車輛橫向響應補償方法、裝置、電子設備及存儲介質與流程
本技術涉及智能車輛,尤其涉及一種車輛橫向響應補償方法、裝置、電子設備及存儲介質。
背景技術:
1、在車輛裝配過程中,由于齒輪與齒條存在對中偏差,容易導致車輛的橫向響應風險,具體可為左右響應不一致。同時,轉向系統的各個機構之間可能會存在裝配不緊密的現象,存在轉向間隙的問題,當車輛經過長時間使用后,零部件之間存在磨損,轉向間隙會增大,此時車輛的左右響應的不一致性與不足性會進一步加大。對于adas系統控制下的車輛而言,上述現象將會降低adas的控制性能下降,從而對車輛的安全性產生影響。
2、現有技術中,對于車輛左右響應不一致或者橫向響應量不足的情況一般從轉向系統內部層面進行考慮提出解決方案,例如通過對左右響應差異量、轉向間隙等進行辨識來獲取方向盤轉角的補償量,這種從系統內部結構出發進行響應補償的方式,效率較低,補償效果不佳。
技術實現思路
1、基于此,有必要針對上述技術問題,提供一種車輛橫向響應補償方法、裝置、電子設備及存儲介質,以提高響應補償效率和補償效果。
2、一種車輛橫向響應補償方法,包括:
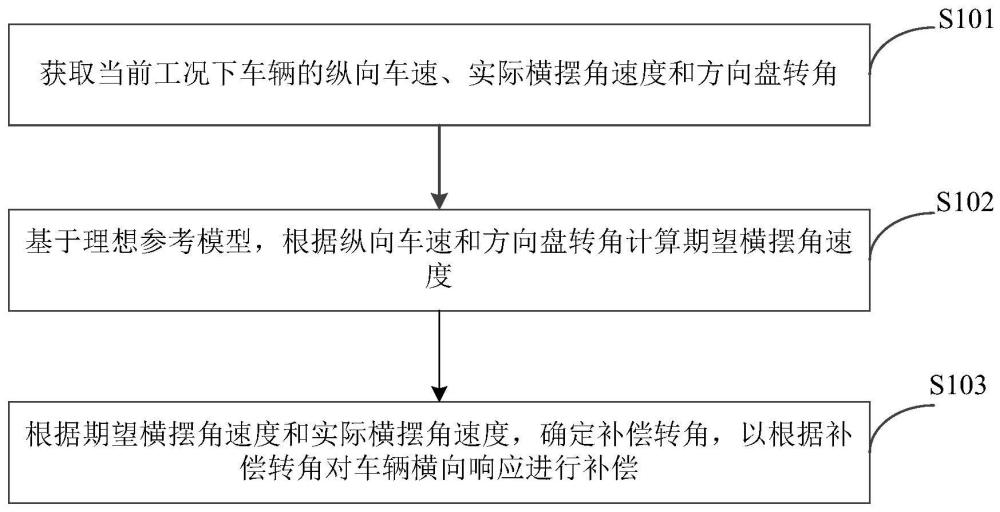
3、獲取當前工況下車輛的縱向車速、實際橫擺角速度和方向盤轉角;
4、基于理想參考模型,根據所述縱向車速和所述方向盤轉角計算期望橫擺角速度;
5、根據所述期望橫擺角速度和所述實際橫擺角速度,確定補償轉角,以根據所述補償轉角對車輛橫向響應進行補償。
6、在本技術實施例中,所述根據所述期望橫擺角速度和所述實際橫擺角速度,確定補償轉角,包括:
7、根據所述期望橫擺角速度和所述實際橫擺角速度,計算滑模等效控制項的值和滑模切換控制項的值;
8、對所述滑模等效控制項的值和所述滑模切換控制項的值進行求和,將求和后得到的和值確定為所述補償轉角。
9、在本技術實施例中,通過以下過程確定所述滑模等效控制項:
10、將實際橫擺角速度與期望橫擺角速度的差值,確定為基于滑模控制算法對期望橫擺角速度信號進行跟蹤的跟蹤誤差;
11、基于跟蹤誤差、滑模函數和實際橫擺角加速度表達式,推導所述滑模等效控制項,所述實際橫擺角速度表示式為基于二自由度車輛模型確定的。
12、在本技術實施例中,所述基于理想參考模型,根據所述縱向車速和所述方向盤轉角計算期望橫擺角速度,包括:
13、基于卡爾曼濾波修正當前工況下車輛質心到前軸的距離和車輛質心到后軸的距離,以修正理想參考模型;
14、基于修正后的理想參考模型,根據所述縱向車速和所述方向盤轉角計算所述期望橫擺角速度。
15、在本技術實施例中,所述基于卡爾曼濾波修正當前工況下車輛質心到前軸的距離和車輛質心到后軸的距離,以修正理想參考模型,包括:
16、基于卡爾曼濾波,獲取當前時刻對車輛質心到前軸距離的估計值和當前時刻對車輛質心到后軸距離的估計值;
17、將所述車輛質心到前軸距離的估計值作為所述理想參考模型中車輛質心到前軸距離的值,將所述車輛質心到后軸距離的估計值作為所述理想參考模型中車輛質心到后軸距離的值。
18、在本技術實施例中,所述基于卡爾曼濾波,獲取當前時刻對車輛質心到前軸距離的估計值和當前時刻對車輛質心到后軸距離的估計值,包括:
19、根據路面輸入模型、車輛對應的懸掛質量運動方程和車輛對應的非懸掛質量運動方程確定卡爾曼濾波算法對應的各個矩陣的參數,所述參數中包括系統狀態變量;
20、基于所述各個矩陣執行卡爾曼濾波算法,得到卡爾曼濾波算法估計的當前時刻系統狀態值;
21、根據所述卡爾曼濾波算法估計的當前時刻系統狀態值和所述非懸掛質量運動方程,計算當前時刻車輛懸架力的估計值;
22、根據所述懸掛質量運動方程、當前時刻所述車輛懸架力的估計值,計算所述車輛質心到前軸距離的估計值和所述車輛質心到后軸距離的估計值。
23、在本技術實施例中,所述理想參考模型為二自由度車輛模型。
24、一種車輛橫向響應補償裝置,包括:
25、獲取模塊,用于獲取當前工況下車輛的縱向車速、實際橫擺角速度和方向盤轉角;
26、計算模塊,用于基于理想參考模型,根據所述縱向車速和所述方向盤轉角計算期望橫擺角速度;
27、響應補償模塊,用于根據所述期望橫擺角速度和所述實際橫擺角速度,確定補償轉角,以根據所述補償轉角對車輛橫向響應進行補償。
28、在本技術實施例中,所述響應補償模塊,進一步用于:
29、根據所述期望橫擺角速度和所述實際橫擺角速度,計算滑模等效控制項的值和滑模切換控制項的值;
30、對所述滑模等效控制項的值和所述滑模切換控制項的值進行求和,將求和后得到的和值確定為所述補償轉角。
31、在本技術實施例中,通過以下過程確定所述滑模等效控制項:
32、將實際橫擺角速度與期望橫擺角速度的差值,確定為基于滑模控制算法對期望橫擺角速度信號進行跟蹤的跟蹤誤差;
33、基于跟蹤誤差、滑模函數和實際橫擺角加速度表達式,推導所述滑模等效控制項,所述實際橫擺角速度表示式為基于二自由度車輛模型確定的。
34、在本技術實施例中,所述計算模塊,進一步用于:
35、基于卡爾曼濾波修正當前工況下車輛質心到前軸的距離和車輛質心到后軸的距離,以修正理想參考模型;
36、基于修正后的理想參考模型,根據所述縱向車速和所述方向盤轉角計算所述期望橫擺角速度。
37、在本技術實施例中,所述計算模塊,進一步用于:
38、基于卡爾曼濾波,獲取當前時刻對車輛質心到前軸距離的估計值和當前時刻對車輛質心到后軸距離的估計值;
39、將所述車輛質心到前軸距離的估計值作為所述理想參考模型中車輛質心到前軸距離的值,將所述車輛質心到后軸距離的估計值作為所述理想參考模型中車輛質心到后軸距離的值。
40、在本技術實施例中,所述計算模塊,進一步用于:
41、根據路面輸入模型、車輛對應的懸掛質量運動方程和車輛對應的非懸掛質量運動方程確定卡爾曼濾波算法對應的各個矩陣的參數,所述參數中包括系統狀態變量;
42、基于所述各個矩陣執行卡爾曼濾波算法,得到卡爾曼濾波算法估計的當前時刻系統狀態值;
43、根據所述卡爾曼濾波算法估計的當前時刻系統狀態值和所述非懸掛質量運動方程,計算當前時刻車輛懸架力的估計值;
44、根據所述懸掛質量運動方程、當前時刻所述車輛懸架力的估計值,計算所述車輛質心到前軸距離的估計值和所述車輛質心到后軸距離的估計值。
45、在本技術實施例中,所述理想參考模型為二自由度車輛模型。
46、一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,處理器執行計算機程序時,實現如上述車輛橫向響應補償方法的步驟。
47、一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如上述車輛橫向響應補償方法的步驟。
48、綜上,本技術提出了一種車輛橫向響應補償方法、裝置、電子設備以及存儲介質,本技術基于當前工況下車輛的縱向車速和方向盤轉角,利用理想參考模型獲取期望橫擺角速度,基于當前工況下車輛的實際橫擺角速度和新獲取的期望橫擺角速度,獲取補償轉角,根據補償轉角對車輛橫向響應進行補償。本技術從當前工況下車輛的實際狀態和實際響應量出發,對車輛的橫向響應進行補償,能夠更直接、準確地消除實際響應與期望響應之間的誤差,提高響應補償效率和補償效果。
- 還沒有人留言評論。精彩留言會獲得點贊!