一種基于目標識別的智能控藻方法及裝置
本技術涉及廢水生物處理,特別是涉及一種基于目標識別的智能控藻方法及裝置。
背景技術:
1、由于大量氮磷污染物流入河流、湖泊等水體導致水域中出現(xiàn)不同程度的藻類繁殖異常現(xiàn)象,“水華”日趨嚴重,水體監(jiān)測及治理刻不容緩。使用無人船系統(tǒng)搭載超聲波抑藻裝備的無人船超聲控藻系統(tǒng),能夠在不影響原有水生生態(tài)的前提下通過釋放物理能量形式的彈性超聲波干擾藻類浮力調(diào)節(jié)功能,使其失去充分的光照和營養(yǎng),無法進行正常光合作用,代謝失衡而凋亡,被細菌降解利用。
2、然而現(xiàn)有的無人船超聲控藻系統(tǒng)根據(jù)需要進行人工啟動和設置,無法實現(xiàn)全天候定點水質(zhì)監(jiān)測、藻類爆發(fā)預警及早期生長抑制等功能,無法完成高效針對性控藻。
技術實現(xiàn)思路
1、本技術的目的是提供一種基于目標識別的智能控藻方法及裝置,以實現(xiàn)全天候定點水質(zhì)監(jiān)測、藻類爆發(fā)預警及早期生長抑制等功能,完成高效針對性控藻。
2、為實現(xiàn)上述目的,本技術提供了如下方案。
3、第一方面,本技術提供了一種基于目標識別的智能控藻方法,所述基于目標識別的智能控藻方法應用于無人船超聲控藻系統(tǒng),所述基于目標識別的智能控藻方法包括:
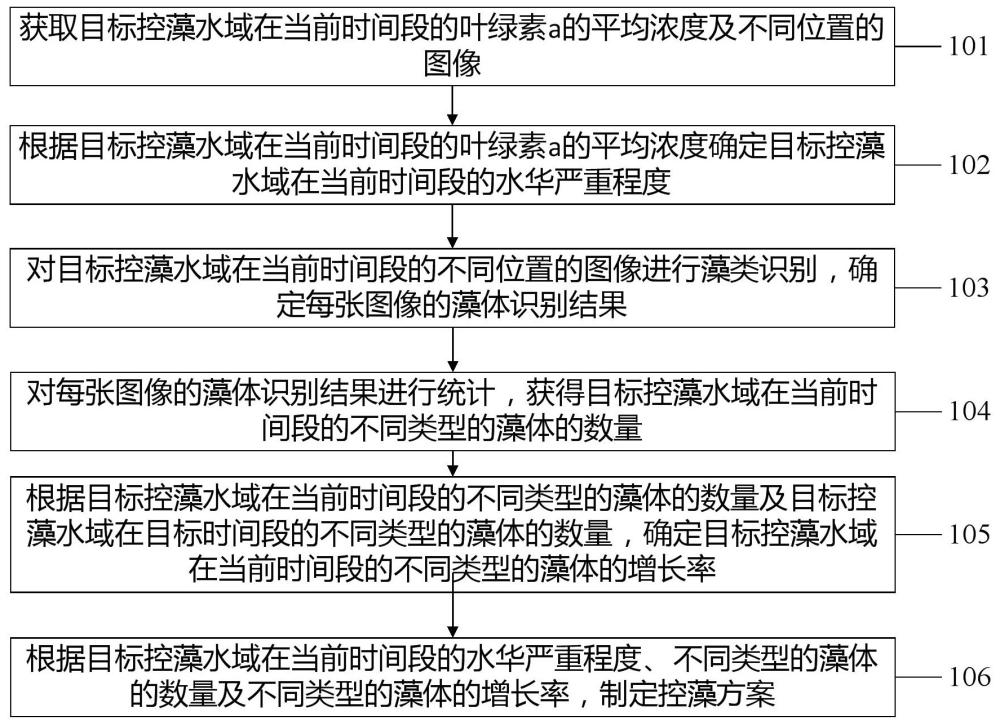
4、獲取目標控藻水域在當前時間段的葉綠素a的平均濃度及不同位置的圖像;
5、根據(jù)目標控藻水域在當前時間段的葉綠素a的平均濃度確定目標控藻水域在當前時間段的水華嚴重程度;
6、對目標控藻水域在當前時間段的不同位置的圖像進行藻類識別,確定每張圖像的藻體識別結果;所述藻體識別結果包括藻體的類型及不同類型的藻體的分布;
7、對每張圖像的藻體識別結果進行統(tǒng)計,獲得目標控藻水域在當前時間段的不同類型的藻體的數(shù)量;
8、根據(jù)目標控藻水域在當前時間段的不同類型的藻體的數(shù)量及目標控藻水域在目標時間段的不同類型的藻體的數(shù)量,確定目標控藻水域在當前時間段的不同類型的藻體的增長率;所述目標時間段為位于當前時間段之前的時間段;
9、根據(jù)目標控藻水域在當前時間段的水華嚴重程度、不同類型的藻體的數(shù)量及不同類型的藻體的增長率,制定控藻方案。
10、可選地,根據(jù)目標控藻水域在當前時間段的葉綠素a的平均濃度確定目標控藻水域在當前時間段的水華嚴重程度,具體包括:
11、當葉綠素a的平均濃度小于10μg/l時,確定水華嚴重程度為無水華;
12、當葉綠素a的平均濃度大于等于10μg/l且小于15μg/l時,確定水華嚴重程度為無明顯水華;
13、當葉綠素a的平均濃度大于等于15μg/l且小于50μg/l時,確定水華嚴重程度為輕度水華;
14、當葉綠素a的平均濃度大于等于50μg/l且小于100μg/l時,確定水華嚴重程度為中度水華;
15、當葉綠素a的平均濃度大于等于100μg/l時,確定水華嚴重程度為重度水華。
16、可選地,對目標控藻水域在當前時間段的不同位置的圖像進行藻類識別,確定每張圖像的藻體識別結果,具體包括:
17、基于預訓練的藻類目標檢測模型,對目標控藻水域在當前時間段的不同位置的圖像進行藻類識別,確定每張圖像的藻體識別結果;
18、所述預訓練的藻類目標檢測模型采用基于開源數(shù)據(jù)庫中的藻類圖像對yolov8模型進行預訓練的方式獲得。
19、可選地,基于預訓練的藻類目標檢測模型,對目標控藻水域在當前時間段的不同位置的圖像進行藻類識別,確定每張圖像的藻體識別結果,具體包括:
20、將目標圖像劃分為多個子區(qū)域;所述目標圖像為目標控藻水域在當前時間段的不同位置的圖像中的任一圖像;
21、分別將每個子區(qū)域輸入預訓練的藻類目標檢測模型,獲得每個子區(qū)域的藻體識別結果;
22、將每個子區(qū)域的藻體識別結果進行拼接,得到目標圖像的藻體識別結果。
23、可選地,基于預訓練的藻類目標檢測模型,對目標控藻水域在當前時間段的不同位置的圖像進行藻類識別,確定每張圖像的藻體識別結果,之后還包括:
24、選取目標控藻水域在當前時間段的不同位置的圖像中清晰度大于清晰度閾值的圖像,作為訓練圖像;
25、將所述訓練圖像及所述訓練圖像的藻體識別結果添加至數(shù)據(jù)庫;所述數(shù)據(jù)庫用于對預訓練的藻類目標檢測模型進行定期重訓練。
26、可選地,根據(jù)目標控藻水域在當前時間段的水華嚴重程度、不同類型的藻體的數(shù)量及不同類型的藻體的增長率,制定控藻方案,具體包括:
27、對目標控藻水域在當前時間段的不同類型的藻體的數(shù)量和增長率進行加權求和,獲得不同類型的藻體的加權求和結果,獲得不同類型的藻體的加權求和結果;
28、根據(jù)不同類型的藻體的加權求和結果確定不同類型的藻體的控藻優(yōu)先級;
29、當目標控藻水域在當前時間段的水華嚴重程度為輕度水華、中度水華或重度水華時,制定對控藻優(yōu)先級為一級的類型的藻體進行除藻的第一控藻方案;
30、當目標控藻水域在當前時間段的水華嚴重程度為無明顯水華且存在增長率大于增長率閾值的類型的藻體時,制定對增長率大于增長率閾值的類型的藻體進行除藻的第二控藻方案;
31、當目標控藻水域在當前時間段的水華嚴重程度為無明顯水華且不存在增長率大于增長率閾值的類型的藻體,或目標控藻水域在當前時間段的水華嚴重程度為無水華時,則不進行除藻。
32、可選地,第一控藻方案的除藻周期為48h,第二控藻方案的除藻周期為24h;增長率閾值的取值范圍為100%-300%。
33、可選地,在第一控藻方案中,當水華嚴重程度為輕度水華時,設置超聲除藻功率為5w/l;當水華嚴重程度為中度水華時,設置超聲除藻功率為20w/l;當水華嚴重程度為重度水華時,設置超聲除藻功率為30w/l。
34、第二方面,本技術提供一種基于目標識別的智能控藻裝置,包括:信息采集系統(tǒng)、目標識別與特征分析單元和智能控藻單元;
35、所述信息采集系統(tǒng)和所述目標識別與特征分析單元連接,所述信息采集系統(tǒng)布置于無人船超聲控藻系統(tǒng)中,用于獲取目標控藻水域在當前時間段的葉綠素a的平均濃度及不同位置的圖像;
36、所述目標識別與特征分析單元和智能控藻單元連接,所述目標識別與特征分析單元用于采用上述的基于目標識別的智能控藻方法,制定控藻方案;
37、所述智能控藻單元與無人船超聲控藻系統(tǒng)中的超聲波抑藻裝備的控制端連接,所述智能控藻單元用于根據(jù)所述控藻方案對所述超聲波抑藻裝備進行控制。
38、可選地,所述信息采集系統(tǒng)包括:水樣采集裝置、葉綠素a水質(zhì)分析儀和圖像采集裝置;
39、所述水樣采集裝置位于水面下0.5m處;
40、所述葉綠素a水質(zhì)分析儀和所述圖像采集裝置均與所述目標識別與特征分析單元連接。
41、根據(jù)本技術提供的具體實施例,本技術具有了以下技術效果。
42、本技術提供了一種基于目標識別的智能控藻方法及裝置,基于葉綠素a的平均濃度進行水華嚴重程度的識別,根據(jù)不同位置的圖像進行藻類識別,獲得藻體識別結果,對不同位置的圖像的藻體識別結果進行統(tǒng)計,獲得目標控藻水域的不同類型的藻體的數(shù)量,并結合連續(xù)獲取的不同類型的藻體的數(shù)量進行增長率計算,進而根據(jù)水化嚴重程度、不同類型的藻體的數(shù)量及增長率制定控藻方案,本技術能夠?qū)崿F(xiàn)水化嚴重程度、不同類型的藻體的數(shù)量及增長率的自動監(jiān)測,針對不同水化嚴重程度、不同類型的藻體的數(shù)量及增長率設置不同控藻方案,實現(xiàn)無人船控藻體系全天候定點水質(zhì)監(jiān)測、水質(zhì)數(shù)據(jù)分析預警及藻類爆發(fā)早期生長抑制等功能,完成高效針對性控藻。
- 還沒有人留言評論。精彩留言會獲得點贊!