一種叉臂舉升結構及E型伸縮舉升AGV的制作方法
本技術涉及工業機器人領域,具體涉及一種叉臂舉升結構及e型伸縮舉升agv。
背景技術:
1、agv叉車主要由車架與叉臂組成,傳動的叉車舉升方式為垂直舉升,即通過舉升裝置驅動叉臂沿車架豎直升降,這種舉升方式的叉取物品的水平距離有限。為增加叉車的叉取距離,現有技術設計一種e型叉車,其叉臂可伸縮的設置在車架。這種叉車的叉臂一般采用剪叉機構進行驅動,剪叉機構需要通過滾珠絲桿進行驅動,其驅動結構復雜,不便于裝配,維護成本高。
技術實現思路
1、本實用新型的第一個發明目的在于解決現有的e型叉車的叉臂舉升驅動結構復雜,成本高的問題,提供一種結構簡單、驅動方式直接的叉臂舉升結構。
2、為實現以上發明目的,本實用新型采取以下技術方案:
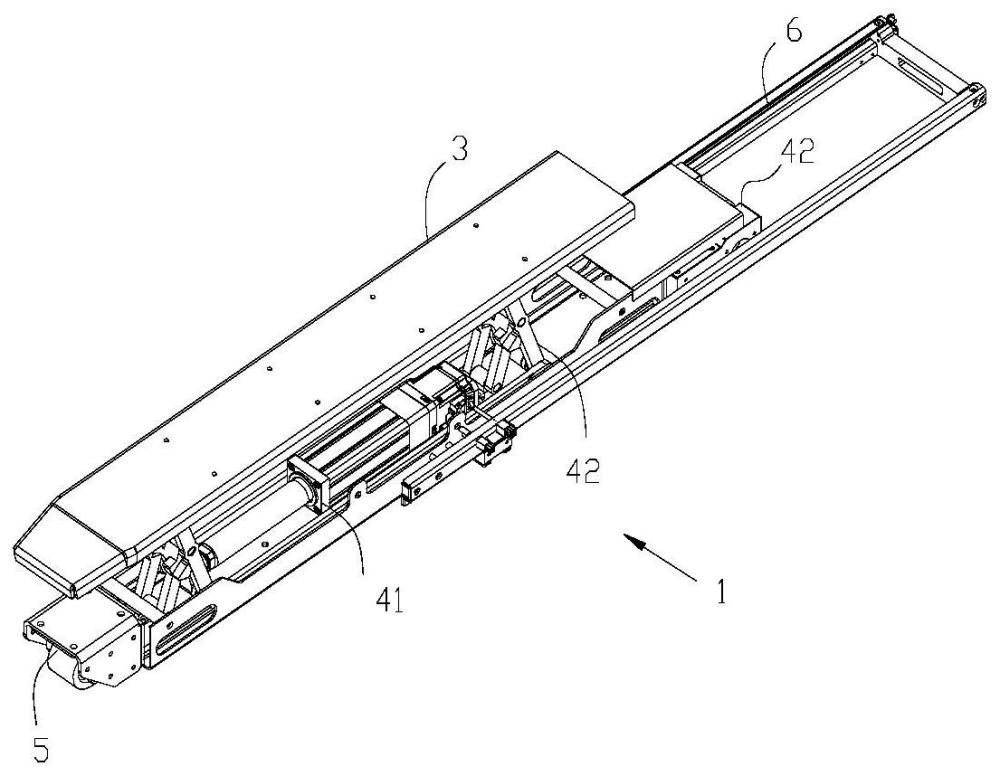
3、叉臂舉升結構,包括底架以及設于底架上的舉升托板、舉升裝置,所述舉升裝置包括驅動缸和兩組左右對稱設置的連桿機構,所述連桿機構連接于所述底架上側與舉升托板下側之間,所述驅動缸驅動所述連桿機構前后擺動,使舉升托板同步擺升或擺降。
4、本實用新型的叉臂舉升結構通過驅動缸驅動連桿機構擺動,達到控制舉升托板的高度目的。與現有技術相比,本實用新型的叉臂舉升結構的驅動方式簡單、直接,動作平穩、升降速度快。由于采用了連桿機構,使得整體結構具有較高的剛性和穩定性,能夠承受較大的負載,且結構簡單,便于裝配和維護。
5、進一步的,所述連桿機構連接于底架上側與舉升托板下側之間,其包括第一連桿、第二連桿和第一擺桿,所述第一連桿可前后移動地裝配于底架上,所述第二連桿固定設于舉升托板的下側,所述第一擺桿鉸接于第一連桿與第二連桿的前端、后端,所述驅動缸驅動第一連桿前后位移,從而驅動連桿機構擺動。本方案為連桿機構具體結構方案,本方案中,驅動缸驅動第一連桿前后位移,而使連桿機構整體擺動,達到控制舉升托板的目的。
6、進一步的,所述連桿機構還包括第二擺桿,所述第二擺桿的一端通過連接座可轉動的設于底架上,另一端與第一擺桿的中部可轉動連接與第一擺桿形成倒y形的結構。由于第一連桿前后位移時,第一擺桿的下端隨第一連桿同步位移,本方案中,第二擺桿對第一擺桿起支撐作用,同時限制第一擺桿的最大位移,使連桿結構更穩定。
7、進一步的,所述連桿機構包括第二轉軸,所述第二擺桿的上端位于兩個第一擺桿之間,所述第一擺桿、第二擺桿設有與第二轉軸適配的連接過孔,使兩個第二擺桿、第一擺桿通過第二轉軸串接。為簡化結構并提升兩側的連桿機構保持同步性,兩組連桿機構的第二擺桿設置為一體結構,兩個第二擺桿之間設有連接筋。進一步的,左右相對的兩個第二擺桿為一體結構,兩個第二擺桿之間設有連接筋。
8、進一步的,所述第二擺桿的上端設有限位凸部,所述限位凸部設有第一限位面和第二限位面,所述連桿機構擺升到位,所述第一擺桿與第一限位面相抵接,所述連桿機構擺降到位,所述第一擺桿與第二限位面相抵接。
9、進一步的,所述底架設有上端開口的安裝槽,所述舉升裝置設于安裝槽上,所述安裝槽相對兩側沿其長度方向設有滑槽,所述第一連桿可滑動地設于滑槽內。
10、進一步的,所述連桿機構包括第一轉軸,所述驅動缸的后端與后側的第二擺桿連接,前端與前側的第二擺桿連接,所述第一連桿、所述第一擺桿適配所述第一轉軸設有連接過孔,所述驅動缸的伸縮桿與第一轉軸的中部固定連接,兩端通過連接過孔依次連接第一擺桿和第一連桿。
11、進一步的,所述第二轉軸上設有滾輪。本方案的滾輪使第一連桿的滑動更順暢。
12、進一步的,所述底架的前后兩端裝配有腳輪機構。
13、進一步的,所述底座的左右兩側沿其長度方向設有導軌結構,以使叉臂可相對agv車體伸出和縮進。
14、本實用新型的另一個發明目的在于提供一種e型伸縮舉升agv,所述e型伸縮舉升agv裝配有上述方案的叉臂舉升結構。與現有技術相比,本實用新型的agv由于應用了上述的叉臂舉升結構方案,因此,具有上述方案的所有優點。
技術特征:
1.一種叉臂舉升結構,其特征在于,包括底架以及設于底架上的舉升托板、舉升裝置,所述舉升裝置包括驅動缸和兩組左右對稱設置的連桿機構,所述連桿機構連接于所述底架上側與所述舉升托板下側之間,所述驅動缸驅動所述連桿機構前后擺動,使所述舉升托板同步擺升或擺降。
2.根據權利要求1所述的叉臂舉升結構,其特征在于:所述連桿機構連接于所述底架上側與所述舉升托板下側之間,其包括第一連桿、第二連桿和第一擺桿,所述第一連桿可前后移動地裝配于所述底架上,所述第二連桿固定設于所述舉升托板的下側,所述第一擺桿連接于所述第一連桿與所述第二連桿的前端、后端之間,所述驅動缸驅動所述第一連桿前后位移,從而驅動所述連桿機構擺動。
3.根據權利要求2所述的叉臂舉升結構,其特征在于:所述連桿機構還包括第二擺桿,所述第二擺桿的下端通過連接座可轉動地設于所述底架上,上端與所述第一擺桿的中部可轉動地連接,并形成倒y形結構。
4.根據權利要求3所述的叉臂舉升結構,其特征在于:所述連桿機構包括第二轉軸,所述第二擺桿的上端位于兩個第一擺桿之間,且所述第一擺桿、第二擺桿設有與第二轉軸適配的連接過孔,使兩組連桿機構的第一擺桿、第二擺桿通過所述第二轉軸串接;和/或,兩組連桿機構的所述第二擺桿為一體結構,兩個第二擺桿之間設有連接筋。
5.根據權利要求3所述的叉臂舉升結構,其特征在于:所述第二擺桿的上端設有限位凸部,所述限位凸部設有第一限位面和第二限位面,所述連桿機構擺升到位,所述第一擺桿與所述第一限位面相抵接,所述連桿機構擺降到位,所述第一擺桿與所述第二限位面相抵接。
6.根據權利要求3所述的叉臂舉升結構,其特征在于:所述底架設有上端開口的安裝槽,所述舉升裝置設于所述安裝槽上,所述安裝槽相對兩側沿其長度方向設有滑槽,所述第一連桿可滑動地設于所述滑槽內。
7.根據權利要求3所述的叉臂舉升結構,其特征在于:所述連桿機構包括第一轉軸,所述驅動缸的后端與后側的所述第二擺桿連接,前端與前側的第二擺桿連接,所述第一連桿、所述第一擺桿適配所述第一轉軸設有連接過孔,所述驅動缸的伸縮桿與所述第一轉軸的中部固定連接,兩端通過連接過孔依次連接所述第一擺桿和所述第一連桿。
8.根據權利要求4所述的叉臂舉升結構,其特征在于:所述第二轉軸上設有滾輪。
9.根據權利要求1所述的叉臂舉升結構,其特征在于:所述底架的前后兩端裝配有腳輪機構。
10.e型伸縮舉升agv,其特征在于:所述e型伸縮舉升agv裝配有根據權利要求1-9任一項所述的叉臂舉升結構。
技術總結
本技術公開了一種叉臂舉升結構及E型伸縮舉升AGV,叉臂舉升結構包括底架以及設于底架上的舉升托板、舉升裝置,所述舉升裝置包括驅動缸和兩組左右對稱設置的連桿機構,所述連桿機構連接于所述底架上側與舉升托板下側之間,所述驅動缸驅動所述連桿機構前后擺動,使舉升托板同步擺升或擺降。另外,本技術的E型伸縮舉升AGV應用了本技術的叉臂舉升結構。本技術的叉臂舉升結構的驅動方式簡單、直接,動作平穩、升降速度快。由于采用了連桿機構,使得整體結構具有較高的剛性和穩定性,能夠承受較大的負載,且結構簡單,便于裝配和維護。
技術研發人員:崔俊健,鄭楚鑫,夏應文
受保護的技術使用者:廣東嘉騰機器人自動化有限公司
技術研發日:20240327
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!