劃線標定系統及方法與流程
本發明涉及位置標記,特別是涉及一種劃線標定系統及方法。
背景技術:
1、道路交通標線是指在道路表面上劃設的各種標記線,用以指示車輛行駛的方向、位置和限制,并幫助規范交通流動。道路交通標線通常采用不同顏色和形狀的線條、箭頭、圖案等來傳達特定的交通信息,以提高道路交通安全性和效率。道路交通標線的繪制是由專門的道路交通標線繪制人員或者機械設備完成的。
2、在道路劃線施工中,需要進行打點定位,以獲得當前需要劃線的路徑。然后將打點定位標記繪制路線圖進行畫線。現有的定位一般是通過互聯網或gps等方式進行定位,當在一些信號差或者偏遠地區的位置則定位精度較差,因此需要針對現有定位方式做新的改進。
技術實現思路
1、為解決上述問題,本發明通過集成先進的定位技術與智能控制邏輯,不僅顯著提升了劃線作業的精準度與效率,還增強了作業過程的靈活性與可控性,為各類劃線工程提供了高效、可靠的解決方案的劃線標定系統及方法。
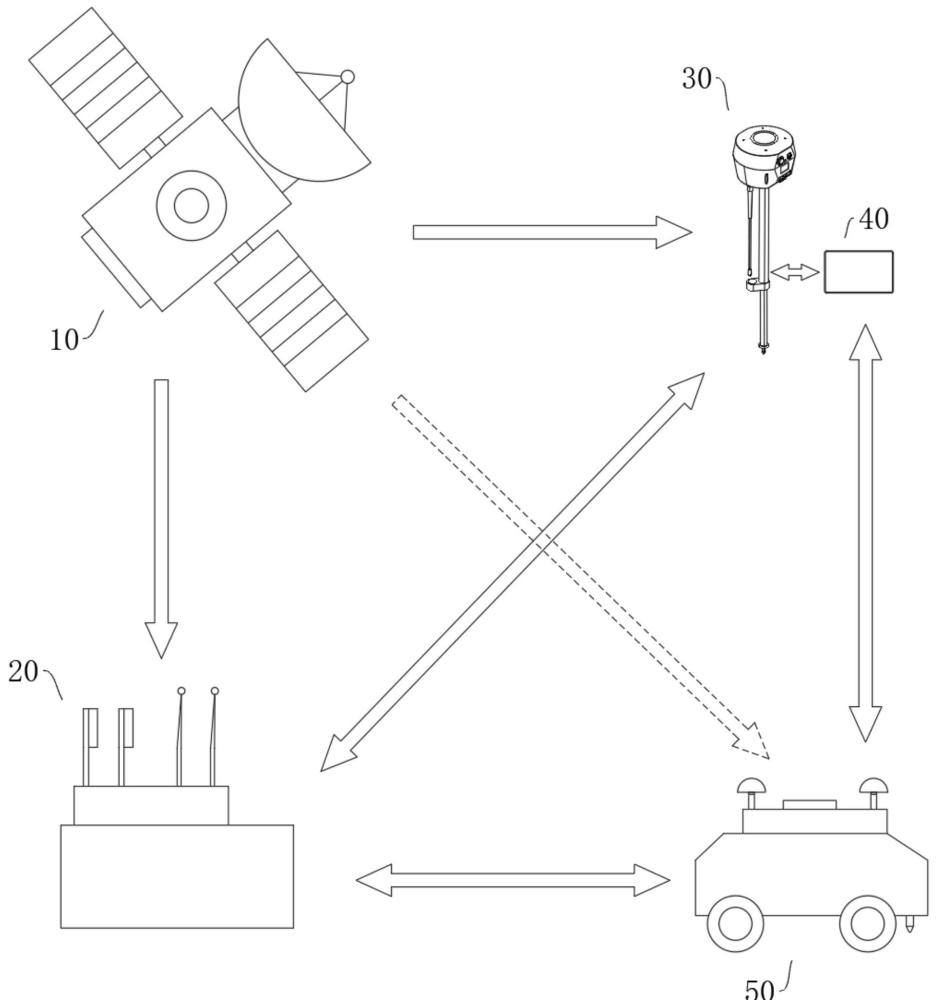
2、本發明所采用的技術方案是:一種劃線標定系統,包括衛星定位裝置、基站定位裝置、手持打點裝置、控制裝置以及移動劃線裝置,所述衛星定位裝置用于基站定位裝置、手持打點裝置和移動劃線裝置的位置進行定位,所述基站定位裝置用于對手持打點裝置和移動劃線裝置的位置進行定位,將所述衛星定位裝置所定位手持打點裝置和移動劃線裝置的位置與基站定位裝置所定位手持打點裝置和移動劃線裝置的位置進行校準,得到手持打點裝置以及移動劃線裝置精確位置;所述控制裝置與手持打點裝置和移動劃線裝置通信連接,所述手持打點裝置在場地上移動打點標記,完成至少2個標記點,所述控制裝置用于控制所述移動劃線裝置根據至少2個標記點行駛,并在行駛過程中進行劃線。
3、對上述方案的進一步改進為,校準過程由差分定位校準模塊執行,通過對比衛星定位裝置與基站定位裝置傳輸的坐標數據,采用動態誤差補償算法消除多路徑效應和電離層延遲誤差,以得到手持打點裝置以及移動劃線裝置精確位置。
4、對上述方案的進一步改進為,所述基站定位裝置設置有基站通信模塊,所述基站通信模塊為雙模連接切換模塊,可動態選擇無線電臺直連通信或4g/5g網絡通信進行數據傳輸,所述切換模塊與基站定位裝置、手持打點裝置通信連接,并用于數據傳輸。
5、對上述方案的進一步改進為,所述手持打點裝置包括主機以及手持桿,所述主機設置在手持桿的端部,所述主機包括外殼、打點控制板、電源以及打點定位模塊;所述打點控制板和電源均設置在外殼內,所述電源用于打點控制板供電,所述打點定位模塊與打點控制板電連接、并用于定位手持打點裝置當前位置,所述外殼靠近手持桿的一端設置有位置標記按鈕,所述位置標記按鈕與打點控制板電連接,以驅動打點定位模塊對手持打點裝置當前位置進行標記。
6、對上述方案的進一步改進為,所述手持打點裝置設置有定位校正模塊,所述定位校正模塊用于打點定位模塊對當前位置進行標記時對定位裝置與地面的水平度進行校正。
7、對上述方案的進一步改進為,所述控制裝置為移動終端,所述控制裝置靠近手持打點裝置,并記錄手持打點裝置所記錄的標記點,并將至少2個標記點串聯形成行駛路線,將行駛路線傳輸給到所述劃線移動裝置,劃線移動裝置根據行駛路線行走劃線。
8、對上述方案的進一步改進為,所述移動終端設有路徑規劃模塊,所述路徑規劃模塊執行以下操作:通過svd奇異值分解算法對標記點坐標進行拓撲優化,將原始標記點序列轉換為雙圓弧樣條路徑;
9、生成gnss坐標到局部施工坐標的轉換參數矩陣:
10、
11、其中(x0,y0)為基準點,θ為坐標旋轉角;
12、通過mqtt協議向移動劃線裝置發送實時路徑修正指令。
13、對上述方案的進一步改進為,所述移動終端集成有動態軌跡修正模塊,當接收手持打點裝置發來的坐標更新數據時,按iso?8601格式標注時空同步索引,同時執行:
14、基于修改后的標記點坐標重計算貝塞爾曲線控制多邊形頂點;
15、對比前后路徑曲率變化量δκ,當δκ>0.15m?1時自動插入新的航點;
16、生成包含wgs84坐標系和施工坐標系雙精度值的電子任務單。
17、一種劃線標定方法,包括所述的劃線標定系統,方法包括如下步驟:
18、步驟s1.?建立衛星定位基準網,獲取初始定位數據;
19、步驟s2.?部署地基增強系統并構建rtk定位服務;
20、步驟s3.?通過雙模通信鏈路同步衛星定位數據與基站定位數據;
21、步驟s4.?采用卡爾曼濾波算法實現多源定位數據的動態融合;
22、步驟s5.?依據聯合解算結果確定高精度坐標控制點;
23、步驟s6.?手持設備生成標記點時自動采集地形起伏參數;
24、步驟s7.?路徑規劃模塊進行三維空間軌跡擬合;
25、步驟s8.?劃線裝置執行作業時實時監測dop值,當精度因子惡化時觸發數據重傳機制;
26、步驟s9.?通過機器學習模型持續優化基站部署策略。
27、對上述方案的進一步改進為,
28、步驟s1中.?建立多源衛星基準網,獲取初始定位數據時同步采集gps?l1/l5、glonass?g1/g3和北斗b1i/b2i三頻段的載波相位觀測值,形成原始觀測文件;
29、步驟s2中.部署地基增強系統時,根據地形起伏度采用自適應基站布局算法,使相鄰基站間距d滿足:d≤(3h+50)米(其中h為最大地形高差),構建網絡rtk定位服務時采用星間單差技術消除接收機鐘差;
30、步驟s3中.通過雙模通信鏈路同步數據時,當網絡時延δt>100ms自動切換電臺直連,定位數據幀包含時戳校驗碼、定位模式標識符和crc16校驗位;
31、步驟s4中.采用改進卡爾曼濾波進行數據融合時,引入慣性導航單元輸出的角速度ω和加速度α作為狀態預測參數,建立動力學模型:
32、
33、其中過程噪聲協方差矩陣q動態調整,與當前多路徑效應強度正相關;
34、步驟s5中.?聯合解算時采用抗差估計策略,對殘差v_i大于3倍中誤差的觀測值進行淘汰迭代,生成控制點時坐標精度滿足:水平誤差σ_h≤2mm+1ppm,高程誤差σ_v≤3mm+1.5ppm。
35、本發明有益效果是:
36、相比現有的劃線定位系統,本發明通過衛星定位裝置與基站定位裝置的雙重定位機制,系統能夠實現對手持打點裝置及移動劃線裝置位置的高精度確定。衛星定位提供全局覆蓋的基準信息,而基站定位則利用局部信號增強定位精度,兩者結合有效校準并消除了單一定位方式可能帶來的誤差,確保了手持裝置與劃線裝置位置的絕對精確性。其次,控制裝置與手持打點裝置、移動劃線裝置的無線通信連接,實現了操作指令的即時傳輸與響應,提升了作業效率。操作人員可靈活地在場地內利用手持打點裝置進行標記,控制裝置迅速接收這些位置信息,并依據至少兩個標記點規劃出最優行駛路徑,指導移動劃線裝置精確行駛與劃線,這一過程自動化程度高,大大減少了人工操作的復雜性與時間成本。此外,還具備高度的靈活性與適應性。無論是在開闊地帶還是復雜環境中,都能通過綜合定位策略確保劃線精度,適用于多種場地劃線需求,如道路標線、運動場劃線等,展現了廣泛的應用潛力。本發明中,通過集成先進的定位技術與智能控制邏輯,不僅顯著提升了劃線作業的精準度與效率,還增強了作業過程的靈活性與可控性,為各類劃線工程提供了高效、可靠的解決方案。
37、劃線標定方法,通過建立衛星定位基準網并部署地基增強系統,該方法能夠顯著提升定位精度,確保初始定位數據的可靠性。結合rtk(實時動態差分定位)服務,實現了厘米級甚至毫米級的定位精度,為后續的劃線標定工作奠定了堅實基礎。其次,通過雙模通信鏈路同步衛星與基站定位數據,有效解決了多源數據的時間同步問題,確保了數據的一致性和準確性。采用卡爾曼濾波算法進行動態融合,不僅提高了數據的融合效率,還進一步增強了定位結果的穩定性和魯棒性。在高精度坐標控制點的確定上,該方法通過聯合解算多源定位數據,實現了對控制點的精確標定,為后續的地形測量和劃線作業提供了可靠依據。同時,手持設備在生成標記點時自動采集地形起伏參數,大大提升了作業效率和精度。此外,路徑規劃模塊的三維空間軌跡擬合功能,使得劃線裝置能夠按照預設軌跡進行精確作業,提高了劃線的一致性和美觀度。在作業過程中,實時監測dop(稀釋精度)值,并在精度因子惡化時觸發數據重傳機制,有效保障了作業精度和穩定性。最后,通過機器學習模型持續優化基站部署策略,該方法能夠根據實際作業需求和環境條件,自動調整基站位置和數量,從而實現資源的最優化配置。
- 還沒有人留言評論。精彩留言會獲得點贊!