一種無人機測繪信息采集方法及系統與流程
本發明涉及無人機測繪控制的,具體涉及一種無人機測繪信息采集方法及系統。
背景技術:
1、無人機測繪是指無人機通過所搭載的各種傳感器設備,進行空中測量和數據采集的過程。無人機可以從空中高效、精確地獲取地表的圖像信息和地理空間數據,這些數據可以用來生成地圖、數字模型、進行環境監測、資源管理、城市規劃等,為各種行業和應用場景提供了更加精確、高效和安全的空間數據解決方案。
2、無人機測繪具有方便、快捷、成本低等各項優勢,但是無人機的穩定性容易受到氣流擾動的影響,會導致無人機出現飛行不穩定甚至偏離航線。當無人機處于gps(globalpositioning?system,全球定位系統)信號較弱的地方,由于無法精準定位無人機位置,在氣流擾動的影響下,會使得采集的地面位置和高度信息不準確,進而影響繪制地形圖的準確性。
技術實現思路
1、為了解決如何在氣流擾動下準確獲得測繪信息的技術問題,本發明的目的在于提供一種無人機測繪信息采集方法及系統,減小了氣流擾動因素對無人機執行測繪任務的影響,使所獲得的測繪信息更加準確。所采用的技術方案具體如下:
2、第一方面,本發明實施例提供了一種無人機測繪信息采集方法,方法包括:
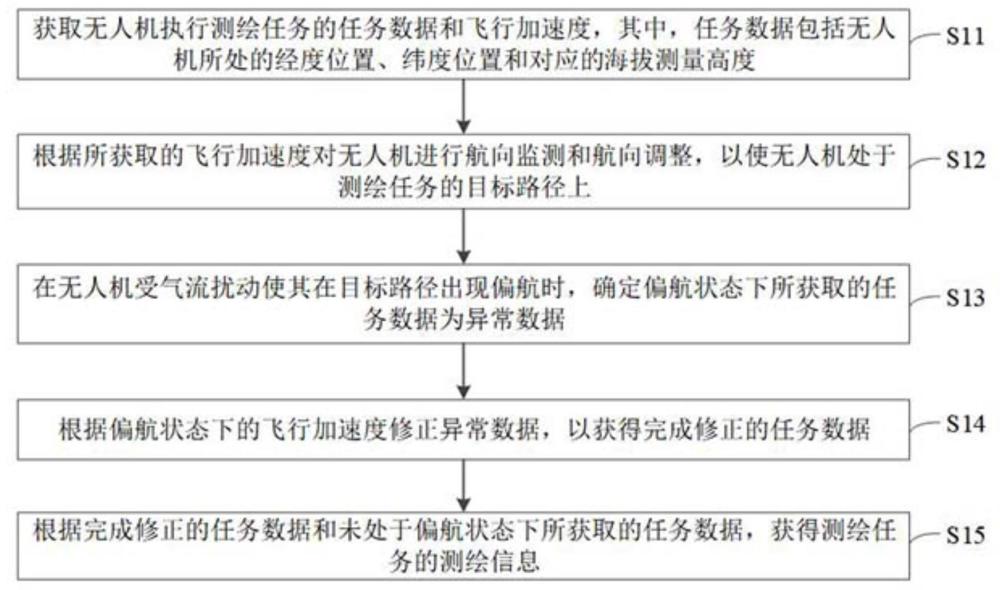
3、獲取無人機執行測繪任務的任務數據和飛行加速度,其中,任務數據包括無人機所處的經度位置、緯度位置和對應的海拔測量高度;
4、根據所獲取的飛行加速度對無人機進行航向監測和航向調整,以使無人機處于測繪任務的目標路徑上;
5、在無人機受氣流擾動使其在目標路徑出現偏航時,確定偏航狀態下所獲取的任務數據為異常數據;
6、根據偏航狀態下的飛行加速度修正異常數據,以獲得完成修正的任務數據;
7、根據完成修正的任務數據和未處于偏航狀態下所獲取的任務數據,獲得測繪任務的測繪信息。
8、在一種可選的實施例中,根據所獲取的飛行加速度對無人機進行航向監測和航向調整,包括:
9、根據所監測的飛行加速度和預設的加速器區間判斷無人機是否處于偏航狀態;
10、在無人機處于偏航狀態時,根據無人機在上一控制周期的歷史飛行能量和偏航狀態的飛行加速度,獲得無人機的糾偏角和當前控制周期的當前飛行能量;
11、根據糾偏角和當前飛行能量對無人機進行航向糾偏,直至無人機飛行至目標路徑。
12、在一種可選的實施例中,根據無人機在上一控制周期的歷史飛行能量和偏航狀態的飛行加速度,獲得無人機的糾偏角和當前控制周期的當前飛行能量,包括:
13、對偏航狀態的飛行加速度在無人機的正投影面上進行正交分解,以獲得無人機在目標路徑的第一加速度,以及垂直于目標路徑的第二加速度;
14、根據無人機在正航狀態的飛行加速度、第一加速度和第二加速度,獲得偏航狀態的能量修正值;
15、根據能量修正值對歷史飛行能量的修正結果,獲得當前飛行能量;
16、根據第一加速度與第二加速度之間的正切角,獲得糾偏角。
17、在一種可選的實施例中,根據偏航狀態下的飛行加速度修正異常數據,以獲得完成修正的任務數據,包括:
18、在偏航狀態根據飛行加速度確定無人機的飛行偏移狀態,其中,飛行偏移狀態包括在目標路徑的飛行遲滯或飛行超前;
19、根據不同飛行偏移狀態的飛行加速度對應修正所獲取異常數據中的經度位置和緯度位置,以獲得無人機在目標路徑的任務經度和任務緯度;
20、根據偏航狀態的飛行加速度,確定無人機在垂直地面方向的偏移距離和偏移角度;
21、根據偏移距離和偏移角度對應修正所獲取異常數據中的初始測量值,以獲得無人機在目標路徑的海拔測量高度;
22、將任務經度、任務緯度和對應的海拔測量高度,確定為完成修正的任務數據。
23、在一種可選的實施例中,根據不同飛行偏移狀態的飛行加速度對應修正所獲取異常數據中的經度位置和緯度位置,以獲得無人機在目標路徑的任務經度和任務緯度,包括:
24、在飛行偏移狀態為飛行超前時,根據相鄰監測周期的飛行加速度、周期時長和飛行速度,獲得無人機的超前偏移量;
25、根據超前偏移量對異常數據中經度位置和緯度位置的修正結果,獲得無人機的第一任務經度和第一任務緯度;
26、在飛行偏移狀態為飛行遲滯時,根據相鄰監測周期的飛行加速度、周期時長和飛行速度,獲得無人機的遲滯偏移量;
27、根據遲滯偏移量對異常數據中經度位置和緯度位置的修正結果,獲得無人機的第二任務經度和第二任務緯度。
28、在一種可選的實施例中,獲得無人機的超前偏移量或遲滯偏移量之后,方法還包括:
29、根據公式獲得偏移可信度,為飛行偏移狀態下所獲取的加速度數據量,為飛行偏移狀態的第i個飛行加速度,為飛行偏移狀態的第i+1個飛行加速度,為歸一化函數;
30、根據偏移可信度對超前偏移量或遲滯偏移量進行更新,以獲得飛行偏移狀態的實際偏移量。
31、在一種可選的實施例中,根據偏航狀態的飛行加速度,確定無人機在垂直地面方向的偏移距離和偏移角度,包括:
32、根據偏航狀態下無人機在目標路徑的飛行加速度,獲得無人機的路徑偏移量;
33、根據偏航狀態下無人機在垂直方向的飛行加速度,獲得無人機的垂直偏移量;
34、根據路徑偏移量和垂直偏移量,獲得無人機的偏移距離;
35、根據垂直偏移量與路徑偏移量的正弦角度,獲得無人機的偏移角度。
36、在一種可選的實施例中,根據路徑偏移量和垂直偏移量,獲得無人機的偏移距離,包括:
37、根據公式,獲得偏移距離,其中,為路徑偏移量,為垂直偏移量,為路徑偏移量的第一可信度,為垂直偏移量的第二可信度。
38、在一種可選的實施例中,根據偏移距離和偏移角度對應修正所獲取異常數據中的初始測量值,以獲得無人機在目標路徑的海拔測量高度,包括:
39、根據偏移距離和偏移角度,獲得無人機實施地面測距時激光發射的第一垂直偏移量和激光接收的第二垂直偏移量;
40、根據初始測量值、第一垂直偏移量和第二垂直偏移量,獲得海拔測量高度。
41、第二方面,本發明實施例還提供了一種無人機測繪信息采集系統,系統包括:
42、數據采集終端,用于獲取無人機執行測繪任務的任務數據和飛行加速度,其中,任務數據包括無人機所處的經度位置、緯度位置和對應的海拔測量高度;
43、控制終端,連接數據采集終端,控制終端用于根據所獲取的飛行加速度對無人機進行航向監測和航向調整,以使無人機處于測繪任務的目標路徑上;
44、數據處理終端,連接數據采集終端,數據處理終端用于在無人機受氣流擾動使其在目標路徑出現偏航時,確定偏航狀態下所獲取的任務數據為異常數據;
45、數據處理終端還用于根據偏航狀態下的飛行加速度修正異常數據,以獲得完成修正的任務數據;
46、數據處理終端還用于根據完成修正的任務數據和未處于偏航狀態下所獲取的任務數據,獲得測繪任務的測繪信息。
47、本發明具有如下有益效果:
48、本發明的技術方案通過獲取無人機執行測繪任務的任務數據和飛行加速度,飛行加速度表征了無人機的飛行狀態,可以根據所獲取的飛行加速度對無人機進行航向監測和航向調整,以使無人機盡可能處于測繪任務的目標路徑上,減小了偏航對測繪精度的影響;同時,在無人機受氣流擾動使其在目標路徑出現偏航時,確定偏航狀態下所獲取的任務數據為異常數據;根據偏航狀態下的飛行加速度修正異常數據,以獲得完成修正的任務數據;根據完成修正的任務數據和未處于偏航狀態下所獲取的任務數據,獲得測繪任務的測繪信息,由于對異常數據實施修正,進一步減小了氣流擾動對測繪精度的影響,使無人機能夠全面采集測繪任務所處區域的數據,使所獲得的測繪信息準確、可靠,進而提高了測繪信息的準確性。
- 還沒有人留言評論。精彩留言會獲得點贊!