一種鐵路隧道無人機(jī)輔助感知方法、裝置、系統(tǒng)及介質(zhì)與流程
本發(fā)明實施例涉及無人機(jī),特別涉及一種鐵路隧道無人機(jī)輔助感知方法、裝置、系統(tǒng)及介質(zhì)。
背景技術(shù):
1、隨著鐵路網(wǎng)絡(luò)的不斷擴(kuò)展,鐵路隧道的數(shù)量也在不斷增加。傳統(tǒng)的隧道檢測方法,如人工巡檢,不僅效率低下,而且存在安全風(fēng)險。在實際中,難以實現(xiàn)無人機(jī)的超視距操作,操作人員在隧道外操作無人機(jī)進(jìn)行隧道內(nèi)作業(yè),安全性和作業(yè)效率差。
技術(shù)實現(xiàn)思路
1、本發(fā)明的目的在于至少提供一種鐵路隧道無人機(jī)輔助感知方法、裝置、系統(tǒng)及介質(zhì),至少可以解決操作人員在隧道外操作無人機(jī)進(jìn)行隧道內(nèi)作業(yè),安全性和作業(yè)效率差的問題。
2、為解決上述技術(shù)問題,本申請的至少一個實施例提供了一種鐵路隧道無人機(jī)輔助感知方法,包括:
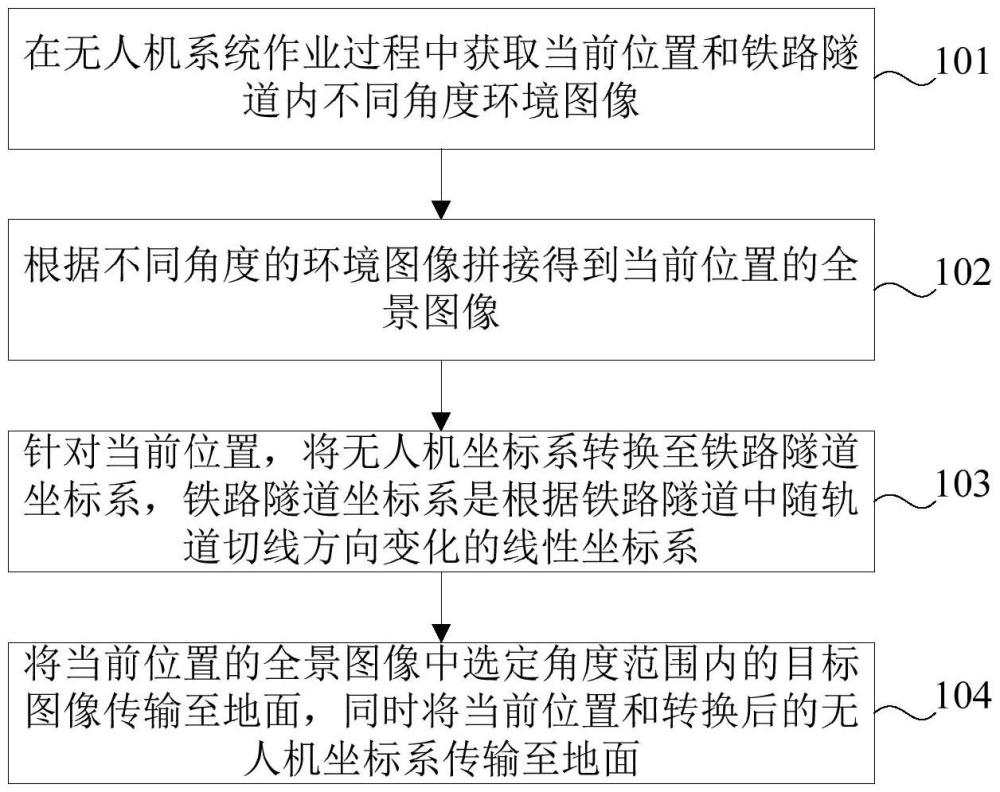
3、在無人機(jī)系統(tǒng)作業(yè)過程中獲取當(dāng)前位置和鐵路隧道內(nèi)不同角度環(huán)境圖像;
4、根據(jù)不同角度的環(huán)境圖像拼接得到所述當(dāng)前位置的全景圖像;
5、針對所述當(dāng)前位置,將無人機(jī)坐標(biāo)系轉(zhuǎn)換至鐵路隧道坐標(biāo)系,所述鐵路隧道坐標(biāo)系是根據(jù)鐵路隧道中隨軌道切線方向變化的線性坐標(biāo)系;
6、將當(dāng)前位置的全景圖像中選定角度范圍內(nèi)的目標(biāo)圖像傳輸至地面,同時將當(dāng)前位置和轉(zhuǎn)換后的無人機(jī)坐標(biāo)系傳輸至地面。
7、在一些優(yōu)選的實施例中,所述的鐵路隧道無人機(jī)輔助感知方法,還包括:
8、建立無人機(jī)坐標(biāo)系,所述無人機(jī)坐標(biāo)系的x軸是無人機(jī)系統(tǒng)的飛行方向,y軸是飛行方向的左側(cè)方向,z軸是垂直地面向上的方向;
9、建立鐵路隧道坐標(biāo)系,所述鐵路隧道坐標(biāo)系的x軸是軌道切線的方向,y軸是軌道切線的法向量方向,z軸是垂直地面向上的方向。
10、在一些優(yōu)選的實施例中,所述方法還包括:
11、將鐵路隧道內(nèi)的各條軌道抽象成一條三維的圓弧,建立所述圓弧的三維曲線方程;
12、將所述三維曲線方程按照所述鐵路隧道坐標(biāo)系的x軸進(jìn)行等間距采樣,得到每個采樣點的隧道切面方程,將所有采樣點的隧道切面方程構(gòu)建為字典數(shù)據(jù)集;
13、針對所述當(dāng)前位置,將無人機(jī)坐標(biāo)系轉(zhuǎn)換至鐵路隧道坐標(biāo)系,包括:
14、查詢所述字典數(shù)據(jù)集中與當(dāng)前位置匹配的目標(biāo)隧道切面方程;
15、將目標(biāo)隧道切面方程所表征的目標(biāo)隧道切面的法向量方向確定為無人機(jī)坐標(biāo)系新的x軸,將平行于所述目標(biāo)隧道切面且垂直于新x軸的方向確定為無人機(jī)坐標(biāo)系新的y軸。
16、在一些優(yōu)選的實施例中,根據(jù)不同角度的環(huán)境圖像拼接得到當(dāng)前位置的全景圖像,包括:
17、采用特征提取算法從不同角度環(huán)境圖像中提取出特征點陣;
18、利用特征點匹配算法確定不同角度環(huán)境圖像之間的特征點對應(yīng)關(guān)系;
19、根據(jù)所述特征點對應(yīng)關(guān)系,利用單應(yīng)性矩陣或透視變換矩陣將不同角度環(huán)境圖像對齊和拼接。
20、本申請的至少一個實施例提供了一種鐵路隧道無人機(jī)輔助感知裝置,包括:
21、獲取模塊,用于在無人機(jī)系統(tǒng)作業(yè)過程中獲取當(dāng)前位置和鐵路隧道內(nèi)不同角度環(huán)境圖像;
22、拼接模塊,用于根據(jù)不同角度的環(huán)境圖像拼接得到所述當(dāng)前位置的全景圖像;
23、轉(zhuǎn)換模塊,用于針對所述當(dāng)前位置,將無人機(jī)坐標(biāo)系轉(zhuǎn)換至鐵路隧道坐標(biāo)系,所述鐵路隧道坐標(biāo)系是根據(jù)鐵路隧道中隨軌道切線方向變化的線性坐標(biāo)系;
24、傳輸模塊,用于將當(dāng)前位置的全景圖像中選定角度范圍內(nèi)的目標(biāo)圖像傳輸至地面,同時將轉(zhuǎn)換后的無人機(jī)坐標(biāo)系傳輸至地面。
25、本申請的至少一個實施例提供了一種機(jī)載設(shè)備,包括:
26、至少一個處理器;以及,
27、與所述至少一個處理器通信連接的存儲器;其中,
28、所述存儲器存儲有可被所述至少一個處理器執(zhí)行的指令,所述指令被所述至少一個處理器執(zhí)行,以使所述至少一個處理器能夠執(zhí)行上述的鐵路隧道無人機(jī)輔助感知方法。
29、本申請的至少一個實施例提供了一種無人機(jī)系統(tǒng),包括:
30、無人機(jī)本體;
31、相機(jī)系統(tǒng),搭載于無人機(jī)本體,用于捕捉鐵路隧道內(nèi)不同角度環(huán)境圖像;
32、雷達(dá)單元,搭載于無人機(jī)本體,用于測量無人機(jī)本體與障礙物之間的距離;
33、慣性測量單元,搭載于無人機(jī)本體,用于測量無人機(jī)本體的姿態(tài)和加速度;
34、上述的機(jī)載設(shè)備,與所述相機(jī)系統(tǒng)、所述雷達(dá)單元和所述慣性測量單元相連;
35、圖傳電臺,與所述機(jī)載設(shè)備連接,用于將當(dāng)前位置的全景圖像中選定角度范圍內(nèi)的目標(biāo)圖像傳輸至地面;
36、數(shù)傳電臺,與所述機(jī)載設(shè)備連接,用于將當(dāng)前位置和轉(zhuǎn)換后的無人機(jī)坐標(biāo)系傳輸至地面。
37、本申請的至少一個實施例提供了一種地面站系統(tǒng),包括:
38、地面數(shù)據(jù)處理單元,用于接收無人機(jī)系統(tǒng)傳輸?shù)哪繕?biāo)圖像、當(dāng)前位置和轉(zhuǎn)換后的無人機(jī)坐標(biāo)系,還用于將所述目標(biāo)圖像中的特征點與預(yù)先構(gòu)建的鐵路隧道三維地圖的特征點進(jìn)行對比,確定無人機(jī)本體當(dāng)前所處鐵路隧道的深度;
39、三維地圖顯示單元,與所述地面數(shù)據(jù)處理單元連接,用于將無人機(jī)本體位于鐵路隧道的當(dāng)前深度和無人機(jī)坐標(biāo)系中的當(dāng)前位置,利用鐵路隧道切面輪廓圖和鐵路隧道鉛垂線與鐵軌切線之間所成平面圖進(jìn)行三維顯示。
40、本申請的至少一個實施例提供了一種鐵路隧道無人機(jī)輔助感知系統(tǒng),包括:
41、上述的無人機(jī)系統(tǒng);
42、上述的地面站系統(tǒng);
43、所述無人機(jī)系統(tǒng)與所述地面站系統(tǒng)之間通過通信鏈路進(jìn)行數(shù)據(jù)傳輸。
44、本申請的至少一個實施例提供了一種計算機(jī)可讀存儲介質(zhì),存儲有計算機(jī)程序,所述計算機(jī)程序被處理器執(zhí)行時實現(xiàn)上述的鐵路隧道無人機(jī)輔助感知方法。
45、本發(fā)明的一種鐵路隧道無人機(jī)輔助感知方法、裝置、系統(tǒng)及介質(zhì),在無人機(jī)系統(tǒng)作業(yè)過程中獲取當(dāng)前位置和鐵路隧道內(nèi)不同角度環(huán)境圖像;根據(jù)不同角度的環(huán)境圖像拼接得到所述當(dāng)前位置的全景圖像;針對所述當(dāng)前位置,將無人機(jī)坐標(biāo)系轉(zhuǎn)換至鐵路隧道坐標(biāo)系,所述鐵路隧道坐標(biāo)系是根據(jù)鐵路隧道中隨軌道切線方向變化的線性坐標(biāo)系;將當(dāng)前位置的全景圖像中選定角度范圍內(nèi)的目標(biāo)圖像傳輸至地面,同時將當(dāng)前位置和轉(zhuǎn)換后的無人機(jī)坐標(biāo)系傳輸至地面。通過不同角度圖像拼接成全景圖像后傳輸指定角度范圍的圖像回地面,以及將無人機(jī)坐標(biāo)系實時調(diào)整至隧道坐標(biāo)系再操控和傳回地面展示,能夠?qū)o人機(jī)在鐵路隧道中的超視距作業(yè)提供輔助感知,使無人機(jī)的操作符合隧道真實情況,為安全可靠的飛行提供保證。操作人員在隧道外操作無人機(jī)進(jìn)行隧道內(nèi)作業(yè)的安全性和作業(yè)效率明顯提高。
技術(shù)特征:
1.一種鐵路隧道無人機(jī)輔助感知方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的鐵路隧道無人機(jī)輔助感知方法,其特征在于,還包括:
3.根據(jù)權(quán)利要求1所述的鐵路隧道無人機(jī)輔助感知方法,其特征在于,所述方法還包括:
4.根據(jù)權(quán)利要求1所述的鐵路隧道無人機(jī)輔助感知方法,其特征在于,根據(jù)不同角度的環(huán)境圖像拼接得到當(dāng)前位置的全景圖像,包括:
5.一種鐵路隧道無人機(jī)輔助感知裝置,其特征在于,包括:
6.一種機(jī)載設(shè)備,其特征在于,包括:
7.一種無人機(jī)系統(tǒng),其特征在于,包括:
8.一種地面站系統(tǒng),其特征在于,包括:
9.一種鐵路隧道無人機(jī)輔助感知系統(tǒng),其特征在于,包括:
10.一種計算機(jī)可讀存儲介質(zhì),存儲有計算機(jī)程序,其特征在于,所述計算機(jī)程序被處理器執(zhí)行時實現(xiàn)權(quán)利要求1至4中任一項所述的鐵路隧道無人機(jī)輔助感知方法。
技術(shù)總結(jié)
本發(fā)明涉及無人機(jī)技術(shù)領(lǐng)域,公開了一種鐵路隧道無人機(jī)輔助感知方法、裝置、系統(tǒng)及介質(zhì)。方法包括:在無人機(jī)系統(tǒng)作業(yè)過程中獲取當(dāng)前位置和鐵路隧道內(nèi)不同角度環(huán)境圖像;根據(jù)不同角度的環(huán)境圖像拼接得到當(dāng)前位置的全景圖像;針對所述當(dāng)前位置,將無人機(jī)坐標(biāo)系轉(zhuǎn)換至鐵路隧道坐標(biāo)系,鐵路隧道坐標(biāo)系是根據(jù)鐵路隧道中隨軌道切線方向變化的線性坐標(biāo)系;將當(dāng)前位置的全景圖像中選定角度范圍內(nèi)的目標(biāo)圖像傳輸至地面,同時將當(dāng)前位置和轉(zhuǎn)換后的無人機(jī)坐標(biāo)系傳輸至地面。本發(fā)明能夠?qū)o人機(jī)在鐵路隧道中的超視距作業(yè)提供輔助感知,使無人機(jī)的操作符合隧道真實情況,為安全可靠的飛行提供保證。隧道外操作無人機(jī)進(jìn)行隧道內(nèi)作業(yè)的安全性和作業(yè)效率明顯提高。
技術(shù)研發(fā)人員:李強(qiáng),宋祥佳,王一博,楊玉龍
受保護(hù)的技術(shù)使用者:國能朔黃鐵路發(fā)展有限責(zé)任公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/3/20
- 還沒有人留言評論。精彩留言會獲得點贊!