一種船舶系泊狀態(tài)監(jiān)測(cè)預(yù)警方法與流程
本發(fā)明涉及船舶預(yù)警,更具體地說(shuō),它涉及一種船舶系泊狀態(tài)監(jiān)測(cè)預(yù)警方法。
背景技術(shù):
1、船舶系泊指的是船舶系泊是指船舶在靠泊碼頭、浮筒或錨地后,通過(guò)纜繩、系泊設(shè)備等手段將船體固定,以保持其穩(wěn)定性,防止漂移或意外移動(dòng)。
2、然而,船舶系泊受到潮水漲落、風(fēng)速風(fēng)向、水流流速及方向等多種因素的共同影響,導(dǎo)致船舶系泊狀態(tài)的動(dòng)態(tài)變化。現(xiàn)有技術(shù)難以應(yīng)對(duì)復(fù)雜且非線性的動(dòng)態(tài)變化,導(dǎo)致船舶系泊時(shí)的狀態(tài)不穩(wěn)定,影響運(yùn)輸作業(yè)。
技術(shù)實(shí)現(xiàn)思路
1、本發(fā)明提供一種船舶系泊狀態(tài)監(jiān)測(cè)預(yù)警方法,解決背景技術(shù)中提出的技術(shù)問(wèn)題。
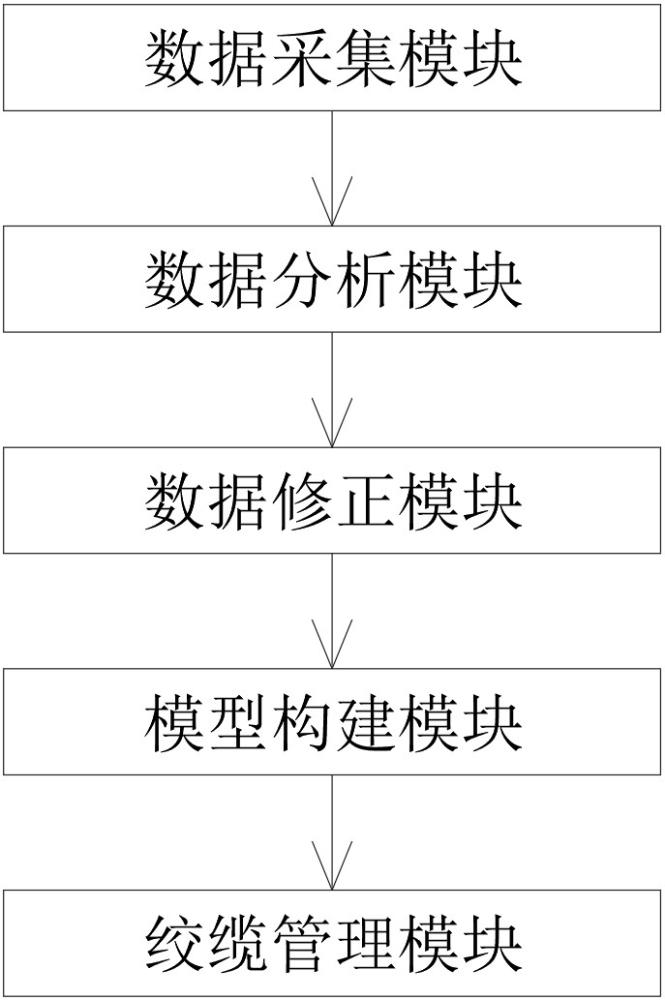
2、本發(fā)明提供了一種船舶系泊狀態(tài)監(jiān)測(cè)預(yù)警方法,包括:
3、數(shù)據(jù)采集模塊,用于在第一預(yù)設(shè)時(shí)間段內(nèi),按固定時(shí)間間隔對(duì)目標(biāo)系泊水域采集環(huán)境特征數(shù)據(jù)、目標(biāo)系泊水域中的船只的穩(wěn)定性數(shù)據(jù)和絞纜數(shù)據(jù);
4、環(huán)境特征數(shù)據(jù)包括:水流流向和水流流速、風(fēng)向和風(fēng)速以及水面高度;
5、穩(wěn)定性數(shù)據(jù)包括:加速度參數(shù)、角速度參數(shù)、傾角參數(shù)、gps參數(shù)、行駛速度、吃水深度和行駛方向;
6、絞纜數(shù)據(jù)包括:首尾纜、艏艉倒纜和艏艉春纜的長(zhǎng)度和張力;
7、數(shù)據(jù)分析模塊,用于根據(jù)穩(wěn)定性數(shù)據(jù)對(duì)目標(biāo)系泊水域中的系泊船只計(jì)算穩(wěn)定性評(píng)分;
8、數(shù)據(jù)修正模塊,用于基于目標(biāo)系泊水域中所有的船只構(gòu)建風(fēng)水拓?fù)洌⒒陲L(fēng)水拓?fù)浜铜h(huán)境特征數(shù)據(jù)對(duì)每只系泊船只生成對(duì)應(yīng)的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù);
9、模型構(gòu)建模塊,用于基于第一預(yù)設(shè)時(shí)間段內(nèi)的每只系泊船只的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù)、絞纜數(shù)據(jù)和對(duì)應(yīng)的穩(wěn)定性評(píng)分訓(xùn)練得到穩(wěn)定性預(yù)測(cè)模型;
10、絞纜管理模塊,用于在第二預(yù)設(shè)時(shí)間段內(nèi),基于穩(wěn)定性預(yù)測(cè)模型結(jié)合優(yōu)化算法對(duì)每個(gè)絞纜的長(zhǎng)度和張力進(jìn)行動(dòng)態(tài)管理。
11、進(jìn)一步的,計(jì)算穩(wěn)定性評(píng)分,計(jì)算公式如下:
12、;
13、其中,表示系泊船只的穩(wěn)定性評(píng)分,、和表示船只的第一穩(wěn)定權(quán)重、第二穩(wěn)定權(quán)重和第三穩(wěn)定權(quán)重,、和均不為0,且和值為1,表示系泊船只的加速度參數(shù),表示系泊船只的角速度參數(shù),表示系泊船只的傾角參數(shù)。
14、進(jìn)一步的,構(gòu)建風(fēng)水拓?fù)洌ǎ?/p>
15、加載一個(gè)模擬水面,模擬水面包括水面邊界和水域;
16、基于環(huán)境特征數(shù)據(jù)對(duì)水域配置:水流流向和流速,以及風(fēng)向和風(fēng)速;
17、基于目標(biāo)系泊水域?qū)λ孢吔缗渲茫盒螤睢⒋笮『偷谝凰傂院瘮?shù);
18、基于gps參數(shù)得到每只船只的位置坐標(biāo),并基于位置坐標(biāo)將每只船只作為一個(gè)拓?fù)潼c(diǎn)映射于水域中;
19、對(duì)每個(gè)拓?fù)潼c(diǎn)配置:剛性影響范圍,基于船只的行駛速度、吃水深度和行駛方向?qū)ο鄳?yīng)的剛性影響范圍配置:風(fēng)力剛性函數(shù)和第二水力剛性函數(shù),得到風(fēng)水拓?fù)洹?/p>
20、進(jìn)一步的,基于環(huán)境特征數(shù)據(jù)對(duì)水域配置,包括:
21、模擬水面基于矩陣結(jié)構(gòu)構(gòu)建,矩陣結(jié)構(gòu)包括第一通道和第二通道,第一通道和第二通道均包括相同數(shù)量的碰撞子;
22、針對(duì)矩陣結(jié)構(gòu)的第一通道和第二通道均定義有相同的水面邊界,并對(duì)水面邊界劃分為動(dòng)力源邊界和剛性源邊界;其中,動(dòng)力源邊界和剛性源邊界均由若干個(gè)碰撞子構(gòu)成,水域由剩余的碰撞子構(gòu)成;
23、針對(duì)第一通道中動(dòng)力源邊界的每個(gè)碰撞子,基于水流流向和水流流速配置水力碰撞方向和水力碰撞速度;針對(duì)第二通道中動(dòng)力源邊界的每個(gè)碰撞子,基于風(fēng)向和風(fēng)速配置風(fēng)力碰撞方向和風(fēng)力碰撞速度;
24、在第一通道或者第二通道中,若碰撞子i與任意一個(gè)具有碰撞方向和碰撞速度的碰撞子相鄰,且位于對(duì)應(yīng)的碰撞子的碰撞方向上,則得到碰撞子i的第一更新碰撞方向和第一更新碰撞速度,計(jì)算公式如下:
25、;
26、;
27、其中,表示碰撞子i的第一更新碰撞方向,表示碰撞子i的第一更新碰撞速度,表示碰撞子i的碰撞速度,表示碰撞子i的碰撞方向,表示碰撞子i+1的碰撞速度,表示碰撞子i+1的碰撞方向;
28、其中,i和i+1均為第一通道或者第二通道中碰撞子的索引,對(duì)于第一通道以及第二通道中水域的碰撞子的初始碰撞速度和初始碰撞方向均為0。
29、進(jìn)一步的,基于目標(biāo)系泊水域?qū)λ孢吔缗渲茫ǎ?/p>
30、獲取目標(biāo)系泊水域的碼頭邊界和水域邊界的形狀和大小,基于碼頭邊界和水域邊界的形狀和大小,并以預(yù)設(shè)縮放比例,分別在矩陣結(jié)構(gòu)的第一通道和第二通道中映射為剛性源邊界和動(dòng)力源邊界,>0;
31、其中,對(duì)剛性源邊界中的碰撞子配置第一水力剛性函數(shù);
32、在第一通道中,若碰撞子i的碰撞方向和碰撞速度均不為0,碰撞子i與任意一個(gè)剛性源邊界中的碰撞子相鄰,且對(duì)應(yīng)的碰撞子位于碰撞子i碰撞方向上,則基于第一水力剛性函數(shù)得到碰撞子i的第二更新碰撞方向和第二更新碰撞速度,第一水力剛性函數(shù)的計(jì)算公式如下:
33、;
34、;
35、其中,表示碰撞子i的第二更新碰撞方向,表示碰撞子i的第二更新碰撞速度,表示碰撞子i的碰撞方向與碼頭邊界的夾角,表示第一速度衰減系數(shù)。
36、進(jìn)一步的,基于位置坐標(biāo)將每只船只作為一個(gè)拓?fù)潼c(diǎn)映射于水域中,包括:獲取每只船只的gps坐標(biāo),計(jì)算gps坐標(biāo)與目標(biāo)系泊水域的相對(duì)坐標(biāo),基于相對(duì)坐標(biāo)將對(duì)應(yīng)的船只貫穿映射于矩陣結(jié)構(gòu)的第一通道和第二通道,具體為:替換矩陣結(jié)構(gòu)中第一通道和第二通道中第行第列的碰撞子為拓?fù)潼c(diǎn)。
37、進(jìn)一步的,對(duì)水域中的每個(gè)節(jié)點(diǎn)配置:剛性影響范圍,包括將剛性影響范圍定義為橢圓:
38、橢圓的中心點(diǎn)為:拓?fù)潼c(diǎn);
39、橢圓的半長(zhǎng)軸為:;其中,表示橢圓的半長(zhǎng)軸長(zhǎng)度,表示經(jīng)驗(yàn)系數(shù),,表示預(yù)設(shè)縮放比例,表示船只的吃水深度,表示船只的行駛速度;
40、橢圓的半短軸為:;其中,表示橢圓的半短軸長(zhǎng)度;
41、橢圓的半長(zhǎng)軸的傾斜角度為:船只的行駛方向;
42、基于對(duì)應(yīng)的橢圓在矩陣結(jié)構(gòu)的第一通道和第二通道中的覆蓋區(qū)域,將第一通道和第二通道中對(duì)應(yīng)的區(qū)域的碰撞子作為對(duì)應(yīng)的拓?fù)潼c(diǎn)的剛性影響范圍;
43、剛性影響范圍在第一通道中配置第二水力剛性函數(shù),剛性影響范圍在第二通道中配置風(fēng)力剛性函數(shù);
44、在第一通道中,若碰撞子i的碰撞方向和碰撞速度均不為0,碰撞子i與剛性影響范圍中任意一個(gè)碰撞子相鄰,且對(duì)應(yīng)的碰撞子位于碰撞子i碰撞方向上,則基于第二水力剛性函數(shù)得到碰撞子i的第三更新碰撞方向和第三更新碰撞速度,第二水力剛性函數(shù)的計(jì)算公式如下:
45、;
46、;
47、其中,表示第三更新碰撞方向,表示第三更新碰撞速度,表示水流流向和橢圓的半長(zhǎng)軸的夾角,表示第二速度衰減系數(shù);
48、在第二通道中,若碰撞子i的碰撞方向和碰撞速度均不為0,碰撞子i與剛性影響范圍中任意一個(gè)碰撞子相鄰,且對(duì)應(yīng)的碰撞子位于碰撞子i碰撞方向上,則基于風(fēng)力剛性函數(shù)得到碰撞子i的第四更新碰撞方向和第四更新碰撞速度,風(fēng)力剛性函數(shù)的計(jì)算公式如下:
49、;
50、;
51、其中,表示第四更新碰撞方向,表示第四更新碰撞速度,表示風(fēng)向和橢圓的半長(zhǎng)軸的夾角,表示第三速度衰減系數(shù)。
52、進(jìn)一步的,生成對(duì)應(yīng)的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù),包括:
53、步驟81,在第一預(yù)設(shè)時(shí)間段的每個(gè)時(shí)刻,構(gòu)建對(duì)應(yīng)的時(shí)刻的風(fēng)水拓?fù)洌?/p>
54、步驟82,對(duì)風(fēng)水拓?fù)渲芯仃嚱Y(jié)構(gòu)的第一通道和第二通道的動(dòng)力源邊界分別輸入對(duì)應(yīng)的時(shí)刻的水流流向和水流流速以及風(fēng)向和風(fēng)速,獲取系泊船只對(duì)應(yīng)的拓?fù)潼c(diǎn)的剛性影響范圍在第一通道和第二通道中相鄰的碰撞子的碰撞方向和碰撞速度,計(jì)算得到修正水流流向和修正水流流速,計(jì)算公式如下:
55、;
56、;
57、其中,表示修正水流流向,表示修正水流流速,表示第一通道內(nèi)剛性影響范圍相鄰的第m個(gè)碰撞子與對(duì)應(yīng)的拓?fù)潼c(diǎn)的歐氏距離,表示第一通道內(nèi)剛性影響范圍相鄰的第m個(gè)碰撞子的碰撞速度,表示第一通道內(nèi)剛性影響范圍相鄰的第m個(gè)碰撞子的碰撞方向,m表示第一通道內(nèi)剛性影響范圍相鄰的碰撞子的索引;
58、步驟83,在第二通道內(nèi)重復(fù)執(zhí)行步驟82,得到修正風(fēng)向和修正風(fēng)速;
59、步驟84,基于修正水流流向和修正水流流速以及修正風(fēng)向和修正風(fēng)速對(duì)環(huán)境特征數(shù)據(jù)進(jìn)行替換,得到對(duì)應(yīng)的系泊船只的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù)。
60、進(jìn)一步的,訓(xùn)練得到穩(wěn)定性預(yù)測(cè)模型,包括:
61、在第一預(yù)設(shè)時(shí)間段內(nèi),將第k個(gè)時(shí)刻第j只船只的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù)和絞纜數(shù)據(jù)合并進(jìn)行歸一化處理后構(gòu)建特征向量,將特征向量作為樣本數(shù)據(jù),將第k個(gè)時(shí)刻第j只船只的穩(wěn)定性評(píng)分作為樣本標(biāo)簽,以訓(xùn)練得到穩(wěn)定性預(yù)測(cè)模型;
62、其中,穩(wěn)定性預(yù)測(cè)模型基于1d卷積神經(jīng)網(wǎng)絡(luò)構(gòu)建,并通過(guò)均方誤差損失函數(shù)對(duì)1d卷積神經(jīng)網(wǎng)絡(luò)的權(quán)重參數(shù)和偏置參數(shù)進(jìn)行反向更新。
63、進(jìn)一步的,動(dòng)態(tài)管理,包括:
64、步驟101,在第二預(yù)設(shè)時(shí)間段的第s個(gè)時(shí)刻,獲取第s個(gè)時(shí)刻的環(huán)境特征數(shù)據(jù),并生成目標(biāo)系泊船只的標(biāo)準(zhǔn)環(huán)境數(shù)據(jù);
65、步驟102,初始化生成若干個(gè)符合約束條件的個(gè)體種群;
66、步驟103,個(gè)體的編碼基于首尾纜、艏艉倒纜和艏艉春纜的長(zhǎng)度和張力構(gòu)建,表示為:;其中,分別表示首尾纜、艏艉倒纜和艏艉春纜的長(zhǎng)度,分別表示首尾纜、艏艉倒纜和艏艉春纜的張力;
67、步驟104,約束條件為:對(duì)于首尾纜、艏艉倒纜和艏艉春纜的長(zhǎng)度均小于等于對(duì)應(yīng)的纜長(zhǎng),對(duì)于首尾纜、艏艉倒纜和艏艉春纜的張力均小于等于預(yù)設(shè)張力閾值;
68、步驟105,將標(biāo)準(zhǔn)環(huán)境數(shù)據(jù)分別和每個(gè)個(gè)體的編碼進(jìn)行合并并歸一化處理,得到個(gè)體的遺傳向量;
69、步驟106,基于穩(wěn)定性預(yù)測(cè)模型得到每個(gè)遺傳向量的穩(wěn)定性評(píng)分;
70、步驟107,若穩(wěn)定性評(píng)分大于等于預(yù)設(shè)穩(wěn)定閾值,則保留對(duì)應(yīng)的個(gè)體的編碼,否則將對(duì)應(yīng)的個(gè)體的編碼作為父代進(jìn)行交叉和變異;
71、步驟108,重復(fù)執(zhí)行步驟105、步驟106和步驟107達(dá)到預(yù)設(shè)次數(shù),則輸出最高的穩(wěn)定性評(píng)分對(duì)應(yīng)的個(gè)體的編碼;
72、若最高的穩(wěn)定性評(píng)分小于預(yù)設(shè)穩(wěn)定閾值,則啟動(dòng)目標(biāo)船只的系泊預(yù)警,停止運(yùn)輸工作;
73、否則,基于對(duì)應(yīng)的個(gè)體的編碼,得到第s個(gè)時(shí)刻每個(gè)絞纜的長(zhǎng)度和張力。
74、本發(fā)明的有益效果在于:
75、1、通過(guò)實(shí)時(shí)采集環(huán)境和船只狀態(tài)數(shù)據(jù),并結(jié)合遺傳算法對(duì)每個(gè)絞纜進(jìn)行動(dòng)態(tài)優(yōu)化,從而實(shí)現(xiàn)了對(duì)系泊狀態(tài)的科學(xué)管理和調(diào)控,確保船只在動(dòng)態(tài)的環(huán)境下保持穩(wěn)定,抑或進(jìn)行危險(xiǎn)預(yù)警,顯著提升了船只的系泊安全性和運(yùn)輸效率,降低了因環(huán)境波動(dòng)引發(fā)的風(fēng)險(xiǎn)。
76、2、通過(guò)量化系泊水域中各船只之間的相互影響,構(gòu)建了基于風(fēng)水拓?fù)涞臉?biāo)準(zhǔn)環(huán)境數(shù)據(jù)生成模型,使得每艘船都能基于全局的環(huán)境參數(shù)獲得針對(duì)性的標(biāo)準(zhǔn)環(huán)境參數(shù)。基于這些修正后的數(shù)據(jù)訓(xùn)練得到的穩(wěn)定性預(yù)測(cè)模型,為船只的絞纜動(dòng)態(tài)優(yōu)化和預(yù)警提供了可靠依據(jù)。
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!