一種電梯無接觸呼梯的人體檢測方法
本公開涉及乘客電梯,特別是涉及一種電梯無接觸呼梯的人體檢測方法。
背景技術:
1、隨著人們生活水平的提高和智能化進程的不斷推進,智能電梯應運而生,尤其是能夠實現無接觸呼梯,不僅能避免病毒的傳播,還使人們的生活更加舒適和便捷。相關技術中,有使用高清攝像頭和紅外實現無接觸呼梯的方案,也有使用智能聲控系統實現無接觸呼梯的方案,還有使用雷達實現無接觸呼梯的方案,但這些方案都較易受周邊環境影響導致誤觸發。
技術實現思路
1、以下是對本公開詳細描述的主題的概述。本概述并非是為了限制權利要求的保護范圍。
2、本公開實施例提供了一種電梯無接觸呼梯的人體檢測方法,能夠提高呼梯觸發的精確性,提高呼梯觸發的穩定性和可靠性。
3、本公開的第一方面的實施例,一種電梯無接觸呼梯的人體檢測方法,包括:
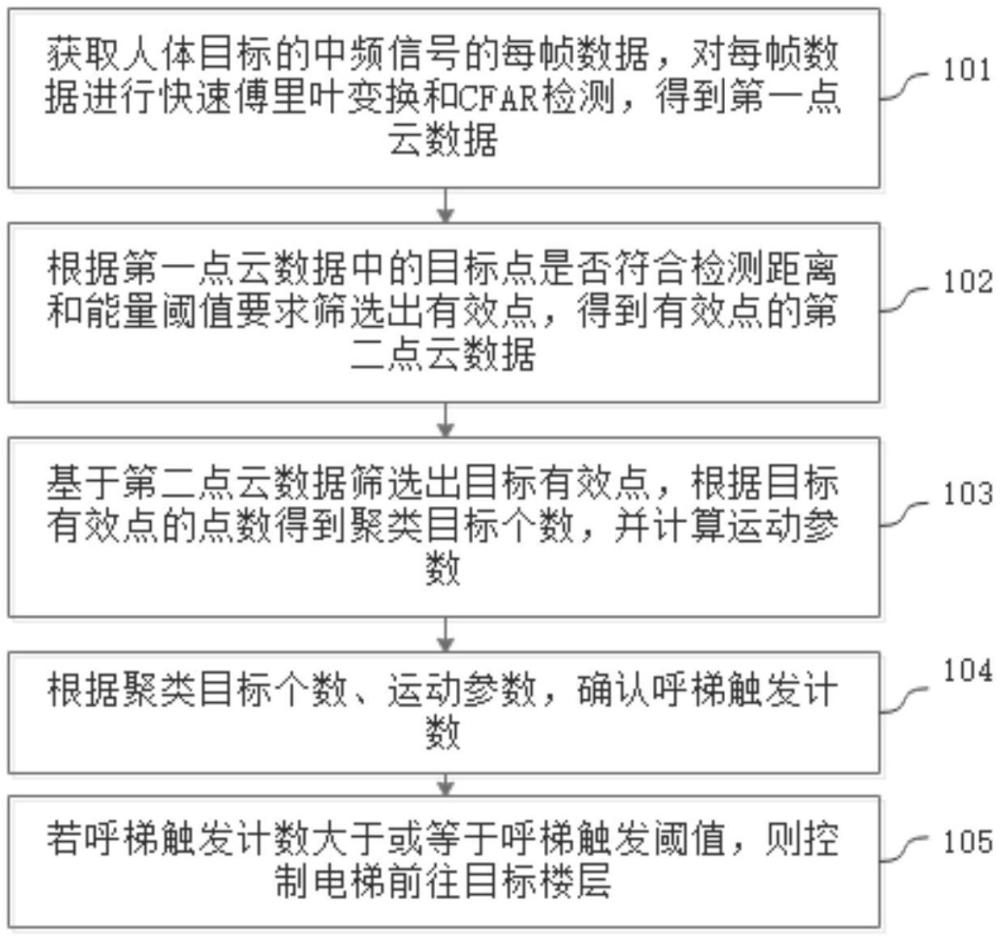
4、獲取人體目標的中頻信號的每幀數據,對所述每幀數據進行快速傅里葉變換和cfar檢測,得到第一點云數據;
5、根據所述第一點云數據中的目標點是否符合檢測距離和能量閾值要求篩選出有效點,得到所述有效點的第二點云數據;
6、基于所述第二點云數據篩選出目標有效點,根據所述目標有效點的點數得到聚類目標個數,并計算運動參數;
7、根據所述聚類目標個數、所述運動參數,確認呼梯觸發計數;
8、若所述呼梯觸發計數大于或等于呼梯觸發閾值,則控制電梯前往目標樓層。
9、根據本公開的第一方面的某些實施例,所述中頻信號具有多個參考通道,所述每幀數據包括多個所述參考通道對應的子數據,所述對所述每幀數據進行快速傅里葉變換和cfar檢測,得到第一點云數據,包括:
10、對各個所述參考通道對應的所述子數據,進行一維快速傅里葉變換、二維快速傅里葉變換得到各個所述參考通道對應的距離與多普勒二維矩陣;
11、對檢測通道對應的所述距離與多普勒二維矩陣取模后進行所述cfar檢測,得到第三點云數據,其中,所述檢測通道是基于預設條件從多個所述參考通道中確定的;
12、基于所述第三點云數據對各個所述參考通道對應的所述距離與多普勒二維矩陣依次進行三維快速傅里葉變換、四維快速傅里葉變換,得到第四點云數據;
13、對所述第三點云數據和所述第四點云數據進行坐標轉換,得到所述第一點云數據。
14、根據本公開的第一方面的某些實施例,所述第一點云數據包括目標點集合、所述目標點的第一距離橫向分量、所述目標點的第一距離縱向分量、所述目標點的第一距離高度分量、所述目標點的第一速度、所述目標點的第一能量;
15、所述檢測距離和能量閾值包括橫向最大檢測距離、縱向最小檢測距離、縱向最大檢測距離、最小檢測高度、最大檢測高度、目標點能量閾值;
16、所述根據所述第一點云數據中的目標點是否符合檢測距離和能量閾值要求篩選出有效點,得到所述有效點的第二點云數據,包括:
17、若所述目標點集合中的所述目標點的所述第一距離橫向分量在閉區間所述橫向最大檢測距離的負值到所述橫向最大檢測距離的正值之間、所述第一距離縱向分量在閉區間所述縱向最小檢測距離到所述縱向最大檢測距離之間、所述第一距離高度分量在閉區間所述最小檢測高度到所述最大檢測高度之間、所述第一能量大于或等于所述目標點能量閾值,則將對應所述目標點設為有效點,將所述有效點組成有效點集合,基于對應所述目標點的所述第一距離橫向分量、對應所述目標點的所述第一距離縱向分量、對應所述目標點的所述第一速度、對應所述目標點的所述第一能量得到所述有效點的第二距離橫向分量、所述有效點的第二距離縱向分量、所述有效點的第二速度、所述有效點的第二能量,將所述有效點集合、所述第二距離橫向分量、所述第二距離縱向分量、所述第二速度、所述第二能量組成所述第二點云數據。
18、根據本公開的第一方面的某些實施例,所述運動參數包括所述目標有效點的橫向加權平均距離、所述目標有效點的縱向加權平均距離、所述目標有效點的加權平均速度;
19、所述基于所述第二點云數據篩選出目標有效點,根據所述目標有效點的點數得到聚類目標個數,并計算運動參數,包括:
20、基于所述第二點云數據,第一次迭代從所述有效點集合中篩選出所述第二能量最大且聚類標志為0的所述有效點作為質心點,從所述有效點集合中篩選出與所述質心點相差預設距離范圍內的所述有效點作為關聯距離點,將所述質心點和所述關聯距離點作為所述目標有效點,并將所述質心點和所述關聯距離點對應的所述有效點的所述聚類標志置1;
21、統計此次迭代的所述目標有效點的所述點數,若所述點數大于或等于2,則聚類目標個數加1,并計算此次迭代的所述目標有效點的所述橫向加權平均距離、所述目標有效點的所述縱向加權平均距離、所述目標有效點的所述加權平均速度;
22、循環迭代直至所述有效點集合中的所述有效點的所述聚類標志均為1,或所述聚類目標個數達到單幀最大聚類目標個數。
23、根據本公開的第一方面的某些實施例,所述計算此次迭代的所述目標有效點的所述橫向加權平均距離、所述目標有效點的所述縱向加權平均距離、所述目標有效點的所述加權平均速度,包括:
24、在此次迭代中,基于所述第二距離橫向分量、所述第二距離縱向分量、所述第二速度、所述第二能量得到所述目標有效點的第三距離橫向分量、所述目標有效點的第三距離縱向分量、所述目標有效點的第三速度、所述目標有效點的第三能量;
25、對各個所述第三距離橫向分量與各個所述第三能量分別相乘的積求和,得到第一中間值;
26、對各個所述第三距離縱向分量與各個所述第三能量分別相乘的積求和,得到第二中間值;
27、對各個所述第三速度與各個所述第三能量分別相乘的積求和,得到第三中間值;
28、對各個所述第三能量求和,得到第四中間值;
29、將所述第一中間值與所述第四中間值相除得到所述橫向加權平均距離,將所述第二中間值與所述第四中間值相除得到所述縱向加權平均距離,將所述第三中間值與所述第四中間值相除得到所述加權平均速度。
30、根據本公開的第一方面的某些實施例,所述根據所述聚類目標個數、所述運動參數,確認呼梯觸發計數,包括:
31、若所述聚類目標個數大于0,且所述橫向加權平均距離在閉區間橫向觸發距離的負值到所述橫向觸發距離的正值之間、所述縱向加權平均距離小于或等于縱向觸發距離、所述加權平均速度小于或等于觸發速度上限值,則將所述呼梯觸發計數加1;
32、若全部所述目標有效點都滿足所述橫向加權平均距離的絕對值大于橫向保護距離,或者全部所述目標有效點都滿足所述縱向加權平均距離大于縱向保護距離,則將所述呼梯觸發計數清零;
33、若所述聚類目標個數等于0,則目標丟失計數加1,若所述目標丟失計數大于最大允許丟失幀數,則將所述呼梯觸發計數清零。
34、根據本公開的第一方面的某些實施例,所述若所述呼梯觸發計數大于或等于呼梯觸發閾值,則控制電梯前往目標樓層,包括:
35、若所述呼梯觸發計數大于或等于所述呼梯觸發閾值,則周期性循環發送呼梯命令和狀態查詢命令,并點亮指示燈,根據所述呼梯命令控制所述電梯前往所述目標樓層,根據所述狀態查詢命令獲取電梯狀態,若所述電梯狀態為所述電梯到達所述目標樓層,且處于開門中或開門完成,則關閉所述指示燈,停止上報所述呼梯命令,繼續周期性循環發送所述狀態查詢命令,根據所述狀態查詢命令獲取所述電梯狀態,若所述電梯狀態為所述電梯在所述目標樓層關門完成,則停止發送所述狀態查詢命令,等待預設保護時間后,重新進入下一次檢測。
36、本公開的第二方面的實施例,一種電子設備,所述電子設備包括存儲器、處理器,所述存儲器存儲有計算機程序,所述處理器執行所述計算機程序時實現如上所述的一種電梯無接觸呼梯的人體檢測方法。
37、本公開的第三方面的實施例,一種存儲介質,所述存儲介質存儲有計算機程序,所述計算機程序被處理器執行時實現如上所述的一種電梯無接觸呼梯的人體檢測方法。
38、本公開實施例至少包括以下有益效果:首先獲取人體目標的中頻信號的每幀數據,對每幀數據進行快速傅里葉變換和cfar檢測,得到第一點云數據;接著根據第一點云數據中的目標點是否符合檢測距離和能量閾值要求篩選出有效點,得到有效點的第二點云數據;基于第二點云數據篩選出目標有效點,根據目標有效點的點數得到聚類目標個數,并計算運動參數;根據聚類目標個數、運動參數,確認呼梯觸發計數;若呼梯觸發計數大于或等于呼梯觸發閾值,則控制電梯前往目標樓層。根據第一點云數據中的目標點是否符合檢測距離和能量閾值要求進行有效點篩選,有效點的篩選與觸發距離關聯,最大限度上降低呼梯觸發受雷達波束覆蓋范圍內遠距離目標的干擾,提高了呼梯觸發的精確性。根據運動參數確認呼梯觸發計數,降低了人員正常經過時引起誤觸發的可能性,提高了呼梯觸發的穩定性和可靠性。
39、本公開的其他特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本公開而了解。
- 還沒有人留言評論。精彩留言會獲得點贊!