墻面作業機器人及用于墻面作業機器人的定位導航方法與流程
本發明涉及計算機,尤其涉及一種墻面作業機器人及用于墻面作業機器人的定位導航方法。
背景技術:
1、按照國家規定,建筑項目完成后要對工程進行質量驗收,對墻面進行實測實量是工程質量驗收的重要環節,另一方面,在建筑施工完成后通常需要進行裝修裝飾,而室內墻面膩子噴涂、打磨、乳膠漆噴涂等施工作業是室內裝修的重要步驟。
2、目前大部分墻面作業工序都是由人工完成,為了緩解建筑行業勞動力不足以及提高室內建筑質量驗收和裝修施工作業的智能化、自動化水平,一些施工單位開始使用智能機器人參與室內墻面質量驗收和裝修作業。目前用于墻面測量的實測實量機器人和墻面施工的噴涂打磨機器人需要實現自主定位導航才能進行自動化墻面作業,并且作業要求與所測量或者施工墻面保持一定的精確距離和姿態。
3、針對墻面自動化作業的機器人,大多需要提前構建室內地圖或者導入室內平面圖,才能實現機器人自動化作業,對于沒有圖紙或者圖紙不全的場地需要構建指定格式圖紙,而且圖紙處理過程耗時復雜,操作技術能力要求高,需要提前布置場地,外置設備,十分不便,嚴重降低了機器人的工作效率。
4、目前,針對相關技術中的墻面自動化作業的機器人需要構建指定格式圖紙導致的處理過程耗時復雜,工作效率低的問題,尚未提出有效的解決方案。
技術實現思路
1、本技術的目的是針對現有技術中的不足,提供一種墻面作業機器人、用于墻面作業機器人的定位導航方法、計算機設備和計算機可讀存儲介質,以至少解決相關技術中的墻面自動化作業的機器人需要構建指定格式圖紙導致的處理過程耗時復雜,工作效率低的問題。
2、為實現上述目的,本技術采取的技術方案是:
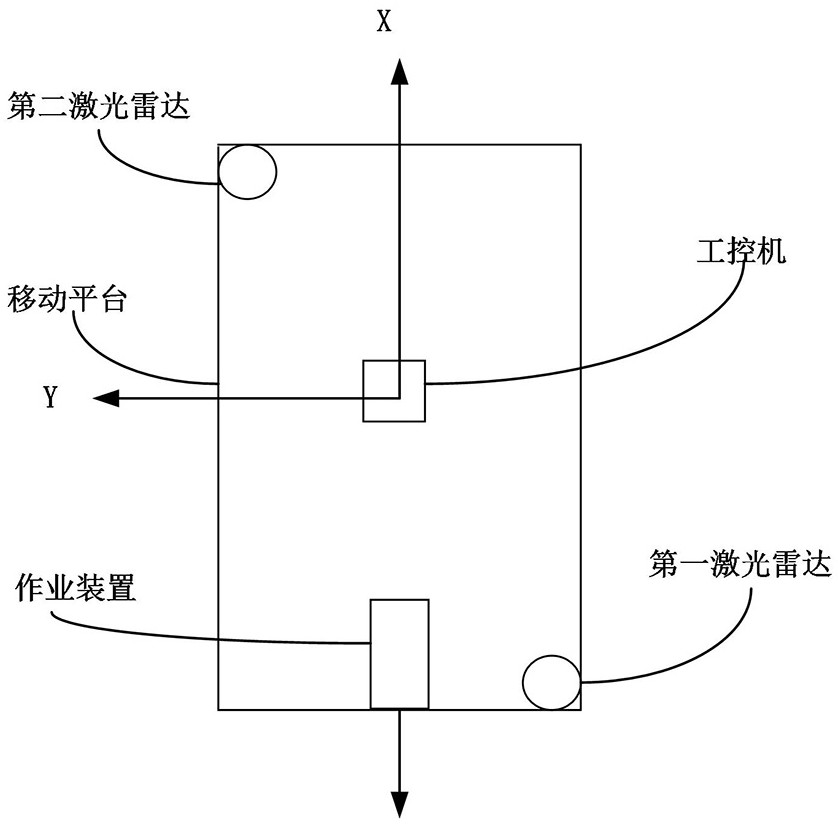
3、第一方面,本技術實施例提供了一種墻面作業機器人,包括移動平臺以及設置在所述移動平臺上的激光雷達、工控機和作業裝置,其中:
4、所述激光雷達用于采集墻面輪廓點云數據,所述激光雷達包括設置在所述移動平臺對角位置的第一激光雷達和第二激光雷達,所述第一激光雷達與所述第二激光雷達的采集范圍覆蓋360度;
5、所述工控機用于根據所述激光雷達采集的所述輪廓點云數據生成控制指令,所述控制指令用于指示所述墻面作業機器人的姿態調整參數和位置移動參數;
6、所述作業裝置用于按照所述控制指令進行作業。
7、在其中一些實施例中,所述工控機用于根據所述激光雷達采集的所述輪廓點云數據生成控制指令,包括:
8、對所述輪廓點云數據進行去噪處理;
9、通過旋轉變換矩陣將去噪處理后的輪廓點云數據從激光雷達坐標系轉換到所述墻面作業機器人的車體坐標系下;
10、在所述車體坐標系下,提取所述墻面作業機器人尾部墻體的輪廓點云數據;
11、基于最小二乘法將所述尾部墻體的輪廓點云數據進行直線擬合,得到擬合直線;
12、根據所述擬合直線的斜率生成所述墻面作業機器人的姿態調整參數;
13、根據所述車體坐標系的原點到所述擬合直線的直線距離生成所述墻面作業機器人的位置移動參數。
14、在其中一些實施例中,所述根據所述擬合直線的斜率生成所述墻面作業機器人的姿態調整參數,包括:
15、在所述擬合直線的斜率為0時,確定所述墻面作業機器人平行于墻面,所述墻面作業機器人直接進行作業;
16、在所述擬合直線的斜率不為0時,根據所述擬合直線的斜率的數值生成所述墻面作業機器人原地旋轉的角度值,其中,所述墻面作業機器人按照所述原地旋轉的角度值原地旋轉之后進行作業。
17、在其中一些實施例中,所述根據所述車體坐標系的原點到所述擬合直線的直線距離生成所述墻面作業機器人的位置移動參數,包括:
18、在所述車體坐標系的原點到所述擬合直線的直線距離小于所述作業裝置距墻面的作業距離時,生成第一位置移動參數,其中,所述第一位置移動參數用于指示所述墻面作業機器人后退;
19、在所述車體坐標系的原點到所述擬合直線的直線距離大于所述作業裝置距墻面的作業距離時,生成第二位置移動參數,其中,所述第二位置移動參數用于指示所述墻面作業機器人前進;
20、在所述車體坐標系的原點到所述擬合直線的直線距離等于所述作業裝置距墻面的作業距離時,控制所述墻面作業機器人位置不移動。
21、第二方面,本技術實施例提供了一種用于墻面作業機器人的定位導航方法,包括:
22、工控機接收激光雷達采集的墻面輪廓點云數據;
23、所述工控機根據所述輪廓點云數據生成控制指令,其中,所述控制指令用于指示所述墻面作業機器人的姿態調整參數和位置移動參數;
24、所述工控機將所述控制指令發送至作業裝置,以指示所述作業裝置按照所述控制指令進行作業。
25、在其中一些實施例中,所述工控機根據所述輪廓點云數據生成控制指令,包括:
26、對所述輪廓點云數據進行去噪處理;
27、通過旋轉變換矩陣將去噪處理后的輪廓點云數據從激光雷達坐標系轉換到所述墻面作業機器人的車體坐標系下;
28、在所述車體坐標系下,提取所述墻面作業機器人尾部墻體的輪廓點云數據;
29、基于最小二乘法將所述尾部墻體的輪廓點云數據進行直線擬合,得到擬合直線;
30、根據所述擬合直線的斜率生成所述墻面作業機器人的姿態調整參數;
31、根據所述車體坐標系的原點到所述擬合直線的直線距離生成所述墻面作業機器人的位置移動參數。
32、在其中一些實施例中,所述根據所述擬合直線的斜率生成所述墻面作業機器人的姿態調整參數,包括:
33、在所述擬合直線的斜率為0時,確定所述墻面作業機器人平行于墻面,所述墻面作業機器人直接進行作業;
34、在所述擬合直線的斜率不為0時,根據所述擬合直線的斜率的數值生成所述墻面作業機器人原地旋轉的角度值,其中,所述墻面作業機器人按照所述原地旋轉的角度值原地旋轉之后進行作業。
35、在其中一些實施例中,所述根據所述車體坐標系的原點到所述擬合直線的直線距離生成所述墻面作業機器人的位置移動參數,包括:
36、在所述車體坐標系的原點到所述擬合直線的直線距離小于所述作業裝置距墻面的作業距離時,生成第一位置移動參數,其中,所述第一位置移動參數用于指示所述墻面作業機器人后退;
37、在所述車體坐標系的原點到所述擬合直線的直線距離大于所述作業裝置距墻面的作業距離時,生成第二位置移動參數,其中,所述第二位置移動參數用于指示所述墻面作業機器人前進;
38、在所述車體坐標系的原點到所述擬合直線的直線距離等于所述作業裝置距墻面的作業距離時,控制所述墻面作業機器人位置不移動。
39、第三方面,本技術實施例提供了一種計算機設備,包括存儲器、處理器以及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時實現如上述第二方面所述的用于墻面作業機器人的定位導航方法。
40、第四方面,本技術實施例提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如上述第二方面所述的用于墻面作業機器人的定位導航方法。
41、本技術采用以上技術方案,與現有技術相比,本技術實施例提供的墻面作業機器人,包括移動平臺以及設置在所述移動平臺上的激光雷達、工控機和作業裝置,其中,所述激光雷達用于采集墻面輪廓點云數據,所述激光雷達包括設置在所述移動平臺對角位置的第一激光雷達和第二激光雷達,所述第一激光雷達與所述第二激光雷達的采集范圍覆蓋360度;所述工控機用于根據所述激光雷達采集的所述輪廓點云數據生成控制指令,所述控制指令用于指示所述墻面作業機器人的姿態調整參數和位置移動參數;所述作業裝置用于按照所述控制指令進行作業,通過激光雷達全方位采集墻面輪廓點云數據,并根據輪廓點云數據調整墻面作業機器人的姿態和位置,以滿足作業裝置進行墻面作業,解決了相關技術中的墻面自動化作業的機器人需要構建指定格式圖紙導致的處理過程耗時復雜,工作效率低的問題,實現了快速實現墻面的自動化測量或者噴涂打磨等作業,同時操作簡單、不需要外置設備。
42、本技術的一個或多個實施例的細節在以下附圖和描述中提出,以使本技術的其他特征、目的和優點更加簡明易懂。
- 還沒有人留言評論。精彩留言會獲得點贊!