一種內管道作業的自適應可變螺旋運動模塊化機器人
本發明涉及管道機器人領域,更具體地,涉及一種內管道作業的自適應可變螺旋運動模塊化機器人。
背景技術:
1、管道應用廣泛,承擔著物料運輸的重要使命,然而管道在經過一段時間的運行后,會出現磨損、腐蝕、裂紋、泄漏等問題,嚴重影響生產安全和效率,造成巨大的經濟損失和生態污染,因而管道安全問題尤為突出。為了確保管道系統的正常運行,需要對管道進行定期巡檢、檢測、清理、修復等作業。然而,管道內空間狹小且封閉,其輸送的又多為有毒有害物質,這使得傳統的人工作業的方式十分困難,且效率低、費用高、安全隱患大。
2、同時,現有的用于內管道作業的機器人體積大、質量大、成本高、能耗大、結構復雜、控制困難、作業效率低、運動穩定性差。同時,部分內管道作業機器人的運動方式單一,多為直線運動,導致作業范圍和效果受限;部分內管道作業機器人模塊化程度低,功能較為單一,無法靈活有效地兼容更換功能設備,難以滿足多樣化管道作業需求;部分內管道作業機器人的作業范圍和效率會受到自身結構的限制,如無法同時對多個間隔較遠的區域進行作業或無法攜帶多個設備進行配合作業,機器人的結構也會導致自身在內管道的運動覆蓋區域較大而容易遇到障礙物,且部分內管道作業機器人無法主動避障,從而影響機器人的結構、運動和作業的穩定性;部分內管道作業機器人難以適應不同內徑的管道,尤其是小內徑管道。此外,部分內管道巡檢機器人難以實時采集、傳輸、處理管道內壁情況,并對管道內壁損傷進行定位;部分內管道巡檢機器人巡檢效率低,數據有限,損傷檢出率低,只能沿管道軸向進行巡檢,無法進行高效率的全局的管道周向巡檢。
3、因此,研發小巧輕便、經濟環保、結構合理、控制簡單、作業效率高、作業范圍大且可調、運動覆蓋區域小、損傷檢出率高、可更換攜帶多種作業設備、可主動避障、可實時傳輸和處理管道內壁情況、可在不同內徑管道內進行自適應穩定可變螺旋運動和多樣化作業的模塊化機器人能夠解決上述問題,實現內管道作業的自動化,并保障員工和管道運輸的安全。
技術實現思路
1、為了實現內管道作業機器人的小巧化、輕便化、經濟化、環保化、簡易化、穩定化、高效化、可靠化、作業多樣化、運動覆蓋區域可變化、作業范圍可調化、主動避障功能、數據實時傳輸處理功能和多內徑適用功能,本發明提供一種內管道作業的自適應可變螺旋運動模塊化機器人。
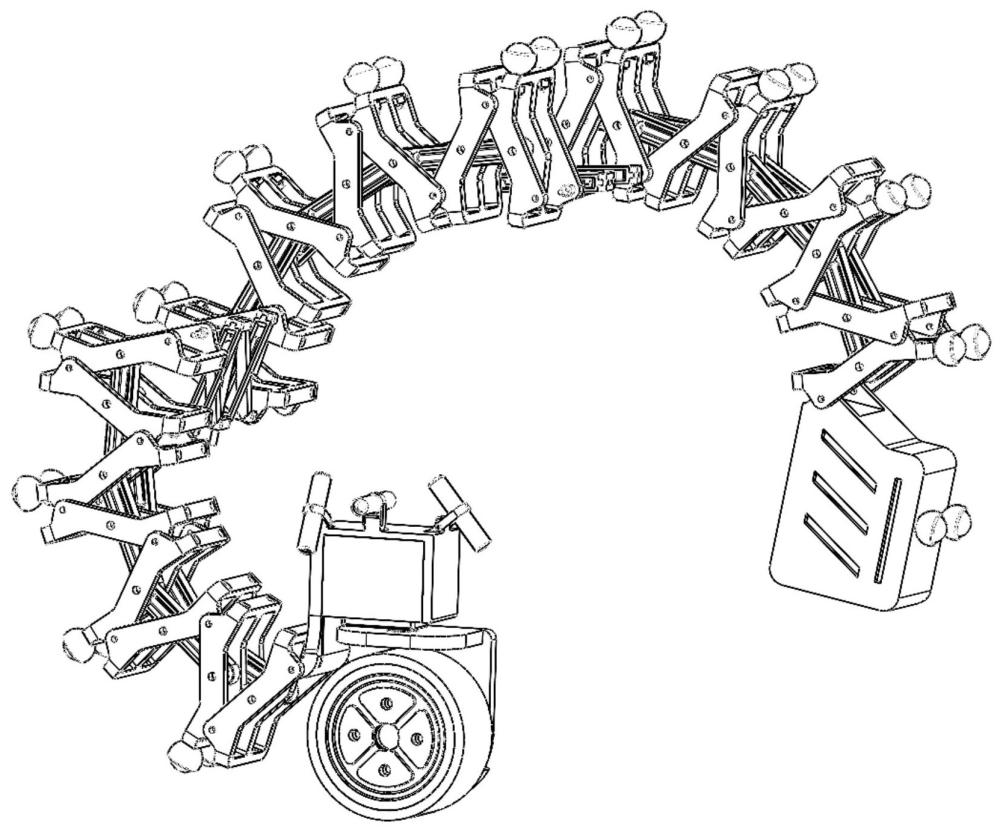
2、本發明的目的是通過以下技術方案實現的:一種內管道作業的自適應可變螺旋運動模塊化機器人,包括螺旋運動主體、導向驅動輪模塊、視覺巡檢模塊和磁吸附模塊;
3、所述螺旋運動主體由若干運動模塊和連接運動模塊的伸縮模塊組成;所述運動模塊由若干子節段組成,每個子節段包括呈錯位鏡像布置且鉸接成v型結構的第一子體和第二子體,以及將前后子節段v型結構相連的第一連桿和第二連桿,同時兩個v型結構通過相鄰子體錯位鉸接成w型結構;所述伸縮模塊包括若干子機構,每個子機構包括鉸接成剪式結構且軸線在同一平面內的第一子桿和第二子桿,首端和末端子機構的兩個子桿的同側分別通過鉸接模塊與待連接的子節段的兩個子體的同側鉸接,相鄰子機構通過連接模塊相連,所述連接模塊具有能夠同步帶動相鄰子機構沿管道軸向伸長或縮短的聯動軸;
4、所述導向驅動輪模塊安裝在運動模塊的首端或末端,包括轉向舵機和驅動電機,所述轉向舵機輸出軸與裝有驅動電機的轉向連接件連接,所述驅動電機輸出軸上安裝外側設有磁環的輪轂;所述視覺巡檢模塊裝在導向驅動輪模塊上,并通過攝像頭巡檢管道內部;所述磁吸附模塊裝在第二子體底部;
5、所述導向驅動輪模塊和運動模塊通過磁吸附在不同內徑管道內表面進行自適應彎曲,并使伸縮模塊聯動,通過控制轉向舵機使驅動電機轉到所需的螺旋運動升角,通過控制驅動電機使機器人進行螺旋運動。
6、進一步地,所述第一子體呈框型結構,且左右兩側上端和下端均開有橫向貫穿孔,中間設有豎直的支撐柱,將第一子體分成左右鏤空區,第一子體左右兩側中部和支撐柱中部開有橫向貫穿孔;所述第二子體與第一子體通過左右兩側下端的橫向貫穿孔鉸接,且第二子體和后一子節段的第一子體通過左右兩側上端的橫向貫穿孔鉸接;所述第一連桿兩端開有通孔,與前后子節段的第一子體的中部橫向貫穿孔鉸接,位于第一子體和第二子體的右鏤空區;所述第二連桿兩端開有通孔,與前后子節段的第二子體的中部橫向貫穿孔鉸接,位于第一子體和第二子體的左鏤空區。
7、進一步地,所述第一子桿和第二子桿中部和兩端開有同向通孔,第二子桿中間鏤空,使得第一子桿從中穿過,且兩者通過各自中部的通孔進行鉸接;所述連接模塊包括第一聯動件、第二聯動件和聯動軸,所述第一聯動件和第二聯動件呈工字結構,工字結構的中部及其兩個內凹結構的突出部分均開有通孔,所述第一聯動件和第二聯動件一側內凹結構通孔分別與伸縮模塊子機構的第一子桿和第二子桿一端通孔鉸接,另一側內凹結構通孔分別與伸縮模塊后一子機構的第一子桿和第二子桿一端通孔鉸接;所述聯動軸一端穿過第一聯動件中部通孔且能夠自由移動,另一端固定在第二聯動件中部通孔中。
8、進一步地,所述鉸接模塊包括鉸接件和限位件,所述鉸接件由圓柱結構和匚結構連接組成,所述匚結構的內凹結構的突出部分開有通孔,兩個鉸接件的匚結構通孔分別與伸縮模塊首端或末端子機構的兩個子桿的同側通孔鉸接,兩個鉸接件的圓柱結構分別與待連接的子節段的兩個子體的同側上端橫向貫穿孔鉸接,其中一個鉸接件的匚結構左側外壁接觸到子體外壁,另一個鉸接件的圓柱結構上固定寬度為相鄰子體錯位距離且與匚結構接觸的圓環狀限位件,使得兩個匚結構通孔在管道軸向位置一致,兩個鉸接件通過子體橫向貫穿孔進入子體內部的圓柱結構上固定與子體內壁接觸的圓環狀限位件。
9、進一步地,所述機器人還包括功能模塊,所述功能模塊安裝在所述運動模塊的首端或末端,底部安裝有磁吸附模塊;所述功能模塊內部鏤空,用于存放轉向舵機、驅動電機和攝像頭的電路板;子節段、子機構和功能模塊能夠搭載內管道作業用的功能設備,并在使用時與機器人和其螺旋運動的特點相結合,具體為:①使功能設備沿管道軸向的工作范圍至少有一個機器人螺旋運動螺距的長度并避免與機器人結構相干涉;②通過用不同橫向長度的伸縮模塊連接相鄰運動模塊使機器人的多個搭載功能設備的運動模塊和功能模塊以作業所需的間距排布;③當搭載有功能設備的多個子節段、子機構或功能模塊的運動軌跡重合時,若這些功能設備的功能相同,則相隔特定時間對同一位置或區域進行重復作業,若這些功能設備的功能不相同,則相隔特定時間對同一位置或區域進行輪流作業。
10、進一步地,所述運動模塊中所有子體依次錯位鉸接,且鉸接的錯位方向和錯位距離相同;運動模塊之間通過伸縮模塊和鉸接模塊形成錯位,且錯位方向與子節段子體間的錯位方向相同;兩個相鄰運動模塊之間通過伸縮模塊和鉸接模塊連接的兩個第一子體或第二子體之間的錯位距離,通過子節段結構參數、鉸接模塊尺寸、子機構數量及尺寸、連接模塊數量及尺寸計算得到。
11、進一步地,控制轉向舵機改變螺旋運動升角實現作業所需的螺旋運動螺距,或者配合驅動電機滿足作業時的速度分量要求;當螺旋運動升角α=0°時,機器人在管道內進行原地周向繞圈;當α=90°時,機器人沿管道軸向做直線運動;當0°<α<90°時,機器人在管道內做螺旋運動。
12、進一步地,使機器人的各個運動模塊的運動覆蓋區域相互重疊覆蓋,以減小機器人的運動覆蓋區域,使機器人沿管道軸向的運動距離為n個螺旋運動螺距l時,n≥1且為整數,后一運動模塊中的子節段恰好能運動到前一運動模塊中與其沿管道軸向投影相重合的子節段在沿管道軸向運動nl距離前的位置,此時兩個子節段的運動軌跡及運動覆蓋區域重合。
13、進一步地,當機器人螺旋運動升角α確定時,對于確定的待作業管道,機器人螺旋運動螺距也確定,其中為管道半徑,通過改變兩個相鄰運動模塊之間的錯位距離l1減小機器人的運動覆蓋區域,即令;若,其中為相鄰子體錯位距離,c為機器人吸附在管道內壁時運動模塊中相鄰子節段的相同相對位置處的磁吸附模塊與管道內壁的接觸點間的沿周向的弧長,則無需考慮運動模塊的子節段數量及相連方式,通過改變機器人結構參數來滿足;若,則機器人沿管道軸向投影后可見的子節段數越少,機器人的運動覆蓋區域越小,此時需要考慮運動模塊的子節段數量及相連方式,當機器人中最長的運動模塊的子節段數量越少,且運動模塊相連后短的運動模塊沿管道軸向的投影與最長的運動模塊沿管道軸向的投影越重合,機器人沿管道軸向投影后可見的子節段數越少。
14、進一步地,當機器人螺旋運動升角α未定時,對于確定的待作業管道,通過公式選擇螺旋運動升角α和相鄰兩個運動模塊間伸縮模塊子機構個數以減小機器人的運動覆蓋區域;當機器人中相鄰運動模塊間的伸縮模塊子機構個數都確定且相同時,選n=1時的α,并根據的關系考慮運動模塊的子節段數量及相連方式,進一步減小機器人的運動覆蓋區域。
15、本發明的有益效果是:
16、首先,該機器人小巧輕便,結構簡單合理,具有許多鏤空區,并采用輕質硬性材料,且由多個運動模塊、伸縮模塊、磁吸附模塊、導向驅動輪模塊、視覺巡檢模塊和功能模塊組成。而由于其模塊化,機器人各個模塊的數量和安裝方式可按需選擇,以實現穩定的機器人結構及螺旋吸附運動和合適的磁吸附作用及結構的簡化;提高機器人運動性能,實現機器人的輕松穩定驅動;靈活更換攜帶多個或多種設備,實現多樣化內管道作業。且該機器人拆裝方便,可輕易組裝與增減各個模塊,也可將機器人分拆成多份以便收納、搬運和后續組裝使用。而由于機器人的錯位及鉸接和可自由移動結構,對于不同內徑管道,機器人能在磁吸附的作用下在不同內徑管道內表面進行自適應彎曲螺旋,并通過運動模塊和伸縮模塊之間的聯動使伸縮模塊和機器人橫向伸長,且管道內徑越小,機器人彎曲螺旋程度越大,伸縮模塊伸展開的距離越大。另外,當機器人未彎曲或反向彎曲時,可使伸縮模塊收縮至最小橫向長度,減小機器人的橫向長度,從而可減小機器人的占用空間。此外,可通過彎曲和展平某一運動模塊(或子節段)或伸展和收縮某一伸縮模塊(或子機構或連接模塊)來聯動控制機器人整體的彎曲螺旋和橫向伸縮,如用于將機器人送到所需的管道內部深處或將機器人快速移出管道。
17、其次,該機器人可僅通過一個導向驅動輪模塊即一個驅動電機進行驅動,并通過轉向舵機控制導向驅動輪模塊及機器人的螺旋運動升角,能耗低,經濟環保,控制簡單,且機器人運動精度高、反應速度靈敏,同時萬向磁球可支持機器人多方向運動,從而實現不同升角的螺旋運動,以滿足不同作業需求,保障作業效率,降低能耗。此外,機器人的各個子節段、導向驅動輪模塊和功能模塊在管道內的相對位置及運動位置可確定,從而可實現對在管道內運動的機器人的各個部件的定位。
18、然后,該機器人可通過調整自身結構和螺旋運動升角并進一步優化運動模塊的子節段數量及相連方式來減小在待作業管道內的運動覆蓋區域,從而減小機器人遇到障礙物的可能性,減小障礙物對機器人結構、運動和工作造成的影響。同時,該機器人可通過攝像頭實時監測前方情況以進行主動避障。
19、最后,子節段、子機構和功能模塊都可搭載具有特殊功能的設備,且這些設備在具體使用時可與機器人和其螺旋運動的特點相結合,進一步提高性能和工作效率。如將設備工作范圍與機器人螺旋運動螺距的長度相結合;又如通過不同橫向長度的伸縮模塊連接兩相鄰運動模塊可改變機器人作業范圍,使機器人的搭載設備的運動模塊和功能模塊以作業所需的間距排布,從而實現同時對多個間隔較遠的區域進行作業或設備間的相互配合工作,且當搭載有設備的多個子節段或子機構或功能模塊的運動覆蓋區域也即運動軌跡重合時,可相隔特定時間對同一位置或區域進行重復作業或輪流作業,從而提高作業精度和效率。
20、此外,該機器人可通過攝像頭和螺旋吸附運動實現管道全局周向巡檢和管道軸向巡檢,可實時采集、傳輸管道內壁情況,并通過計算機軟件實時進行數據處理和損傷定位,故該機器人巡檢效率高、數據豐富、損傷檢出率高。
21、綜上,機器人能實現內管道作業的自動化,并保障員工和管道運輸的安全。
- 還沒有人留言評論。精彩留言會獲得點贊!