控制后輪轉(zhuǎn)向的方法、裝置、車輛及存儲介質(zhì)與流程
本技術(shù)涉及車輛領(lǐng)域,并且更具體地,涉及車輛領(lǐng)域中的控制后輪轉(zhuǎn)向的方法、裝置、車輛及存儲介質(zhì)。
背景技術(shù):
1、目前,車輛的轉(zhuǎn)向控制通常由線控轉(zhuǎn)向系統(tǒng)(steering?by?wire,sbw)控制車輛的前輪轉(zhuǎn)向。但是線控轉(zhuǎn)向系統(tǒng)可能存在失效的情況。
2、對于搭載線控轉(zhuǎn)向系統(tǒng)的車輛,如果該線控轉(zhuǎn)向系統(tǒng)失效,該車輛將無法實現(xiàn)有效的轉(zhuǎn)向。考慮到該車輛行駛的安全性,此時能夠通過后輪對車輛的行駛軌跡進行控制,輔助車輛實現(xiàn)轉(zhuǎn)向需求。但是如何通過后輪實現(xiàn)前輪的轉(zhuǎn)向效果成為亟待解決的問題。
技術(shù)實現(xiàn)思路
1、本技術(shù)提供控制后輪轉(zhuǎn)向的方法、裝置、車輛及存儲介質(zhì),該方法不僅能夠在前輪線控轉(zhuǎn)向系統(tǒng)失效的情況下,通過后輪輔助車輛實現(xiàn)轉(zhuǎn)向需求,保證車輛行駛過程中車輛用戶的安全,還能達到與前輪轉(zhuǎn)向相同的轉(zhuǎn)向效果,符合車輛用戶的轉(zhuǎn)向習(xí)慣。
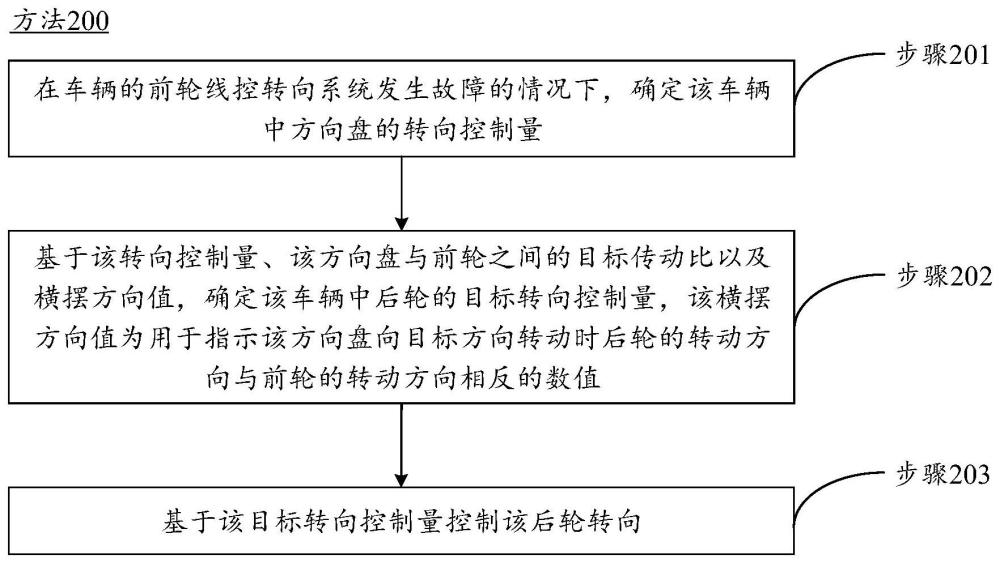
2、第一方面,提供了一種控制后輪轉(zhuǎn)向的方法,該方法包括:在車輛的前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,確定該車輛中方向盤的轉(zhuǎn)向控制量;基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定該車輛中后輪的目標(biāo)轉(zhuǎn)向控制量,該橫擺方向值為用于指示該方向盤向目標(biāo)方向轉(zhuǎn)動時后輪的轉(zhuǎn)動方向與前輪的轉(zhuǎn)動方向相反的數(shù)值;基于該目標(biāo)轉(zhuǎn)向控制量控制該后輪轉(zhuǎn)向。
3、上述技術(shù)方案中,在車輛的前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,前輪線控轉(zhuǎn)向系統(tǒng)不能控制前輪來實現(xiàn)車輛轉(zhuǎn)向。因此,需要后輪介入以實現(xiàn)車輛轉(zhuǎn)向。該方案在前輪線控轉(zhuǎn)向系統(tǒng)失效時,確定該車輛中方向盤的轉(zhuǎn)向控制量;基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定后輪的目標(biāo)轉(zhuǎn)向控制量。由于前輪轉(zhuǎn)向會產(chǎn)生橫擺,該橫擺是由于車輪的滾動阻力而引起的,因此,該方案在確定后輪的目標(biāo)轉(zhuǎn)向控制量的過程中,引入橫擺方向值。這能夠使得后輪轉(zhuǎn)向時產(chǎn)生的橫擺與前輪轉(zhuǎn)向時產(chǎn)生的橫擺相同,產(chǎn)生同樣的轉(zhuǎn)向效果。在確定該目標(biāo)轉(zhuǎn)向控制量的過程中,可基于該轉(zhuǎn)向控制量和該目標(biāo)傳動比,確定后輪轉(zhuǎn)動的目標(biāo)角度值。因此,該方案不僅能夠在前輪線控轉(zhuǎn)向系統(tǒng)失效的情況下,通過后輪輔助車輛實現(xiàn)轉(zhuǎn)向需求,保證車輛行駛過程中車輛上用戶的安全,還能達到與前輪轉(zhuǎn)向相同的轉(zhuǎn)向效果,符合車輛用戶的轉(zhuǎn)向習(xí)慣。
4、結(jié)合第一方面,在某些可能的實現(xiàn)方式中,該前輪線控轉(zhuǎn)向系統(tǒng)包括方向盤模塊和線控轉(zhuǎn)向執(zhí)行模塊,該車輛的前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的確定方法包括:在第一預(yù)設(shè)時長內(nèi)接收到該方向盤模塊發(fā)送的第一故障狀態(tài)信號的次數(shù)大于第一預(yù)設(shè)次數(shù)的情況下,確定該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障;和/或,在第二預(yù)設(shè)時長內(nèi)接收到該線控轉(zhuǎn)向執(zhí)行模塊發(fā)送的第二故障狀態(tài)信號的次數(shù)大于第二預(yù)設(shè)次數(shù)的情況下,確定該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障。
5、上述技術(shù)方案中,車輛中的前輪線控轉(zhuǎn)向系統(tǒng)包括方向盤模塊和線控轉(zhuǎn)向執(zhí)行模塊。該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障往往是方向盤模塊和/或線控轉(zhuǎn)向執(zhí)行模塊發(fā)生故障,因此可通過在第一預(yù)設(shè)時長內(nèi)是否接收到該方向盤模塊發(fā)送的第一故障狀態(tài)信號的次數(shù)大于第一預(yù)設(shè)次數(shù);和/或,在第二預(yù)設(shè)時長內(nèi)是否接收到該線控轉(zhuǎn)向執(zhí)行模塊發(fā)送的第二故障狀態(tài)信號的次數(shù)大于第二預(yù)設(shè)次數(shù),來確定該前輪線控轉(zhuǎn)向系統(tǒng)是否發(fā)生故障。
6、結(jié)合第一方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,確定該車輛中方向盤的轉(zhuǎn)向控制量,包括:在該前輪線控轉(zhuǎn)向系統(tǒng)中的方向盤模塊未發(fā)生故障的情況下,通過該方向盤模塊中的轉(zhuǎn)角傳感器確定該轉(zhuǎn)向控制量;在該方向盤模塊發(fā)生故障的情況下,通過該車輛的控制器局域網(wǎng)從目標(biāo)系統(tǒng)獲取該轉(zhuǎn)向控制量,該目標(biāo)系統(tǒng)用于確定該轉(zhuǎn)向控制量。
7、上述技術(shù)方案中,該前輪線控轉(zhuǎn)向系統(tǒng)包括方向盤模塊和線控轉(zhuǎn)向執(zhí)行模塊,該方向盤模塊包括方向盤和轉(zhuǎn)角傳感器,該方向盤與該轉(zhuǎn)角傳感器連接。在該方向盤模塊未發(fā)生故障的情況下,該方向盤模塊中的各個車輛部件是可正常工作的,因此可通過該轉(zhuǎn)角傳感器確定該方向盤的轉(zhuǎn)向控制量。該方案能夠確定準(zhǔn)確的轉(zhuǎn)向控制量,進而得到準(zhǔn)確的目標(biāo)轉(zhuǎn)向控制量以更準(zhǔn)確地控制后輪轉(zhuǎn)向。而在該方向盤模塊發(fā)生故障的情況下,可通過整車can線(車輛的控制器局域網(wǎng))獲取其他系統(tǒng)確定的轉(zhuǎn)向控制量。該方案能夠避免在該方向盤模塊發(fā)生故障的情況下,無法確定該方向盤的轉(zhuǎn)向控制量的過程。
8、結(jié)合第一方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定該車輛中后輪的目標(biāo)轉(zhuǎn)向控制量,包括:將該轉(zhuǎn)向控制量與該目標(biāo)傳動比之間的比值確定為第一角度;將該第一角度與該橫擺方向值之間的乘積確定為該目標(biāo)轉(zhuǎn)向控制量。
9、結(jié)合第一方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,基于該目標(biāo)轉(zhuǎn)向控制量控制該后輪轉(zhuǎn)向,包括:基于該目標(biāo)轉(zhuǎn)向控制量,確定該后輪轉(zhuǎn)動時的目標(biāo)方向和該后輪轉(zhuǎn)動時的目標(biāo)角度值;控制該后輪向該目標(biāo)方向轉(zhuǎn)動該目標(biāo)角度值。
10、上述技術(shù)方案中,通常情況下在確定車輪轉(zhuǎn)動之前,需要確定該車輪的轉(zhuǎn)動方向和轉(zhuǎn)動角度(值)。因此,該方案基于該目標(biāo)轉(zhuǎn)向控制量,確定后輪轉(zhuǎn)動時的目標(biāo)方向和該后輪轉(zhuǎn)動時的目標(biāo)角度值;進而控制該后輪向該目標(biāo)方向轉(zhuǎn)動該目標(biāo)角度值。也就是說,在前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,以實際轉(zhuǎn)動后輪來等同前輪轉(zhuǎn)動的效果,來滿足車輛用戶對于車輛的轉(zhuǎn)向需求和符合車輛用戶的轉(zhuǎn)向習(xí)慣。
11、結(jié)合第一方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,在車輛的前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,確定該車輛中方向盤的轉(zhuǎn)向控制量,包括:在該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,控制該方向盤可轉(zhuǎn)動的最大轉(zhuǎn)角值;在該最大轉(zhuǎn)角值限制的情況下,響應(yīng)于對該方向盤的轉(zhuǎn)動操作,確定該方向盤的轉(zhuǎn)向控制量。
12、上述技術(shù)方案中,為了提高在轉(zhuǎn)向時車輛車身的穩(wěn)定性,往往會限制后輪轉(zhuǎn)向時的最大轉(zhuǎn)動角度值。由于該方案中后輪的目標(biāo)轉(zhuǎn)向控制量是與方向盤的轉(zhuǎn)向控制量相關(guān)的,轉(zhuǎn)向控制量具體為轉(zhuǎn)動角度值和轉(zhuǎn)動方向,因此可通過控制該方向盤可轉(zhuǎn)動的最大轉(zhuǎn)角值,來間接達到限制后輪轉(zhuǎn)向時的最大轉(zhuǎn)動角度值。即在該最大轉(zhuǎn)角值限制的情況下,響應(yīng)于對該方向盤的轉(zhuǎn)動操作,確定該方向盤的轉(zhuǎn)向控制量。從而基于該目標(biāo)轉(zhuǎn)向控制量控制該后輪轉(zhuǎn)向,使得車輛在轉(zhuǎn)向的過程中,保持車身穩(wěn)定,不容易發(fā)生失控。
13、結(jié)合第一方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該方法還包括:檢測該車輛中的后輪轉(zhuǎn)向系統(tǒng)是否發(fā)生故障;在該后輪轉(zhuǎn)向系統(tǒng)未發(fā)生故障的情況下,執(zhí)行基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定該車輛中后輪的目標(biāo)轉(zhuǎn)向控制量的步驟。
14、上述技術(shù)方案中,相當(dāng)于在通過后輪實現(xiàn)車輛的轉(zhuǎn)向過程之前,檢測該車輛中的后輪轉(zhuǎn)向系統(tǒng)是否發(fā)生故障。在該后輪轉(zhuǎn)向系統(tǒng)未發(fā)生故障的情況下,才確定后輪的目標(biāo)轉(zhuǎn)向控制量。該方案能夠避免在該后輪轉(zhuǎn)向系統(tǒng)發(fā)生故障時,還確定該目標(biāo)轉(zhuǎn)向控制量的過程,這能夠避免計算資源浪費的問題。
15、第二方面,提供了一種控制后輪轉(zhuǎn)向的裝置,該裝置包括:確定模塊,用于:在車輛的前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,確定該車輛中方向盤的轉(zhuǎn)向控制量;基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定該車輛中后輪的目標(biāo)轉(zhuǎn)向控制量,該橫擺方向值為用于指示該方向盤向目標(biāo)方向轉(zhuǎn)動時后輪的轉(zhuǎn)動方向與前輪的轉(zhuǎn)動方向相反的數(shù)值;控制模塊,用于基于該目標(biāo)轉(zhuǎn)向控制量控制該后輪轉(zhuǎn)向。
16、結(jié)合第二方面,在某些可能的實現(xiàn)方式中,該前輪線控轉(zhuǎn)向系統(tǒng)包括方向盤模塊和線控轉(zhuǎn)向執(zhí)行模塊,該確定模塊,具體用于:在第一預(yù)設(shè)時長內(nèi)接收到該方向盤模塊發(fā)送的第一故障狀態(tài)信號的次數(shù)大于第一預(yù)設(shè)次數(shù)的情況下,確定該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障;和/或,在第二預(yù)設(shè)時長內(nèi)接收到該線控轉(zhuǎn)向執(zhí)行模塊發(fā)送的第二故障狀態(tài)信號的次數(shù)大于第二預(yù)設(shè)次數(shù)的情況下,確定該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障。
17、結(jié)合第二方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該確定模塊,具體還用于:在該前輪線控轉(zhuǎn)向系統(tǒng)中的方向盤模塊未發(fā)生故障的情況下,通過該方向盤模塊中的轉(zhuǎn)角傳感器確定該轉(zhuǎn)向控制量;在該方向盤模塊發(fā)生故障的情況下,通過該車輛的控制器局域網(wǎng)從目標(biāo)系統(tǒng)獲取該轉(zhuǎn)向控制量,該目標(biāo)系統(tǒng)用于確定該轉(zhuǎn)向控制量。
18、結(jié)合第二方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該確定模塊,具體還用于:將該轉(zhuǎn)向控制量與該目標(biāo)傳動比之間的比值確定為第一角度;將該第一角度與該橫擺方向值之間的乘積確定為該目標(biāo)轉(zhuǎn)向控制量。
19、結(jié)合第二方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該確定模塊,還用于基于該目標(biāo)轉(zhuǎn)向控制量,確定該后輪轉(zhuǎn)動時的目標(biāo)方向和該后輪轉(zhuǎn)動時的目標(biāo)角度值;該控制模塊,具體用于控制該后輪向該目標(biāo)方向轉(zhuǎn)動該目標(biāo)角度值。
20、結(jié)合第二方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該控制模塊,還用于在該前輪線控轉(zhuǎn)向系統(tǒng)發(fā)生故障的情況下,控制該方向盤可轉(zhuǎn)動的最大轉(zhuǎn)角值;該確定模塊,具體還用于在該最大轉(zhuǎn)角值限制的情況下,響應(yīng)于對該方向盤的轉(zhuǎn)動操作,確定該方向盤的轉(zhuǎn)向控制量。
21、結(jié)合第二方面和上述實現(xiàn)方式,在某些可能的實現(xiàn)方式中,該裝置還包括:檢測模塊,用于檢測該車輛中的后輪轉(zhuǎn)向系統(tǒng)是否發(fā)生故障;該確定模塊,還用于在該后輪轉(zhuǎn)向系統(tǒng)未發(fā)生故障的情況下,執(zhí)行基于該轉(zhuǎn)向控制量、該方向盤與前輪之間的目標(biāo)傳動比以及橫擺方向值,確定該車輛中后輪的目標(biāo)轉(zhuǎn)向控制量的步驟。
22、第三方面,提供一種車輛,包括存儲器、處理器以及存儲在該存儲器中并在該處理器上運行的計算機程序,其中,該處理器執(zhí)行該計算機程序時,使得該車輛執(zhí)行上述第一方面或第一方面任意一種可能的實現(xiàn)方式中的方法。
23、第四方面,提供了一種計算機可讀存儲介質(zhì),該計算機可讀存儲介質(zhì)中存儲有指令,當(dāng)該指令在計算機或處理器上運行時,使得該計算機或處理器執(zhí)行上述第一方面或第一方面任意一種可能的實現(xiàn)方式中的方法。
- 還沒有人留言評論。精彩留言會獲得點贊!