一種基于AI智能體的自動駕駛仿真微觀行為交互方法及系統與流程
本發明涉及自動駕駛仿真領域,具體涉及一種基于ai智能體的自動駕駛仿真微觀行為交互方法。
背景技術:
1、隨著自動駕駛技術逐步邁向大規模商業化,仿真測試已成為驗證其有效性的關鍵工具。然而,現有的自動駕駛仿真技術在仿真測試中,往往局限于特定數據集或場景,進而無法充分結合多源數據(如開源數據、仿真數據和路側數據)來構建復雜的、多樣化的微觀交互。同時,現有基于規則或傳統機器學習方法的行為預測對于提取高維復雜數據中的有效特征較為困難,導致其在復雜交通場景中的表現較差,難以實現對ai智能體在多種條件下的精準預測。最后,現有仿真技術在處理位置信息、地圖信息等動態環境數據時存在效率低下的問題,且在大規模場景下的計算資源消耗較高,導致仿真過程的實時性不足和計算資源的浪費。
2、通過對現有技術文獻的檢索發現,公開號為cn115032912a的發明申請“一種自動駕駛仿真測試方法”采用了基于深度強化學習的技術來生成和優化交通流策略,通過積累大量的交通流樣本數據,訓練深度強化學習模型,使單智能體能夠自主學習和形成符合現實情況的活動軌跡。通過將多個單智能體組合排列,形成多智能體交通流,用于對自動駕駛車輛(主車)進行仿真測試。場景編輯器用于配置多智能體與主車之間的交互行為,從而模擬更復雜的交通場景,貼近真實世界的交通流策略。此外,深度強化學習模型通過不斷與環境交互,優化單智能體的行為,使其能夠更智能地響應主車的動作,提高仿真測試的準確性和可靠性。然而該發明中所使用的深度強化學習模型泛化能力不足,模型在特定的訓練環境中可能表現良好,但由于其對訓練數據的依賴性較強,在面對未見過的場景時,模型的泛化能力往往不足。這可能導致模型在實際自動駕駛仿真中對新出現的交通狀況無法做出準確的響應,從而影響仿真測試的可靠性。同時,該發明中深度強化學習模型的訓練需要大量的計算資源和時間,特別是在處理復雜交通流場景時,這種資源消耗問題更加明顯。這不僅增加了開發成本,也限制了模型的實時應用能力。最后,該發明難以處理多智能體間的復雜交互,盡管深度強化學習能夠通過訓練優化單智能體的行為,但在多智能體復雜交互場景中,模型可能難以充分捕捉智能體之間的微妙互動,從而影響交通流策略的精確性。公開號為cn115032912a的發明申請“物體行為數據的生成方法、相關方法和設備”通過定義物體行為相關的因素并從自動駕駛的路測數據中提取這些行為特征,生成目標物體行為數據。此外,該發明還包括對目標行為數據的檢索和調整,以增強測試的靈活性和效率。然而該發明實現難度高且泛化性差,雖然基于規則的方法能夠保證一定的可控性和可解釋性,但在面對復雜多變的自動駕駛場景時,規則的設計和實現難度較大,且難以適應不同的交通環境,導致泛化能力較弱。同時,該發明在交互層面中的行為生成不夠精確,盡管該方法在提高仿真測試的真實性上有所進展,但在實際應用中,物體行為數據的生成仍可能無法完全捕捉復雜場景中智能體之間的交互細節,導致仿真結果與真實情況存在差距。最后,該發明對數據調整的復雜性和人工依賴度高,雖然其允許對生成的數據進行調整,但這往往需要人為干預,增加了操作的復雜性,可能影響仿真測試的效率和可重復性。
技術實現思路
1、為了解決現有技術仿真真實度差,預測不準確,計算效率低的問題,本發明提供如下方案:一種基于ai智能體的自動駕駛仿真微觀行為交互方法,所述方法包括:
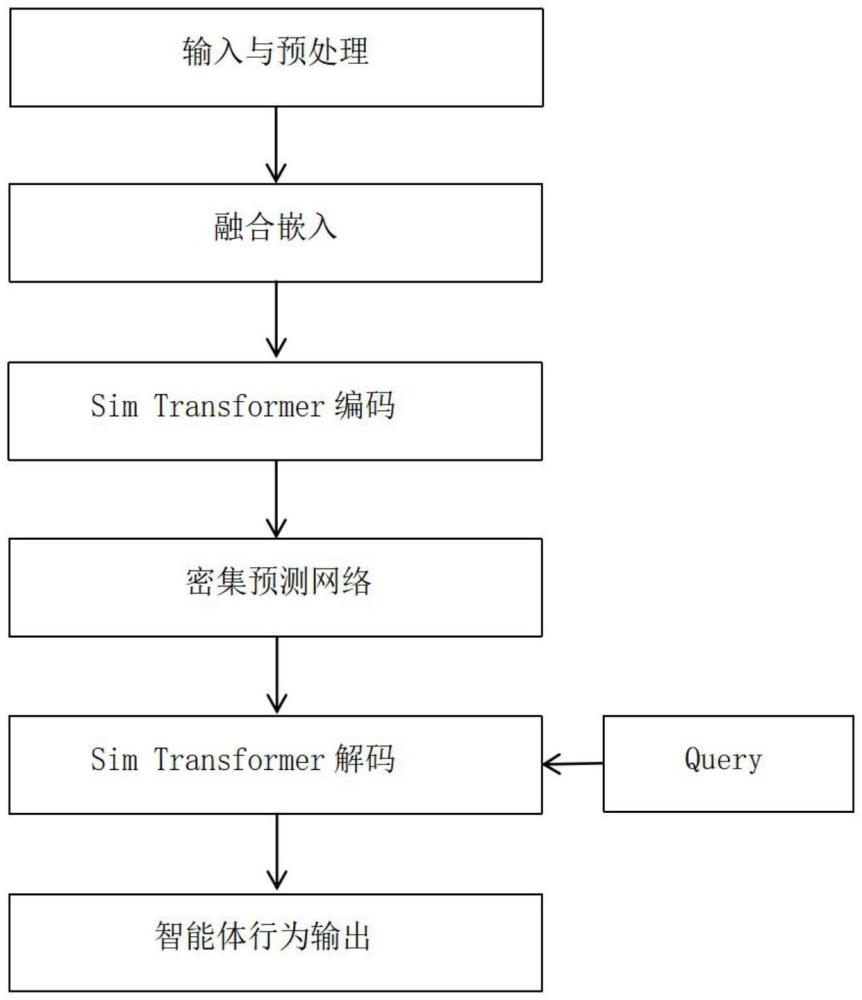
2、s1.輸入與預處理步驟,對多源數據進行預處理,得到軌跡數據和地圖數據;
3、s2.融合嵌入步驟,將所述軌跡數據和所述地圖數據進行深度融合并嵌入到統一的特征空間中,得到多模態特征向量;
4、s3.sim?transformer編碼步驟,將所述多模態特征向量轉換為全局交互特征的高維特征表示;
5、s4.密集預測網絡步驟,根據所述全局交互特征的高維特征生成預測信息;
6、s5.sim?transformer解碼步驟,用于根據所述預測信息結合query輸出具體行為決策;
7、s6.智能體行為輸出步驟,根據所述具體行為決策調整智能體的實際操作。
8、進一步,所述多源數據包括:開源數據、仿真數據和路側數據。
9、進一步,所述軌跡數據的格式為:[n,th,dt],其中,n是指預測的車輛數量,th是指歷史軌跡點數量,dt是軌跡特征屬性;
10、所述地圖數據的格式為[n,lc,dm],其中lc是指道路線的數量,dm是指地圖的特征屬性。
11、進一步,所述將所述軌跡數據和所述地圖數據進行深度融合并嵌入到統一的特征空間中通過:
12、x=φk,s(g(f))
13、實現,其中,g表示pointnet神經網絡模型骨干網絡層,φk,s表示最大池化層。
14、進一步,所述將所述多模態特征向量轉換為全局交互特征的高維特征表示具體通過層級式滑動窗口方法與多頭自注意力機制實現。
15、進一步,所述預測信息通過:
16、
17、獲得,其中,mlp表示全連接神經網絡層,si表示輸入的注意力分數。
18、進一步,所述query包括位置查詢和意圖查詢。
19、一種基于ai智能體的自動駕駛仿真微觀行為交互系統,所述系統包括:輸入與預處理模塊、融合嵌入模塊、sim?transformer編碼器模塊、密集預測網絡模塊、simtransformer解碼器模塊和智能體行為輸出模塊;
20、所述輸入與預處理模塊,用于對多源數據進行預處理,得到軌跡數據和地圖數據并將其發送給所述融合嵌入模塊;
21、所述融合嵌入模塊,用于將所述軌跡數據和所述地圖數據進行深度融合并嵌入到統一的特征空間中,得到多模態特征向量并將其發送給所述sim?transformer編碼器模塊;
22、所述sim?transformer編碼器模塊,用于將所述多模態特征向量轉換為全局交互特征的高維特征表示,并將所述全局交互特征的高維特征表示發送給所述密集預測網絡模塊;
23、所述密集預測網絡模塊,用于根據所述全局交互特征的高維特征生成預測信息,并將所述預測信息發送給所述sim?transformer解碼器模塊;
24、所述sim?transformer解碼器模塊,用于根據所述預測信息結合query輸出具體行為決策,并將所述具體行為決策發送給所述智能體行為輸出模塊;
25、所述智能體行為輸出模塊,用于根據所述具體行為決策調整智能體的實際操作。
26、與現有技術相比,本發明的有益效果為:
27、(1)本發明基于sim?transformer架構,通過綜合考慮多智能體間的時空交互關系,構建基于多智能體軌跡的自注意力機制實現對復雜交通場景中多智能體的行為預測與決策。綜合考慮了智能體間的時空交互關系,提升了仿真中智能體行為模擬的準確性和一致性。
28、(2)本發明利用pointnet網絡將軌跡信息和地圖信息深度融合與特征對齊,嵌入到統一的特征空間中,精準建模智能體之間的時空關系。這種融合嵌入方法能夠自動適應不同交通場景的復雜性,保證了輸入點云的旋轉、平移和多尺度的不變性,提高了模型方法在多變交通環境中的適應能力。
29、(3)本發明使用了層級式滑動窗口機制。在較短時間窗口內進行局部行為響應預測(如避障、換道),而在較長時間窗口內處理全局規劃和路徑優化,確保了局部行為與全局策略的連貫性。進而在處理大規模多智能體仿真時能顯著提升計算效率和決策準確性。
30、(4)本發明使用了位置和意圖雙查詢機制。位置查詢根據智能體的實時位置信息,動態適配當前交通環境的變化,確保智能體的操作與周圍交通條件保持一致;意圖查詢則通過對智能體未來行為意圖的分析(如換道、加速等),優化其決策過程,使得智能體能夠預判和應對復雜交通場景中的潛在風險。雙查詢機制共同作用,提升了仿真中智能體行為預測的準確性和連貫性。
31、(5)本發明通過集成開源數據、仿真數據和路側數據,提供了豐富多樣的仿真環境,顯著提高了仿真的真實性和代表性。這種數據集成方法不僅擴展了仿真場景的覆蓋范圍,還增強了模擬結果的可靠性。
- 還沒有人留言評論。精彩留言會獲得點贊!