高自由度雙腿輪足機器人裝置、控制裝置及控制方法
本技術涉及智能機器人領域,尤指一種高自由度雙腿輪足機器人裝置、控制裝置及控制方法。
背景技術:
1、隨著人工智能技術的迅猛發展,人工智能技術也為工業生產和日常生活注入了愈發鮮活的機器智能。在人類社會的自動化和智能化進程中,社會生產迫切需要高運動性能和作業性能的通用機器人,作為算法載體,輔助人類完成工作。而通用人工智能與通用機器人的結合,將會極大拓寬機器人的應用領域,提高其在工業生產、醫療健康、生活服務等工況下的效率與價值,阿西莫夫筆下的機器人世界也將逐步照進現實。
2、人的生產生活場景高度復雜且非結構化,雙足機器人和人類形態相仿,其主要設計目標是“模仿人類的雙足運動,使機器人在速度、穩定性、靈活性、能源效率上”模仿、靠近,乃至超越人類,是未來通用機器人的可能方案。
3、近年來,輪足機器人受到了廣泛的研究關注。作為新型移動平臺,輪足機器人兼具輪式之高效與足式之靈活,融合了兩者的優勢。它不僅能夠在平坦的地形上快速靈活地移動,同時還能有效地越過障礙物,其優越的運動性能具有解決復雜現實環境(如家庭場景、助殘應用等)中的運動、輸送、導航等重要問題的潛力,因此被認為是具有廣泛應用前景的研究對象。然而,現有的輪足機器人在髖關節處通常只有1或2個自由度,這種結構限制了機器人的橫向行走和避障滑動等任務。例如,蘇黎世聯邦理工學院的ascento全身僅有4個自由度,其腿部(2dofs)只能實現矢狀面內的曲線運動,不能進行繞矢狀軸的運動,所以難以在側向傾斜的斜坡上行駛;對于水平面內的特殊運動指令(如向左前方運動),ascento必須通過差速轉彎實現,即必須產生額外的身體轉動和改變身體的朝向,因此不能滿足某些特殊的避障和拍攝要求;ollie機器人則采用五桿機構,單腿具有3自由度,可以在可行域中實現矢狀面內的自由運動,腿部運動更加靈活,但由于其腿部的運動平面正交于冠狀面和橫斷面,在更復雜的運動任務下仍有局限。
技術實現思路
1、本技術目的在于提供一種高自由度雙腿輪足機器人裝置、控制裝置及控制方法,通過機構-控制-算法的創新,開發出針對高自由度輪足機器人的高性能控制算法,實現滑行、跳躍等類人運動,以應用于物流運輸、特種作業、生活服務等場景。
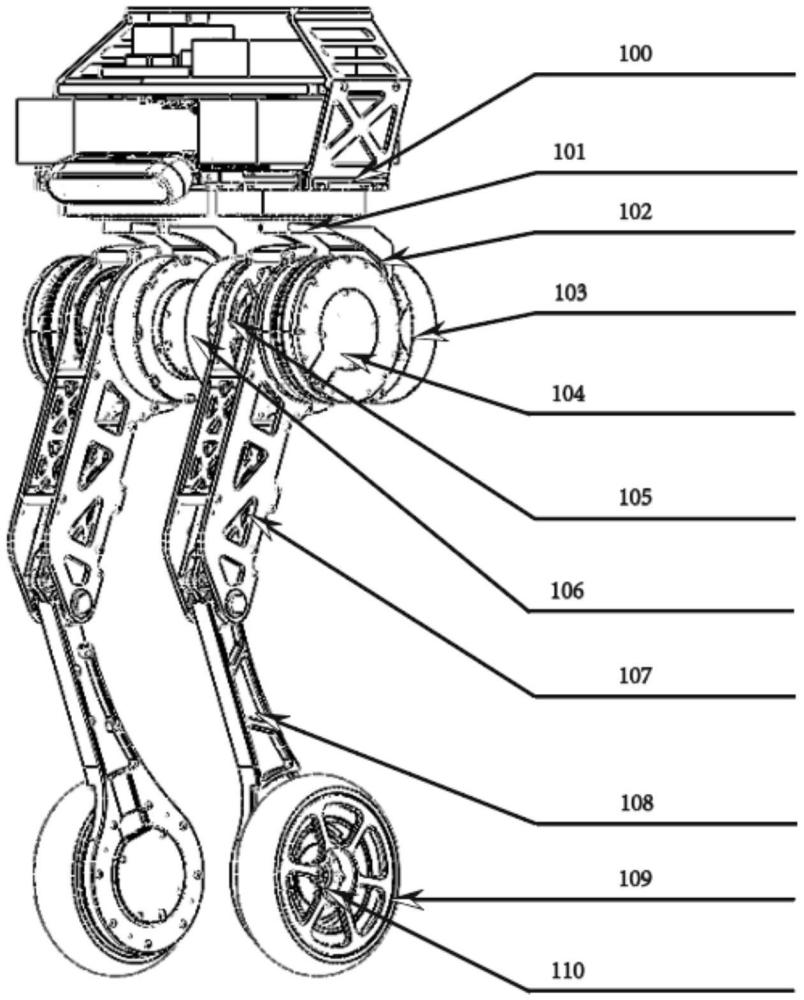
2、為達上述目的,本技術所提供的一種高自由度雙腿輪足機器人裝置,所述裝置包含機器人基座和至少兩個腿部組件;所述腿部組件包含髖關節機構和機械輪足,所述機器人基座一側通過所述髖關節機構與所述機械輪足相連,用于通過所述機械輪足帶動安設于所述機器人基座另一側的機器人軀體移動;其中,所述髖關節機構包含通過多個轉動組件構成類球鉸結構,所述轉動組件用于根據接收到的控制指令帶動所述機械輪足相對于所述機器人基座沿偏航角度、滾動角度和俯仰角度轉動。
3、在上述高自由度雙腿輪足機器人裝置中,可選的,所述髖關節機構包含偏航連桿、滾動連桿、大腿連桿、第一驅動電機、第二驅動電機和第三驅動電機;所述第一驅動電機固定側設置于所述機器人基座,旋轉側與所述偏航連桿一側相連,用于根據接收到的控制指令帶動所述偏航連桿沿所述機器人基座的偏航角度轉動;所述第二驅動電機固定側設置于所述偏航連桿另一側,旋轉側與所述滾動連桿一側相連,用于根據接收到的控制指令帶動所述滾動連桿沿所述機器人基座的滾動角度轉動;所述第三驅動電機固定側設置于所述滾動連桿另一側,旋轉側與所述大腿連桿一側相連,用于根據接收到的控制指令帶動所述大腿連桿沿所述機器人基座的俯仰角度轉動。
4、在上述高自由度雙腿輪足機器人裝置中,可選的,所述機械輪足包含小腿連桿、足端輪、第四驅動電機和第五驅動電機;所述第四驅動電機固定側設置于所述大腿連桿另一側,旋轉側與所述小腿連桿一側相連,用于根據接收到的控制指令通過并聯機構帶動所述小腿連桿沿所述機器人基座的俯仰角度轉動;所述第五驅動電機固定側設置于所述小腿連桿另一側,旋轉側與足端輪的固定軸心相連,用于根據接收到的控制指令帶動所述足端輪沿順時針或逆時針轉動。
5、在上述高自由度雙腿輪足機器人裝置中,可選的,所述第四驅動電機與所述大腿連桿構成平行四邊形連桿機構;所述第一驅動電機、所述第二驅動電機、所述第三驅動電機、所述第四驅動電機和所述第五驅動電機均包含雙編碼器,所述雙編碼器用于接收外部提供的控制指令,以及反饋對應驅動電機的位置、速度和扭矩。
6、本技術還提供一種應用于所述的高自由度雙腿輪足機器人裝置的控制裝置,所述控制裝置包含慣性測量模塊和微控制模塊;所述慣性測量模塊用于采集所述高自由度雙腿輪足機器人裝置的運行狀態;所述微控制模塊用于通過混合通信方式提供外部設備與電機之間的通信通道;其中,所述微控制模塊包含第一微控制器和第二微控制器;所述第一微控制器與第一驅動電機、第二驅動電機和第四驅動電機通過控制器局域網總線通信連接,所述第二微控制器與第三驅動電機和第五驅動電機控制器局域網總線通信連接;所述第一微控制器、所述第二微控制器和外部設備之間通過用于控制自動化技術的以太網通信,且所述第一微控制器和所述第二微控制器采用并聯連接方式進行數據傳遞。
7、本技術還提供一種應用于所述的高自由度雙腿輪足機器人裝置的控制方法,所述方法包含:獲取控制需求,根據所述控制需求解析獲得動作流程;根據所述動作流程拆解獲得一個或多個控制動作,根據所述控制動作的動作類型通過最優控制算法和強化學習法計算獲得控制參數;根據所述控制參數控制高自由度雙腿輪足機器人裝置完成對應動作。
8、在上述控制方法中,可選的,所述動作類型包含平衡滑行動作和行走動作;當所述控制動作為平衡滑行動作時,通過最優控制算法計算獲得控制參數;當所述控制動作為行走動作時,通過強化學習法計算獲得控制參數;其中,通過最優控制算法計算獲得控制參數包含:根據所述控制動作解析獲得目標數據,根據所述目標數據通過預設的線性二次型調節器計算獲得加權矩陣;根據所述加權矩陣通過預設控制律計算獲得控制參數;通過強化學習法計算獲得控制參數包含:根據所述控制動作解析獲得目標數據,根據所述目標數據通過近端策略優化算法構建的目標函數計算獲得對應的控制參數。
9、本技術還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現上述方法。
10、本技術還提供一種計算機可讀存儲介質,所述計算機可讀存儲介質存儲有執行上述方法的計算機程序。
11、本技術還提供一種計算機程序產品,包括計算機程序/指令,該計算機程序/指令被處理器執行時實現上述方法的步驟。
12、本技術的有益技術效果在于:通過本技術所提供的高自由度雙腿輪足機器人裝置所構成的雙足輪式機器人,在每個髖部分別具有3個自由度,這與人類相似,從而具有高度的靈活性能。同時,利用最優控制理論和強化學習控制,提出了控制模式和控制方法,使機器人能夠執行多模態運動。與其他機器人(包括腿式和輪式機器人)以及現有的雙足輪式機器人(如蘇黎世聯邦理工學院的ascento等)相比,該機器人的髖部自由度更多,結構更加復雜,而運動穩定性和靈活性增強。
- 還沒有人留言評論。精彩留言會獲得點贊!