biāo)準(zhǔn)輪徑值;
16、計(jì)算所述主軸標(biāo)準(zhǔn)輪徑值與預(yù)設(shè)比例閾值的乘積,得到所述預(yù)設(shè)修正閾值。
17、可選的,當(dāng)所述主軸距離校正值為負(fù)值時(shí),還包括:
18、獲取當(dāng)前基準(zhǔn)點(diǎn)與上一基準(zhǔn)點(diǎn)之間計(jì)算得到的主軸走行位移,得到主軸計(jì)算位移;
19、計(jì)算所述主軸計(jì)算位移與所述主軸距離校正值之和,得到所述目標(biāo)列車(chē)的實(shí)際走行位移;
20、獲取當(dāng)前基準(zhǔn)點(diǎn)與上一基準(zhǔn)點(diǎn)之間計(jì)算得到的備軸走行位移,得到備軸計(jì)算位移;
21、計(jì)算所述備軸計(jì)算位移與所述實(shí)際走行位移之差,得到備軸距離校正值。
22、可選的,當(dāng)所述主軸距離校正值為正值時(shí),還包括:
23、獲取當(dāng)前基準(zhǔn)點(diǎn)與上一基準(zhǔn)點(diǎn)之間計(jì)算得到的主軸走行位移,得到主軸計(jì)算位移;
24、計(jì)算所述主軸計(jì)算位移與所述主軸距離校正值之差,得到所述目標(biāo)列車(chē)的實(shí)際走行位移;
25、獲取當(dāng)前基準(zhǔn)點(diǎn)與上一基準(zhǔn)點(diǎn)之間計(jì)算得到的備軸走行位移,得到備軸計(jì)算位移;
26、計(jì)算所述備軸計(jì)算位移與所述實(shí)際走行位移之差,得到備軸距離校正值。
27、可選的,所述列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法,還包括:
28、當(dāng)監(jiān)測(cè)到主軸速度傳感器故障后,切換至備軸速度傳感器,并判斷所述備軸距離校正值的絕對(duì)值是否超過(guò)預(yù)設(shè)距離閾值;
29、若所述備軸距離校正值的絕對(duì)值超過(guò)所述預(yù)設(shè)距離閾值,則判斷所述備軸距離校正值是否為正值;
30、若所述備軸距離校正值為正值,則按照所述預(yù)設(shè)步長(zhǎng)減小所述目標(biāo)列車(chē)對(duì)應(yīng)的備軸測(cè)量輪徑值,得到備軸修正值;
31、若所述備軸距離校正值為負(fù)值,則按照預(yù)設(shè)步長(zhǎng)增加所述目標(biāo)列車(chē)對(duì)應(yīng)的備軸測(cè)量輪徑值,得到備軸修正值;
32、基于所述備軸修正值計(jì)算當(dāng)前所述目標(biāo)列車(chē)的走行速度及走行位移,得到當(dāng)前走行速度和當(dāng)前走行位移。
33、第二方面,本技術(shù)公開(kāi)了一種列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)裝置,應(yīng)用于列車(chē)運(yùn)行監(jiān)控系統(tǒng),包括:
34、獲取模塊,用于獲取用于對(duì)目標(biāo)列車(chē)的主軸走行位移進(jìn)行誤差校正的距離值,得到主軸距離校正值;
35、第一判斷模塊,用于判斷所述主軸距離校正值的絕對(duì)值是否超過(guò)預(yù)設(shè)距離閾值;
36、第二判斷模塊,用于如果所述主軸距離校正值的絕對(duì)值超過(guò)所述預(yù)設(shè)距離閾值,則判斷所述主軸距離校正值是否為正值;
37、第一修正模塊,用于如果所述主軸距離校正值為正值,則按照預(yù)設(shè)步長(zhǎng)減小所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;
38、第二修正模塊,用于如果所述主軸距離校正值為負(fù)值,則按照預(yù)設(shè)步長(zhǎng)增加所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;
39、狀態(tài)監(jiān)測(cè)模塊,用于基于所述修正后輪徑值計(jì)算當(dāng)前所述目標(biāo)列車(chē)的走行速度及走行位移,得到實(shí)時(shí)走行速度和實(shí)時(shí)走行位移。
40、第三方面,本技術(shù)公開(kāi)了一種電子設(shè)備,包括處理器和存儲(chǔ)器;其中,所述處理器執(zhí)行所述存儲(chǔ)器中保存的計(jì)算機(jī)程序時(shí)實(shí)現(xiàn)前述的列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法。
41、第四方面,本技術(shù)公開(kāi)了一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),用于存儲(chǔ)計(jì)算機(jī)程序;其中,所述計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)前述的列車(chē)運(yùn)行狀態(tài)監(jiān)測(cè)方法。
42、可見(jiàn),本技術(shù)應(yīng)用于列車(chē)運(yùn)行監(jiān)控系統(tǒng),先獲取用于對(duì)目標(biāo)列車(chē)的主軸走行位移進(jìn)行誤差校正的距離值,得到主軸距離校正值,并判斷所述主軸距離校正值的絕對(duì)值是否超過(guò)預(yù)設(shè)距離閾值;若所述主軸距離校正值的絕對(duì)值超過(guò)所述預(yù)設(shè)距離閾值,則判斷所述主軸距離校正值是否為正值;若所述主軸距離校正值為正值,則按照預(yù)設(shè)步長(zhǎng)減小所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;若所述主軸距離校正值為負(fù)值,則按照預(yù)設(shè)步長(zhǎng)增加所述目標(biāo)列車(chē)對(duì)應(yīng)的主軸測(cè)量輪徑值,得到修正后輪徑值;基于所述修正后輪徑值計(jì)算當(dāng)前所述目標(biāo)列車(chē)的走行速度及走行位移,得到實(shí)時(shí)走行速度和實(shí)時(shí)走行位移。本技術(shù)先判斷主軸距離校正值的絕對(duì)值是否超過(guò)預(yù)設(shè)距離閾值,若是則進(jìn)一步判斷主軸距離校正值的正負(fù),若為正值,則按照預(yù)設(shè)步長(zhǎng)調(diào)小主軸測(cè)量輪徑值;若為負(fù)值,則按照預(yù)設(shè)步長(zhǎng)調(diào)大主軸測(cè)量輪徑值,通過(guò)上述方式對(duì)列車(chē)的車(chē)輪直徑誤差進(jìn)行修正,不僅實(shí)現(xiàn)了自動(dòng)化列車(chē)運(yùn)行距離誤差的修正,節(jié)省了人力成本和時(shí)間成本,并且無(wú)需引入額外硬件設(shè)備資源,便可以在機(jī)車(chē)運(yùn)行過(guò)程中動(dòng)態(tài)調(diào)整機(jī)車(chē)輪徑,從而減少了機(jī)車(chē)運(yùn)行過(guò)程中距離誤差和速度誤差,進(jìn)而提高了列車(chē)走行速度及走行位移等運(yùn)行狀態(tài)監(jiān)控的準(zhǔn)確性,同時(shí)減少了鐵路現(xiàn)場(chǎng)工作人員的檢修作業(yè)頻率及機(jī)車(chē)駕駛?cè)藛T人工距離校正操作頻率。
- 一種基于軌道安裝的安裝座和檢...
- 一種轉(zhuǎn)向架、調(diào)節(jié)方法及運(yùn)輸車(chē)...
- 一種便攜式GSM-R手持臺(tái)功...
- 一種用于重聯(lián)運(yùn)行的單軌列車(chē)休...
- 基于自評(píng)價(jià)機(jī)制的機(jī)車(chē)粘著控制...
- 一種雙側(cè)作用車(chē)鉤解鉤裝置及方...
- 一種雙鐵軌軌道檢測(cè)裝置
- 用于TACS的降級(jí)列車(chē)運(yùn)行防...
- 用于監(jiān)控車(chē)輛車(chē)隊(duì)完整性的系統(tǒng)...
- 多通訊協(xié)議數(shù)據(jù)融合裝置的制作...
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!
- 一種基于防沉迷的終端運(yùn)行控制方法、設(shè)備及系統(tǒng)的制作方法
- 車(chē)輛控制設(shè)備、列車(chē)控制系統(tǒng)及列車(chē)控制方法
- 一種apf并聯(lián)運(yùn)行的控制系統(tǒng)的制作方法
- 工業(yè)機(jī)器人控制系統(tǒng)及其運(yùn)行模式的切換方法
- 列車(chē)運(yùn)行控制系統(tǒng)中的地面目標(biāo)控制器的制造方法
- 一種自動(dòng)運(yùn)行控制系統(tǒng)的制作方法
- 分段式碾米機(jī)的運(yùn)行控制系統(tǒng)的制作方法
- 帶狀料車(chē)縫的自動(dòng)控制系統(tǒng)的制作方法
- 一種基于通信的列車(chē)運(yùn)行控制系統(tǒng)的安全計(jì)算機(jī)平臺(tái)的制作方法
- 一種列車(chē)補(bǔ)水排污控制系統(tǒng)的制作方法
- 適用于普速鐵路的行車(chē)控制系統(tǒng)的制造方法與工藝
- 一種自動(dòng)保護(hù)式養(yǎng)殖裝運(yùn)裝置的制造方法
- 手術(shù)室監(jiān)控方法和手術(shù)室監(jiān)控裝置與流程
- 一種農(nóng)產(chǎn)品安全信息監(jiān)控方法及裝置與流程
- 一種報(bào)刊亭監(jiān)控方法、裝置及系統(tǒng)與流程
- 一種異常應(yīng)用行為監(jiān)控方法和裝置與流程
- 視頻監(jiān)控?cái)?shù)據(jù)存儲(chǔ)方法和裝置與流程
- 一種操作系統(tǒng)運(yùn)行信息記錄方法及裝置與流程
- 空調(diào)器運(yùn)行模式的控制方法、裝置和空調(diào)器與流程
- 一種用于列車(chē)運(yùn)行監(jiān)控系統(tǒng)的設(shè)備故障智能診斷及處理銷(xiāo)號(hào)的方法與流程