一種三電平變流器二維尋優模型預測控制方法及裝置與流程
本發明屬于三電平逆變器控制領域,尤其涉及一種三電平變流器二維尋優模型預測控制方法及裝置。
背景技術:
1、隨著新型能源在電力系統占比的增加,電力系統的慣性下降,穩定性降低。因此,需要額外增加儲能設備,既可以提高系統的穩定性,又可以彌補新能源發電存在間歇性和不確定性的缺點。電力電子變流器作為光伏,風電以及儲能電池與傳統電網的接口,對整個系統的效率和穩定性起關鍵作用。相比于兩電平變流器,三電平變流器具有容量大,電壓等級高,輸出電流質量好等優點,在中壓大功率應用場合得到廣泛應用。
2、模型預測控制具有諸多優點,包括動態響應速度快,靈活性高,魯棒性好,便于設計整定,可以在單個控制環中處理多變量約束和實現多變量控制等。模型預測控制的基本原理是在每個控制周期中,計算各個可行電壓矢量的成本函數值,并將最小成本函數值對應的電壓矢量作為最優電壓矢量,在下一控制周期中實施。上述原理導致了模型預測控制的計算量較大,且計算量與電力電子變流器的電平數量呈現指數關系上漲,限制了模型預測控制的大范圍推廣和低成本普及。
3、為解決上述問題,迫切的需要開發一種高效、低計算量的模型預測控制方法。
技術實現思路
1、本發明目的在于提供一種三電平變流器二維尋優模型預測控制方法及裝置。用于解決傳統模型預測控制方法中算法計算量高的問題。本發明提出的二維尋優方法,可以避免電壓矢量的枚舉,能夠在保留模型預測原有優勢的前提下,有效降低算法的計算負擔。
2、為實現上述目的,本發明實施例提供如下技術方案:
3、本發明提供了一種三電平變流器二維尋優模型預測控制方法,其特征在于,所述方法包括:
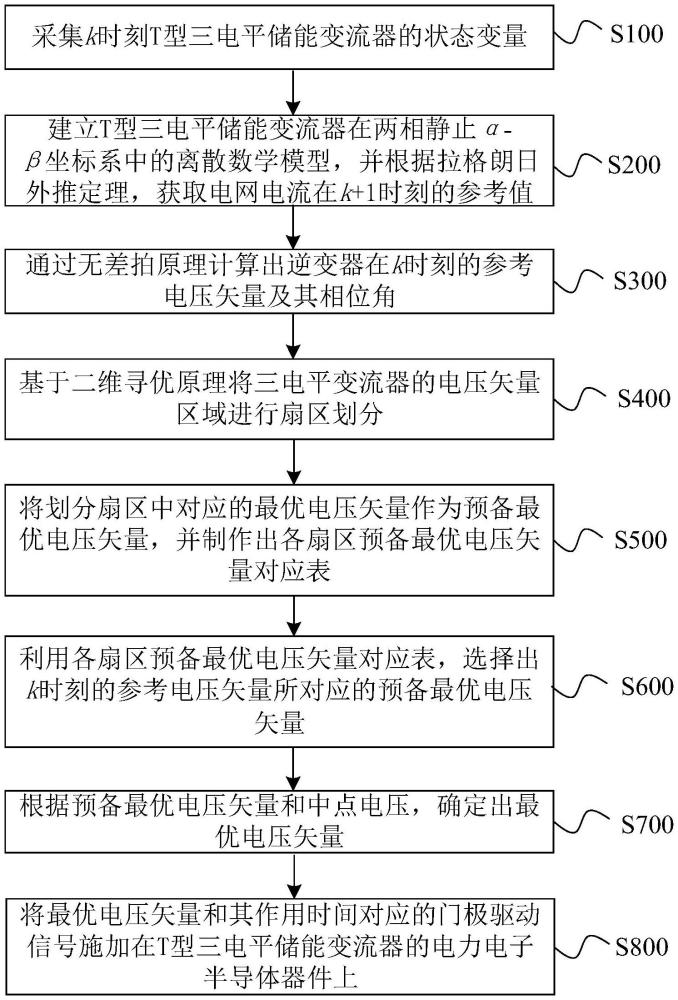
4、采集k時刻t型三電平變流器的狀態變量;所述狀態信息包括電網電流、電網電壓、直流側上下母線電容電壓;
5、建立三電平變流器在兩相靜止α-β坐標系中的離散數學模型,并根據拉格朗日外推定理,得出在α-β坐標系下的電網電流在k+1時刻的參考值;
6、通過無差拍原理計算出逆變器在k時刻的參考電壓矢量及其相位角;
7、基于二維尋優原理將三電平變流器的電壓矢量區域進行扇區劃分;
8、將劃分扇區中對應的最優電壓矢量作為預備最優電壓矢量,并制作出各扇區預備最優電壓矢量對應表;
9、利用各扇區預備最優電壓矢量對應表,選擇出k時刻的參考電壓矢量所對應的預備最優電壓矢量;
10、根據預備最優電壓矢量和中點電壓,確定出最優電壓矢量;
11、將最優電壓矢量對應的門極驅動信號施加在三電平變流器的電力電子半導體器件上。
12、對應的門極驅動信號施加在t型三電平儲能變流器的電力電子半導體器件上。
13、在一種實施方式中,所述t型三電平儲能變流器在兩相靜止α-β坐標系中的離散數學模型為:
14、
15、式中,l、r分別為濾波電感的電感值及其等效電阻,ts為采樣周期;iα(k),iβ(k)為k時刻α-β坐標系中電網電流采樣值;iα(k+1),iβ(k+1)為k+1時刻α-β坐標系中電網電流預測值;eα(k),eβ(k)為k時刻α-β坐標系中電網電壓采樣值;uα(k),uβ(k)為k時刻α-β坐標系變流器交流側輸出電壓,uo(k),uo(k+1)分別為k和k+1時刻的直流側中點電壓值;io(k)為k時刻直流側中點電流值;c1,c2分別為直流側上下母線電容的容值;ts為控制系統的控制周期。
16、在一種實施方式中,所述根據拉格朗日外推定理計算出電網電流在k+1時刻的參考值為:
17、
18、式中,分別為α軸電網電流在k+1,k,k-1,k-2時刻的參考值,分別為β軸電網電流在k+1,k,k-1,k-2時刻的參考值。
19、在一種實施方式中,無差拍原理即令網側電流在k+1時刻的預測值等于通過拉格朗日外推定理得出的網側電流參考值,進而計算出逆變器在k時刻的參考電壓矢量為:
20、
21、式中,分別為參考電壓在α、β軸的分量。
22、參考電壓矢量的相位角θ為:
23、
24、在一種實施方式中,將三電平變流器的電壓矢量區域劃分為6個大扇區,每個大扇區又分為6個小扇區;所述6個大扇區根據參考電壓矢量相位角大小進行劃分,所述小扇區是將參考電壓矢量旋轉至第1大扇區得出等效相位角,根據等效相位角大小進行劃分;
25、在α-β坐標系中對參考電壓矢量按照β軸和α軸兩個維度對電壓矢量進行定位,可將參考電壓矢量可以表示為:
26、
27、其中uref和θref分別為參考電壓的幅值和相位角;
28、6個大扇區與參考電壓矢量相位角的關系為:
29、第1大扇區對應相位角為0<θref≤π/3;
30、第2大扇區對應相位角為π/3<θref≤2π/3;
31、第3大扇區對應相位角為2π/3<θref≤π;
32、第4大扇區對應相位角為-π<θref≤-2π/3;
33、第5大扇區對應相位角為-2π/3<θref≤-π/3;
34、第6大扇區對應相位角為-π/3<θref≤0。
35、三電平變流器二維尋優模型預測控制方法,為了減少計算復雜度,將參考電壓矢量旋轉至第1大扇區,等效相位角為:
36、θrefr=θref-(n-1)*π/3
37、其中n為參考電壓所在的大扇區;
38、等效的參考電壓矢量為:
39、
40、6個小扇區與等效參考電壓矢量的關系為:
41、相位角限制0≤θrefr≤π/6;
42、邊界限制對應第i小扇區;
43、邊界限制及對應第ⅳ小扇區;
44、邊界限制及對應第ⅴ小扇區;
45、邊界限制及對應第ⅱ小扇區;
46、邊界限制對應第i小扇區;
47、邊界限制及對應第ⅵ小扇區;
48、邊界限制及對應第ⅴ小扇區;
49、邊界限制及對應第ⅲ小扇區。
50、在一種實施方式中,零電壓矢量僅考慮“000”狀態,即v1,各個大扇區中小扇區對應的最優電壓矢量為:
51、第1大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v4和v5、第ⅲ小扇區最優電壓矢量為v6和v7、第ⅳ小扇區最優電壓矢量為v22、第ⅴ小扇區最優電壓矢量為v16、第ⅵ小扇區最優電壓矢量為v23;
52、第2大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v6和v7、第ⅲ小扇區最優電壓矢量為v8和v9、第ⅳ小扇區最優電壓矢量為v23、第ⅴ小扇區最優電壓矢量為v17、第ⅵ小扇區最優電壓矢量為v24;
53、第3大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v8和v9、第ⅲ小扇區最優電壓矢量為v10和v11、第ⅳ小扇區最優電壓矢量為v24、第ⅴ小扇區最優電壓矢量為v18、第ⅵ小扇區最優電壓矢量為v25;
54、第4大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v10和v11、第ⅲ小扇區最優電壓矢量為v12和v13、第ⅳ小扇區最優電壓矢量為v25、第ⅴ小扇區最優電壓矢量為v19、第ⅵ小扇區最優電壓矢量為v26;
55、第5大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v12和v13、第ⅲ小扇區最優電壓矢量為v14和v15、第ⅳ小扇區最優電壓矢量為v26、第ⅴ小扇區最優電壓矢量為v20、第ⅵ小扇區最優電壓矢量為v27;
56、第6大扇區中,第ⅰ小扇區最優電壓矢量為v1、第ⅱ小扇區最優電壓矢量為v14和v15、第ⅲ小扇區最優電壓矢量為v4和v5、第ⅳ小扇區最優電壓矢量為v27、第ⅴ小扇區最優電壓矢量為v21、第ⅵ小扇區最優電壓矢量為v22。
57、在一種實施方式中,所述根據預備最優電壓矢量和中點電壓,確定出最優電壓矢量,包括:
58、當預備最優電壓矢量為零,中,大電壓矢量時,預備最優電壓矢量即為最優電壓矢量;
59、當預備最優電壓矢量為小電壓矢量時,結合中點電壓從預備最優電壓矢量中選擇最優電壓矢量。
60、在一種實施方式中,將小電壓矢量分為p型電壓矢量和n型電壓矢量;所述p型電壓矢量可以升高中點電壓,所述n型電壓矢量可以降低中點電壓;
61、結合直流側中點電壓的動態數學模型得出當中點電壓大于零時,選擇n型電壓矢量;當中點電壓小于零時,選擇p型電壓矢量。
62、本發明還提供了一種三電平變流器二維尋優模型預測控制裝置,所述裝置包括:
63、采集模塊,用于采集k時刻t型三電平儲能變流器的狀態變量;所述狀態變量包括電網電流、網側電壓及電容電壓;
64、離散數學模型模塊,用建立t型三電平儲能變流器在兩相靜止α-β坐標系中的離散數學模型,并根據拉格朗日外推定理,獲取電網電流在k+1時刻的參考值;
65、計算模塊,用于通過無差拍原理計算出逆變器在k時刻的參考電壓矢量及其相位角;
66、二維尋優的電壓矢量扇區劃分模塊,用于基于二維尋優原理將三電平變流器的電壓矢量區域進行扇區劃分;
67、預備最優電壓矢量表模塊,用于將各個大扇區中小扇區對應的最優電壓矢量作為預備最優電壓矢量,并制作出各扇區預備最優電壓矢量對應表;
68、預備最優電壓矢量確定模塊,利用各扇區預備最優電壓矢量對應表,選擇出k時刻的參考電壓矢量所對應的預備最優電壓矢量;
69、最優電壓矢量確認模塊,用于根據預備最優電壓矢量和中點電壓,確定出最優電壓矢量;
70、動作模塊,用于將最優電壓矢量和其作用時間對應的門極驅動信號施加在t型三電平儲能變流器的電力電子半導體器件上。
71、本技術實施例提供的技術方案可以包括以下有益效果:
72、本發明能夠在實現三電平儲能變流器中點電壓平衡和穩定運行的前提下,減小電流紋波并提升電流質量。提出的混合模型預測控制,不同于具有離散輸出特性的傳統模型預測控制,最優電壓矢量在控制周期起始時刻就要執行。而是通過計算,在控制周期中的特定時刻進行切換,得到了時間連續的輸出特性,提高了電流質量。
- 還沒有人留言評論。精彩留言會獲得點贊!