一種高層建筑外墻智能分層往復式噴涂機器人及噴涂方法與流程
本發明涉及高層建筑外墻噴涂領域,尤其是能夠對高層建筑外墻進行分層往復式噴涂的機器人。
背景技術:
1、高層建筑外墻智能分層往復式噴涂是一種高度自動化、精準化的外墻噴涂解決方案。它借助先進的機器人技術、智能控制算法以及傳感器融合技術,實現對高層建筑外墻的高效、均勻噴涂,極大地提高了噴涂作業的質量和安全性,降低了人力成本和施工風險。
2、在具體的噴涂作業前,雖然可以使用激光掃描設備或其他測量工具對建筑外墻進行數據采集,獲取外墻的精確尺寸、形狀以及門窗、陽臺等特殊結構的位置信息,將采集到的數據傳輸至智能控制系統,系統對數據進行處理和分析,生成詳細的建筑外墻三維模型,根據生成的外墻三維模型,智能控制系統利用優化的路徑規劃算法,結合噴涂工藝要求,為噴涂機器人規劃出合理的分層往復式噴涂路徑,路徑規劃過程中充分考慮了墻面的平整度、障礙物分布以及涂料的覆蓋范圍等因素,確保每個區域都能被均勻噴涂,同時避免機器人與障礙物發生碰撞。但是在具體的執行中,由于噴涂作業都是通過噴頭進行的,而噴頭具有一定的噴灑范圍,因此這樣的路徑規劃在范圍化的噴頭噴涂中會產生較大的誤差。
3、同時,在具體的使用中,盡管可以測得外墻的精確尺寸、形狀以及門窗、陽臺等特殊結構的位置信息,但是由于門窗、陽臺、外墻腰線等特殊結構普遍尺寸小,且差異大,這樣在分層噴涂,尤其是不同色彩的噴涂時,難以實現精確噴涂覆蓋,可能會導致噴涂范圍小了,而增加噴涂時間,或者噴涂范圍大了,造成對已噴涂區域的影響,所以對于這些區域,在施工中,一般還是由人工進行,無法實現全面自動化的智能分層往復式噴涂。因此提出一種高層建筑外墻智能分層往復式噴涂機器人及噴涂方法。
技術實現思路
1、為了克服現有技術的不足,本發明提出一種高層建筑外墻智能分層往復式噴涂機器人及噴涂方法,能夠在對高層建筑外墻進行智能分層的往復式噴涂時,還能夠對門窗、陽臺、外墻腰線等特殊結構進行精確分層往復式噴涂。
2、為了解決上述的技術問題,本發明提出的基本技術方案為:
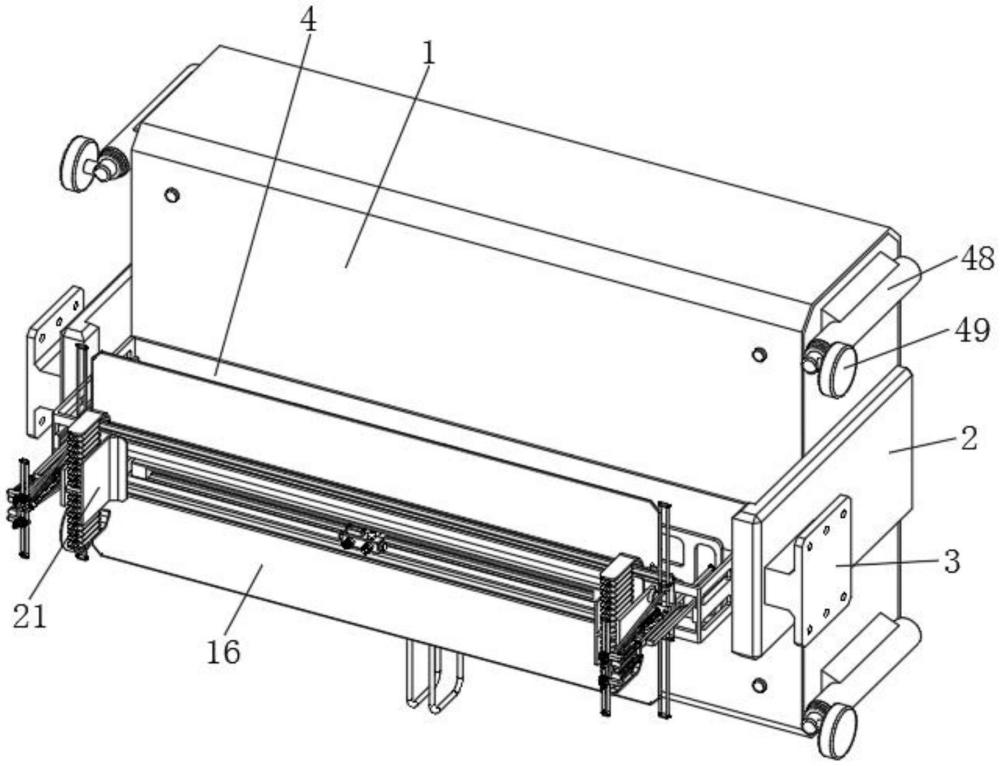
3、一種高層建筑外墻智能分層往復式噴涂機器人,包括涂料箱,涂料箱的前側設置有安裝框,安裝框的前側連接有支撐框,且安裝框內滑動連接有滑板框,所述支撐框上安裝有滑軌二,且滑軌二內滑動連接有滑塊二,所述滑塊二內貫穿的嵌裝有伸縮件一,所述伸縮件一上安裝有噴頭,所述支撐框上下兩側均轉動連接有正擋板,所述滑板框上連接有用于對正擋板推動轉動的推桿;
4、所述支撐框的兩側均滑動設置有側擋板,所述支撐框上設置有驅動組件,所述驅動組件用于驅動兩側的側擋板互相靠近或者遠離,所述支撐框上滑動設置有刮板一,所述支撐框設置有清潔組件一,所述清潔組件一用于帶動刮板一進行滑動,以對正擋板的表面進行刮擦,所述側擋板上滑動設置有刮板二,所述側擋板上設置有清潔組件二,所述清潔組件二用于帶動刮板二進行滑動,以對側擋板的表面進行刮擦。
5、優選的,所述涂料箱的兩側均連接有側板,所述安裝框處于涂料箱的前側,且兩端分別與兩側的側板連接,兩側的所述側板互相遠離側均連接有用于安裝吊籃提升機的安裝座,所述安裝框的兩側內壁均安裝有滑軌一,所述滑軌一內滑動連接有滑塊一,所述滑板框的兩側分別與兩側的滑塊一連接。
6、優選的,所述支撐框上安裝有限位座,所述限位座與各自一側的正擋板之間連接有拉簧,每個所述限位座均與各自一側的正擋板抵觸限位,每個所述正擋板上均連接有凸條,所述推桿與凸條貼合滑動連接。
7、優選的,所述驅動組件包括絲桿、導桿、驅動電機,所述絲桿轉動連接在支撐框,所述導桿的兩端固定連接在支撐框上,所述驅動電機安裝在支撐框上,且驅動電機的輸出端與絲桿的一端連接,所述側擋板螺紋套設在絲桿的表面,并滑動套設在導桿的表面,所述側擋板處于滑軌二的前側,所述絲桿在支撐框前側的外側面兩端螺紋旋向為相反設置。
8、優選的,所述支撐框上連接有導向桿一,所述刮板一的兩端均滑動套設在對應的導向桿一的外側,所述側擋板上下兩側還對稱的連接方形橡膠波紋筒,所述方形橡膠波紋筒遠離側擋板的一端連接有弧板,所述弧板與側擋板之間連接有彈簧三,所述彈簧三處于方形橡膠波紋筒內,所述正擋板與弧板貼合抵觸。
9、優選的,所述清潔組件一包括導向桿二、l形滑桿、彈簧一、推拉框、穩定桿,所述導向桿二連接在支撐框上,并垂直于導向桿一,所述穩定桿連接在支撐框的后側,所述l形滑桿的一端滑動套設在導向桿二的外側,另一端與穩定桿滑動套設,所述l形滑桿的前端與上下兩個刮板一之間轉動連接有轉板一,所述導向桿二的外側套設有彈簧一,且彈簧一的兩端分別連接在支撐框與l形滑桿上,所述推拉框連接在滑板框上,并延伸至支撐框的前側與l形滑桿配合抵觸牽拉。
10、優選的,所述導向桿二的前端連接有t形座,且t形座的上下兩側均連接有導向桿三,每個所述導向桿三的外側均套設滑塊三,且滑塊三上安裝有小萬向輪,所述t形座的一側連接有導向桿四,且導向桿四的外側套設有滑板,所述滑板與上下側的滑塊三之間均轉動連接有轉板二,所述導向桿四的外側套設有彈簧四,且彈簧四的兩端分別與t形座和滑板連接,所述推拉框的前端與滑板配合抵觸。
11、優選的,所述清潔組件二包括滑桿、滑座、頂板,所述滑桿貫穿的滑動連接在側擋板上,且滑桿分別布置在滑軌二的上下兩側,并滑動延伸至支撐框的后側,所述刮板二連接在滑桿的前端,所述滑座滑動套設有在滑桿的后端,所述支撐框的后側開設有滑槽,所述滑座滑動連接在滑槽內,所述滑桿的外側套設有彈簧二,且彈簧二的兩端分別與滑座和滑桿連接,所述頂板連接在滑板框上,并處于滑軌二的兩端外側,所述刮板二的一端延伸在側擋板的外側,所述頂板與刮板二的延伸端配合抵觸。
12、優選的,所述伸縮件一的前側安裝有多功能傳感器模塊,所述噴頭安裝在多功能傳感器模塊上,并為多個設置,每個所述噴頭均連接有軟管,所述涂料箱內分為多個隔倉,每個所述隔倉外側均安裝有泵體,每個所述軟管的另一端均與泵體來連接,所述涂料箱的外側安裝有伸縮件二,且伸縮件二的輸出端安裝有大萬向輪,所述正擋板上螺栓安裝有活動擋板。
13、一種高層建筑外墻智能分層往復式噴涂機器人的噴涂方法,包括以下步驟:
14、步驟一:在涂料箱的兩側安裝吊籃提升機,并配置用于控制的控制箱,然后在高層建筑樓頂固定鋼絲繩,并將鋼絲繩與吊籃提升機進行對應裝配,最后將涂料箱內灌注涂料,并通過吊籃提升機升降柱工作位置;
15、步驟二:直接通過噴頭將涂料箱內的涂料噴涂在高層建筑外墻,并通過滑軌二帶動滑塊二在其內水平往復滑動,實現往復的噴涂;
16、步驟三:當需要對高層建筑進行分層噴涂時,驅動滑板框向遠離涂料箱的方向滑動,即可帶動推桿推動正擋板轉動至傾斜或者水平,同時通過驅動組件帶動兩側的側擋板互相靠近,并與轉動的正擋板形成合圍區域,此時噴頭噴涂范圍即為合圍區域,以實現進準的分層噴涂;
17、步驟四:由于噴頭處于正擋板與側擋板調節后的合圍區域內,當使用結束后,先復位正擋板至豎直狀態和復位兩側的側擋板互相遠離至最大間距狀態,然后通過清潔組件一帶動刮板一往復上下移動,對正擋板表面沾染的涂料進行刮除,通過清潔組件二帶動刮板二往復移動對側擋板表面沾染的涂料進行刮除。
18、本發明的有益效果是:
19、1、本發明的技術方案通過驅動滑板框的前移,即可帶動推桿推動正擋板由豎直狀態進行轉動,以及可以通過驅動組件帶動兩側的側擋板互相靠近或者遠離,進而通過上下正擋板與左右側擋板之間的合圍配合,而形成不同尺寸的開口范圍,使得在合圍區域內的噴頭在合圍區域內往復滑動噴涂時,其噴涂區域也就是合圍區域的投影面積,既能夠通過滑塊二的往復滑動帶動噴頭實現往復的分層噴涂,還能夠對門窗、陽臺、外墻腰線等特殊結構進行精準的自動化噴涂;
20、2、本發明的技術方案通過清潔組件一帶動刮板一上下滑動,可以對處于豎直狀態的正擋板進行刮擦清潔,以及通過清潔組件二帶動刮板二前后滑動,可以對兩側處于最大間距狀態的側擋板進行刮擦清潔,這樣當正擋板與側擋板進行合圍時,噴頭的涂料可能會噴砂在側擋板和正擋板上,而通過刮板一與刮板二的作用,就可以實現靈活便利的清潔,避免后期涂料干結而不便于清理的情況發生;
21、3、本發明的技術方案通過在噴涂施工過程中,還可以通過帶動滑板框前移,而帶動l形滑桿推動滑板前移,帶動t形座上下側滑動設置的滑塊三上的小萬向輪上下的互相遠離展開,實現與高層建筑外墻墻面的接觸,并配合大萬向輪,進一步提升使用時的穩定性。
- 還沒有人留言評論。精彩留言會獲得點贊!