一種基于物聯網的精準泊車控制方法、系統及存儲介質與流程
本技術涉及物聯網的,尤其是涉及一種基于物聯網的精準泊車控制方法、系統及存儲介質。
背景技術:
1、礦渣微粉,全稱為粒化高爐礦渣粉,簡稱礦粉或水渣粉,是由鋼鐵廠冶煉生鐵時產生的廢渣經干燥磨粉而成的一種細粉狀物質。
2、礦渣微粉的生產企業會采用罐車與公路運輸的方式來運輸礦渣微粉。過程為將礦渣微粉通過氣力輸送的方式裝入罐車,利用罐車自帶的空壓機將微粉卸到指定地點。罐車運輸具有靈活性高、裝卸方便、可直接送達施工現場等優點,適用于短距離運輸以及對運輸時間和地點要求較為靈活的情況,比如城市內的建筑施工現場。
3、現有的礦渣微粉裝車流程為駕駛員將車輛開入微粉庫發料倉,停在事先劃線的區域內,然后爬上車頂打開車輛罐口,再由發貨操作員控制發貨頭的位置,使發貨頭能夠正好落入車輛罐口。由于發貨操作員只能從固定方向觀看發貨頭對準車輛罐口的情況,視角存在很多遮擋盲區。為確保發貨頭正確落入車輛罐口,操作員需要站起身來再次確認,如果落入異常需要進行微調,還需要操作員遠程對講駕駛員手動調整發貨頭。現有人工操作發貨頭對準車輛罐口的過程,耗時長,效率低。
技術實現思路
1、為了提升礦渣微粉發貨頭對準車輛罐口的工作效率,本技術提供一種基于物聯網的精準泊車控制方法、系統及存儲介質。
2、第一方面,本技術提供一種基于物聯網的精準泊車控制方法,采用如下的技術方案:
3、一種基于物聯網的精準泊車控制方法,包括如下步驟:
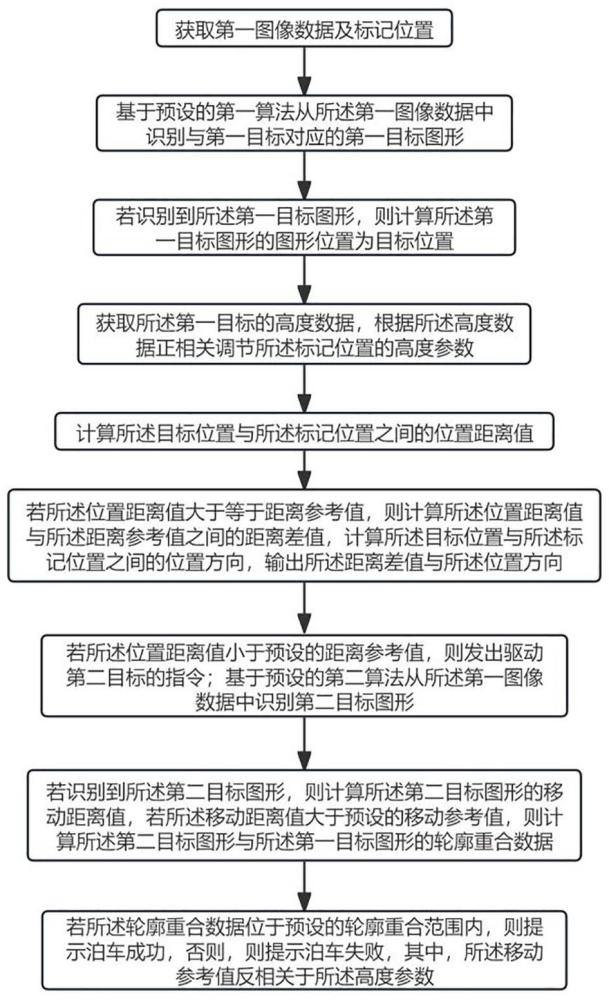
4、獲取第一圖像數據及標記位置;
5、基于預設的第一算法從所述第一圖像數據中識別與第一目標對應的第一目標圖形;
6、若識別到所述第一目標圖形,則計算所述第一目標圖形的圖形位置為目標位置;
7、獲取所述第一目標的高度數據,根據所述高度數據正相關調節所述標記位置的高度參數;
8、計算所述目標位置與所述標記位置之間的位置距離值;
9、若所述位置距離值大于等于距離參考值,則計算所述位置距離值與所述距離參考值之間的距離差值,計算所述目標位置與所述標記位置之間的位置方向,輸出所述距離差值與所述位置方向;
10、若所述位置距離值小于預設的距離參考值,則發出驅動第二目標的指令;基于預設的第二算法從所述第一圖像數據中識別第二目標圖形;
11、若識別到所述第二目標圖形,則計算所述第二目標圖形的移動距離值,若所述移動距離值大于預設的移動參考值,則計算所述第二目標圖形與所述第一目標圖形的輪廓重合數據;
12、若所述輪廓重合數據位于預設的輪廓重合范圍內,則提示泊車成功,否則,則提示泊車失敗,其中,所述移動參考值反相關于所述高度參數。
13、通過采用上述技術方案,通過預設的第一算法從現場圖像數據中識別罐口,并計算其位置和高度,為后續精確調整下料管位置提供了準確依據,提高了定位的精準度,減少了人工判斷的誤差。根據罐口高度數據正相關調節預設下料位置的高度參數,使下料管能更好地適應不同高度的車輛罐口,增強了系統的通用性和適應性,避免因罐口高度差異導致的對位困難,進一步提升了對位效率。計算罐口位置與預設下料位置的距離差值和方向并輸出,能實時為系統調整下料管位置提供明確的引導,使下料管能快速、準確地向罐口移動,有效縮短了對位時間,提高了工作效率。在發出驅動下料管的指令后,基于第二算法識別下料管圖形,并計算其移動距離值和與罐口的輪廓重合數據,確保下料管精準對準罐口。同時,移動參考值反相關于罐口高度參數,實現了根據罐口高度動態調整下料管移動的精度控制,進一步保障了對位的準確性和高效性。根據輪廓重合數據判斷泊車是否成功并給出相應提示,方便操作人員及時了解對位情況。若泊車失敗可及時調整,避免了無效操作和時間浪費,有助于持續優化對位過程,提升整體工作效率。
14、可選地,獲取第一圖像數據的方法包括如下步驟:
15、基于傾斜于第一目標的攝像裝置,按照單位時間內n幅圖的頻率采集第一圖像;
16、計算設定時間段內所述高度數據的離散系數;
17、若所述離散系數大于設定閾值,則根據所述離散系數調節n的大小,所述離散系數越大,所述n越大;所述離散系數越小,所述n越小。
18、通過采用上述技術方案,攝像頭與距離傳感器位于工業設備上有抖動,針對抖動進行數據優化,攝像頭采集n幅圖像-單位時間中的采集數量,然后平均濾波;通過距離傳感器的數據抖動來調節n的值。攝像裝置傾斜于第一目標(罐口)按單位時間內n幅的頻率采集圖像,配合平均濾波處理,能在設備抖動時獲取更穩定的圖像數據。單位時間內采集多幅圖像進行平均濾波,可減少因抖動造成的圖像模糊、變形等問題,提高圖像質量,為準確識別罐口提供更可靠的圖像基礎,有助于提升基于圖像識別的罐口定位精度,保障精準泊車控制的準確性。利用傾斜于第二目標(下料管)的激光測距裝置,基于tof算法通過發射和接收激光脈沖的時間差計算高度數據,這種方式能較為精準地獲取罐口高度信息。在工業設備抖動環境下,該方法受抖動影響相對較小,為后續根據罐口高度調整下料管位置提供精確的數據支持,增強了精準泊車控制中高度調節的準確性。計算設定時間段內高度數據的離散系數,并根據離散系數調節圖像采集頻率n。當離散系數大于設定閾值,即高度數據抖動較大時,增大n值,增加單位時間內的圖像采集數量。這樣可以采集更多圖像進行平均濾波,進一步降低抖動對圖像的影響,獲取更清晰、準確的罐口圖像,提高罐口識別和定位的準確性;反之,離散系數小時減小n值,在保證圖像質量的同時,避免過度采集圖像造成資源浪費,提高系統運行效率。通過距離傳感器的數據抖動來調節攝像頭的圖像采集頻率n,實現了圖像采集與距離測量的協同優化。在工業設備抖動的復雜環境下,使系統能夠自適應調整工作參數,保障圖像數據和高度數據的準確性,提升了整個精準泊車控制系統的穩定性和可靠性,從而有利于確保下料管能更高效、精準地對準車輛罐口,提高礦渣微粉發貨頭的工作效率。
19、可選地,獲取第一圖像數據后,方法還包括如下步驟:
20、基于預設的塵霧識別算法,從所述第一圖像中識別目標特征;
21、若識別到所述目標特征,則發出預警提示并觸發急停指令,且將所述目標特征的定位信息發送至后臺終端。
22、通過采用上述技術方案,在發貨過程中可能出現冒灰等意外情況,通過全景攝像機采集整個發貨現場的圖像進行識別,檢測到冒灰則立刻急停,無需人工干預。不僅能及時阻止冒灰現象進一步惡化,避免粉塵污染擴大,還能有效降低因意外導致的設備故障風險,保障作業人員的身體健康。
23、可選地,基于多個水平朝向所述第一目標側壁的距離傳感器,方法還包括如下步驟:
24、若識別到所述第一目標圖形,則獲取多個距離傳感器測得的一組橫向距離參數;
25、根據一組橫向距離參數擬合出橫向波動曲線,將橫向波動曲線與預設的橫向距離曲線進行波動幅度匹配,計算出橫向曲線匹配度;
26、如果所述橫向曲線匹配度低于預設的閾值,則根據一組橫向距離參數,修正所述目標位置。
27、通過采用上述技術方案,在礦渣微粉發貨過程中,車輛罐口(第一目標)位置可能存在偏差或不規則情況。本技術方案借助多個水平朝向第一目標側壁的距離傳感器,極大地提升了對罐口位置判斷的準確性與發貨作業的穩定性。當識別到第一目標圖形后,獲取多個距離傳感器測得的一組橫向距離參數,這些參數能夠精準反映罐口不同位置的橫向距離信息。基于此擬合出的橫向波動曲線,通過與預設的橫向距離曲線進行波動幅度匹配并計算橫向曲線匹配度,為判斷罐口實際位置是否符合標準提供了量化依據。若橫向曲線匹配度低于預設閾值,表明罐口位置存在異常偏差,此時依據一組橫向距離參數修正目標位置,能夠有效糾正因圖像模糊導致的判斷失誤;減少了因錯誤定位而產生的對準失誤,降低了物料泄漏風險,保障了發貨作業的順暢進行,避免了因罐口位置判斷不準確帶來的時間浪費與物料損失,有力地提升了整個礦渣微粉發貨流程的精準性與可靠性,確保發貨作業高效、穩定開展。
28、可選地,獲取所述第一目標的高度數據的方法包括如下步驟:
29、基于多個位于第一目標頂部,且垂直向下的距離傳感器;
30、若識別到所述第一目標圖形,則獲取多個距離傳感器測得的一組豎向距離參數;
31、根據一組豎向距離參數計算出所述第一目標的高度數據;
32、并根據一組豎向距離參數擬合出豎向波動曲線,將豎向波動曲線與預設的豎向距離曲線進行波動幅度匹配,計算出豎向曲線匹配度;
33、如果所述豎向曲線匹配度低于預設的閾值,則根據一組豎向距離參數,修正所述目標位置。
34、通過采用上述技術方案,借助多個位于第一目標頂部且垂直向下的距離傳感器,在提升高度測量精度與保障作業穩定性上效果顯著。當識別到第一目標圖形后,多個距離傳感器能夠快速獲取一組豎向距離參數,這些參數全面且精確地反映了罐口頂部不同位置到地面的垂直距離信息。通過對這組參數進行計算,可得到高度數據,確保高度測量的準確性。同時,將豎向距離參數擬合成豎向波動曲線,并與預設的豎向距離曲線進行波動幅度匹配,計算豎向曲線匹配度,這為判斷罐口高度的一致性與標準性提供了量化依據。若豎向曲線匹配度低于預設閾值,說明罐口可能存在傾斜或變形等異常情況,此時依據豎向距離參數對目標位置進行修正,能夠有效糾正因罐口異常導致的發貨頭定位偏差。這不僅降低了發貨過程中物料泄漏的風險,保障了作業環境的安全與清潔,還減少了因反復調整發貨頭位置造成的時間浪費,極大地提升了裝車效率,確保礦渣微粉裝車作業高效、精準、穩定地進行。
35、可選地,基于兩對不同方向對稱設置于第二目標兩側,且傾斜朝向于第一目標的激光測距裝置,每對激光測距裝置包括兩組互相對稱的激光測距裝置,方法包括如下步驟:
36、獲取每組激光測距裝置中每個激光脈沖的發射和接收的時間差,根據所述時間差基于預設的算法分別計算每個激光測距裝置距離第一目標的高度數據,每對得到兩組高度數據;
37、計算每對激光測距裝置中兩組高度數據的匹配度,若匹配度均大于預設的參考值,則發出驅動第二目標的指令。
38、通過采用上述技術方案,利用對稱設置于發貨頭兩側且傾斜朝向罐口的兩組激光測距裝置,為實現這一目標提供了可靠保障。通過獲取每組激光測距裝置中每個激光脈沖發射和接收的時間差,依據預設算法能夠分別精確計算出每個裝置與罐口的高度數據,進而得到兩組高度數據。這種多組數據測量的方式,有效避免了單一裝置可能產生的測量誤差,極大地提升了高度數據的準確性。隨后計算兩組高度數據的匹配度,當匹配度大于預設參考值時,說明兩側測量數據高度一致,反映出罐口高度位置的準確性和穩定性,此時發出驅動發貨頭的指令。這一過程確保了發貨頭在移動前,罐口高度位置已被準確獲取且符合操作要求,有效降低了因發貨頭盲目移動導致的對準失誤風險。不僅保障了發貨過程中物料傳輸的順暢性,減少物料泄漏對作業環境的污染,還避免了因反復調整發貨頭位置而造成的時間浪費,大幅提升了礦渣微粉裝車作業的整體效率。
39、可選地,方法還包括如下步驟:
40、獲取噪聲參數,對所述噪聲參數進行頻率分析;
41、若從所述噪聲參數中提取出特征頻率,計算所述特征頻率的能量值;
42、根據所述能量值正相關調節n的大小,所述能量值越大,所述n越大,所述能量值越小,所述n越小;
43、以及根據所述能量值正相關調節清潔時間,所述能量值越大,所述清潔時間越久,所述能量值越小,所述清潔時間越短。
44、通過采用上述技術方案,系統根據能量值正相關調節n(圖像采集頻率)。當車輛剎車頻繁,即能量值較大時,增大n值,增加單位時間內圖像采集的數量。這樣做的好處是,在車輛頻繁移動導致圖像容易出現模糊、抖動等干擾的情況下,通過更多的圖像采集并配合平均濾波等處理手段,能夠有效去除因車輛移動帶來的圖像干擾,顯著提升圖像的清晰度和穩定性,為后續精準識別車輛罐口(第一目標)位置提供更可靠、準確的圖像數據基礎,有力保障發貨頭(第二目標)與罐口對準的精度,避免因圖像質量不佳導致的對準失誤,提高裝車作業的準確性。同時,系統依據能量值正相關調節清潔時間。由于車輛頻繁剎車可能會揚起更多灰塵,導致作業環境中的污染物增加。當能量值越大,即剎車越頻繁時,延長清潔時間。這能夠及時、有效地清理激光測距裝置、攝像裝置等設備表面及光學元件上附著的灰塵等污染物,防止污染物對設備性能產生不良影響,確保激光測距裝置能夠準確測量罐口高度數據,攝像裝置能夠清晰采集圖像數據,維持整個系統高度數據測量以及圖像采集與識別的準確性,保證設備始終處于良好運行狀態。通過對車輛剎車聲音特征頻率及其能量值的巧妙利用,實現了對圖像采集頻率和設備清潔時間的動態、智能調節,使整個礦渣微粉裝車系統能夠更好地適應復雜多變的作業場景,有效提升了裝車作業的穩定性、準確性與高效性,降低了因車輛位置調整困難和環境干擾導致的作業失誤風險,全面優化了裝車作業流程。
45、第二方面,本技術提供一種基于物聯網的精準泊車控制系統,采用如下的技術方案:
46、一種基于物聯網的精準泊車控制系統,包括處理器,所述處理器中執行如上述任意一項所述的基于物聯網的精準泊車控制方法的步驟。
47、第三方面,本技術提供一種存儲介質,采用如下的技術方案:
48、一種存儲介質,所述存儲介質中存儲有程序,所述程序被處理器執行時實現上述任意一項所述的基于物聯網的精準泊車控制方法的步驟。
49、綜上所述,本技術包括以下至少一種有益技術效果:
50、精準定位罐口:通過預設的第一算法從現場圖像數據中識別罐口,并計算其位置和高度,為后續精確調整下料管位置提供了準確依據,提高了定位的精準度,減少了人工判斷的誤差。
51、自適應調整高度:根據罐口高度數據正相關調節預設下料位置的高度參數,使下料管能更好地適應不同高度的車輛罐口,增強了系統的通用性和適應性,避免因罐口高度差異導致的對位困難,進一步提升了對位效率。
52、實時引導對位:計算罐口位置與預設下料位置的距離差值和方向并輸出,能實時為系統調整下料管位置提供明確的引導,使下料管能快速、準確地向罐口移動,有效縮短了對位時間,提高了工作效率。
53、精準控制下料管移動:在發出驅動下料管的指令后,基于第二算法識別下料管圖形,并計算其移動距離值和與罐口的輪廓重合數據,確保下料管精準對準罐口。同時,移動參考值反相關于罐口高度參數,實現了根據罐口高度動態調整下料管移動的精度控制,進一步保障了對位的準確性和高效性。
54、及時反饋泊車結果:根據輪廓重合數據判斷泊車是否成功并給出相應提示,方便操作人員及時了解對位情況。若泊車失敗可及時調整,避免了無效操作和時間浪費,有助于持續優化對位過程,提升整體工作效率。
- 還沒有人留言評論。精彩留言會獲得點贊!