一種老年康復(fù)護(hù)理服務(wù)機(jī)器人的制作方法
本發(fā)明涉及康復(fù)管理,具體涉及一種老年康復(fù)護(hù)理服務(wù)機(jī)器人。
背景技術(shù):
1、近年來,隨著社會經(jīng)濟(jì)水平的快速進(jìn)步和城市化進(jìn)程的加快以及人口老齡化的增長,醫(yī)院收治老年用戶人數(shù)不斷增多,因此不斷提升醫(yī)療服務(wù)水平以滿足老年用戶對護(hù)理服務(wù)的需求是當(dāng)前急需解決的重要問題之一。同時隨著科技技術(shù)的發(fā)展,用于老年康復(fù)護(hù)理服務(wù)的各類護(hù)理機(jī)器人也由此誕生。
2、現(xiàn)有技術(shù)中的護(hù)理機(jī)器人,通過設(shè)定一些固定的程序和康復(fù)方案,能夠?qū)τ脩暨M(jìn)行一些指定的輔助服務(wù);但由于現(xiàn)有技術(shù)中的護(hù)理機(jī)器人不能根據(jù)用戶身體的具體情況進(jìn)行細(xì)節(jié)上的調(diào)整,僅能進(jìn)行固定康復(fù)方案的執(zhí)行,使得康復(fù)護(hù)理服務(wù)質(zhì)量較低,適應(yīng)性差。
3、綜上所述,如何解決現(xiàn)有技術(shù)中的護(hù)理機(jī)器人不能根據(jù)用戶身體的具體情況進(jìn)行細(xì)節(jié)上的調(diào)整,僅能進(jìn)行固定康復(fù)方案的執(zhí)行,使得康復(fù)護(hù)理服務(wù)質(zhì)量較低,適應(yīng)性差的問題已經(jīng)成為目前本領(lǐng)域亟需解決的難題。因此,有必要提出一種具有綜合性和針對性的老年康復(fù)護(hù)理服務(wù)機(jī)器人。
技術(shù)實現(xiàn)思路
1、為解決上述問題,本發(fā)明提供一種老年康復(fù)護(hù)理服務(wù)機(jī)器人,通過護(hù)理組件的設(shè)計,能夠根據(jù)用戶的身體情況以及某些個人特征,利用氣體對用戶提供個性化的支撐,在用戶在運動過程中,通過檢測氣壓變化,分析用戶肢體的康復(fù)情況,實時調(diào)節(jié)對用戶的支撐力度和包裹情況。
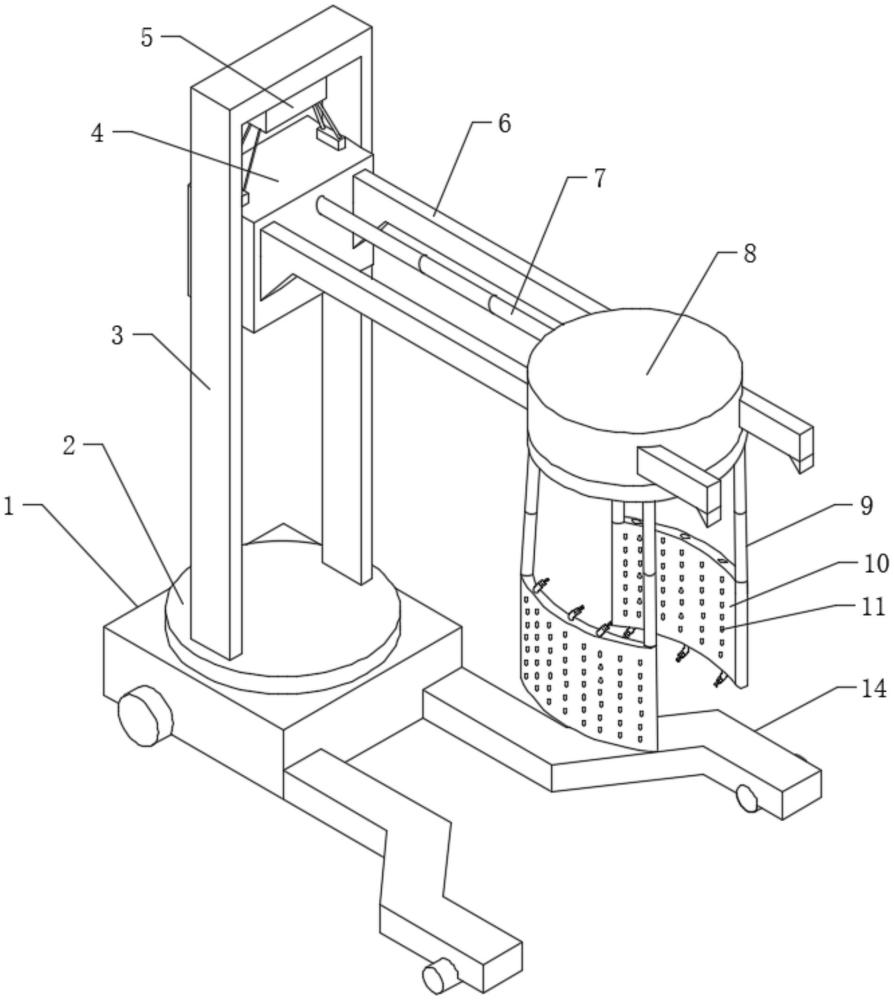
2、為了實現(xiàn)上述目的,本發(fā)明的技術(shù)方案如下:一種老年康復(fù)護(hù)理服務(wù)機(jī)器人,包括用于輔助用戶移動的移動組件、用于調(diào)節(jié)護(hù)理體位的調(diào)節(jié)組件和若干用于對用戶進(jìn)行護(hù)理的護(hù)理組件。
3、護(hù)理組件包括柔性的包裹層,包裹層側(cè)壁開有若干通孔,通孔內(nèi)均滑動配合有活塞,活塞呈“工”字型;通孔兩側(cè)均固定連接有彈性囊,活塞兩側(cè)分別位于與其相鄰的彈性囊內(nèi)且與彈性囊均滑動配合;活塞其中一側(cè)均固定連接有應(yīng)變片,活塞另一側(cè)均嵌入安裝有氣壓傳感器;嵌入安裝有氣壓傳感器的彈性囊均連通有氣路系統(tǒng)。
4、包裹層沿其側(cè)壁上均固定連接有若干接頭和開有若干接口,相鄰包裹層之間的接頭和接口可拆卸連接;包裹層自身各側(cè)壁的接頭與接口也可拆卸連接。
5、控制器用于控制氣路系統(tǒng)向與其連通的彈性囊內(nèi)輸送氣體;控制器還用于接收應(yīng)變片和氣壓傳感器的應(yīng)變信號和氣壓信號,根據(jù)應(yīng)變信號和氣壓信號,分析用戶的體態(tài)和各個部位受力情況。
6、上述方案的技術(shù)原理如下:
7、根據(jù)用戶所需包裹的位置,通過氣路系統(tǒng)向與其連通的彈性囊內(nèi)輸送一定量的氣體,通過氣壓傳感器監(jiān)測此時與其連通的彈性囊內(nèi)的氣壓。再根據(jù)用戶的康復(fù)訓(xùn)練內(nèi)容,將包裹層包裹于用戶的手臂、腿部、腰部或臀部的其中一處或多處,包裹完成后將包裹層的接頭和接口卡合固定。當(dāng)用戶肢體與各個彈性囊接觸后,通過氣壓傳感器監(jiān)測各個彈性囊內(nèi)的氣壓,通過應(yīng)變片檢測此時各處的應(yīng)變信號;根據(jù)氣壓變化和應(yīng)變信號變化判斷包裹層是否與用戶所需包裹的部位包裹嚴(yán)實,然后通過氣路系統(tǒng)向與其連通的彈性囊內(nèi)再次輸送一定量的氣體,使得包裹層與用戶肢體包裹嚴(yán)實。
8、采用上述方案有以下有益效果:
9、1、本發(fā)明通過柔性的包裹層的設(shè)計,使得包裹層在對用戶進(jìn)行包裹時,能夠適應(yīng)不同體型的用戶;同時也可根據(jù)用戶所需包裹的肢體情況,進(jìn)行不同形狀和位置的包裹;可作用于患者的手臂、腿部、腰部以及臀部等各個位置;更全面的滿足用戶的需求。
10、2、本發(fā)明通過彈性囊和包裹層的設(shè)計,能夠利用氣體對患者進(jìn)行柔性的包裹和支撐,大幅度提高了支撐的舒適性和穩(wěn)定性,且在康復(fù)訓(xùn)練的過程中,通過應(yīng)變片和氣壓傳感器的設(shè)計,實時監(jiān)測氣壓和應(yīng)變信號的波動情況,進(jìn)而分析用戶肢體與彈性囊的接觸情況和著力情況,根據(jù)各個著力點分析包裹層對用戶的支撐力度和包裹情況是否適宜,從而通過調(diào)節(jié)彈性囊中的氣體量,進(jìn)而調(diào)節(jié)支撐力和包裹性。
11、3、本發(fā)明相較于現(xiàn)有技術(shù)中程序化的護(hù)理方案,本發(fā)明能夠動態(tài)調(diào)節(jié)包裹程度和支撐力度,通過個性化的包裹調(diào)節(jié)和支撐調(diào)節(jié),大幅度增強(qiáng)了用戶的舒適度,有效提高了患者的康復(fù)效果,滿足了不同用戶的身體條件和康復(fù)需求。
12、4、現(xiàn)有康復(fù)護(hù)理技術(shù)中,往往通過拐杖、機(jī)械手臂或機(jī)械腿來輔助患者進(jìn)行移動,從而實現(xiàn)康復(fù)訓(xùn)練,但這類裝置均使用機(jī)械性的結(jié)構(gòu)對患者的肢體進(jìn)行支撐,對患者肢體的壓迫性較強(qiáng),長時間使用容易使得患者肢體與這類裝置的接觸部位形成壓痕,甚至造成壓破性瘀傷,其舒適性差,不易長期使用;本發(fā)明相較于現(xiàn)有技術(shù),其通過柔性的彈性囊對患者肢體進(jìn)行支撐,根據(jù)患者的肢體情況和康復(fù)訓(xùn)練的情況對包裹力度進(jìn)行實時調(diào)節(jié),適用性強(qiáng),避免了患者由于長時間穿戴而出現(xiàn)壓痕和瘀傷的情況,安全性高。
13、5、現(xiàn)有康復(fù)護(hù)理技術(shù)中,對患者不同位置進(jìn)行康復(fù)訓(xùn)練時,往往需要更換不同的設(shè)備,進(jìn)而導(dǎo)致康復(fù)護(hù)理的成本大大提升;相較于現(xiàn)有技術(shù),本發(fā)明利用包裹層的設(shè)計,能夠?qū)颊卟煌恢眠M(jìn)行包裹和支撐,再配合包裹層的位置、高度和方向的自由調(diào)節(jié),即可實現(xiàn)不同的康復(fù)訓(xùn)練內(nèi)容,從而提高了裝置的全面性,大幅度降低了康復(fù)護(hù)理的成本。
14、進(jìn)一步,移動組件包括底座,底座底部嵌入安裝有若干遙控輪;控制器用于控制遙控輪的移動。
15、有益效果:通過控制器控制遙控輪的移動,進(jìn)而能夠帶動裝置整體進(jìn)行移動,為后續(xù)用戶進(jìn)行康復(fù)訓(xùn)練和位置移動提供了良好的基礎(chǔ)。
16、進(jìn)一步,調(diào)節(jié)組件包括豎向固定連接于底座內(nèi)的第一驅(qū)動件;第一驅(qū)動件輸出軸同軸固定連接有轉(zhuǎn)動臺,轉(zhuǎn)動臺頂部固定連接有框型的支架,支架內(nèi)頂壁固定連接有卷揚機(jī),卷揚機(jī)內(nèi)纏繞有若干鋼索;支架內(nèi)側(cè)壁滑動配合有支撐座;支撐座頂部與鋼索遠(yuǎn)離卷揚機(jī)的一端均固定連接;支撐座側(cè)壁對稱固定連接有支撐桿;支撐座側(cè)壁還固定連接有電控缸;電控缸輸出軸固定連接有滑動盤,支撐桿均貫穿滑動盤且均與滑動盤滑動配合;滑動盤底部固定連接有第二驅(qū)動件,第二驅(qū)動件輸出軸同軸固定連接有轉(zhuǎn)盤;轉(zhuǎn)盤底部鉸接有若干伸縮桿;相鄰伸縮桿之間均與與其相鄰的包裹層側(cè)壁可拆卸連接;控制器用于控制第一驅(qū)動件、第二驅(qū)動件和卷揚機(jī)的啟閉。
17、有益效果:通過控制器調(diào)節(jié)轉(zhuǎn)動臺轉(zhuǎn)動,能夠有效調(diào)節(jié)包裹層的方向;通過控制器調(diào)節(jié)卷揚機(jī)的收放,能夠有效調(diào)節(jié)包裹層的高度;通過控制器控制電控缸的伸縮,能夠有效調(diào)節(jié)包裹層的水平位置;通過轉(zhuǎn)盤的設(shè)計,使得包裹層能夠自轉(zhuǎn),從而便于用戶在康復(fù)訓(xùn)練時轉(zhuǎn)換方向,在搬運用戶時能夠從各個角度將包裹層安裝在用戶的肢體上。
18、進(jìn)一步,底座一側(cè)對稱固定連接有折線型的折線架,折線架底部嵌入安裝有隨動輪。
19、有益效果:折線架能夠大幅度增加底部長度和重量,提高裝置運行的穩(wěn)定性;折線型的設(shè)計能夠增大用戶底部的運動空間,避免影響用戶的腳部活動范圍;折線架底部的隨動輪能夠有效提高裝置移動時的穩(wěn)定性。
20、進(jìn)一步,支撐桿與支撐座連接處均固定連接有三角塊。
21、有益效果:三角塊能夠增加支撐桿與支撐座之間的連接穩(wěn)定性,使得支撐桿提供更好的支撐性能。
22、進(jìn)一步,包裹層內(nèi)壁嵌入安裝有若干支撐條,支撐條選用彈性樹脂材料。
23、有益效果:支撐條能夠使得包裹層在包裹過程中保持用戶所需的形態(tài),避免包裹層由于其自身的柔軟性而產(chǎn)生變形。
24、進(jìn)一步,轉(zhuǎn)盤底部固定連接有攝像頭,控制器用于通過攝像頭識別用戶的運動圖像,基于用戶的運動圖像分析用戶的運動軌跡和運動安全性,根據(jù)運動軌跡計算用戶的運動步數(shù)。
25、有益效果:控制器能夠通過攝像頭采集用戶的運動圖像,進(jìn)而了解用戶的運動情況。
26、進(jìn)一步,所述老年康復(fù)護(hù)理服務(wù)機(jī)器人用于輔助用戶進(jìn)行康復(fù)訓(xùn)練,其使用方法如下:
27、s1,位置調(diào)節(jié):根據(jù)用戶的身高,調(diào)節(jié)包裹層的高度,根據(jù)用戶所處的位置,調(diào)節(jié)滑動盤的位置,將滑動盤移動至用戶正上方。
28、s2,包裹層安裝:通過氣路系統(tǒng)根據(jù)用戶的體重向與其連通的彈性囊內(nèi)輸送氣體,并通過氣壓傳感器監(jiān)測此時與其連通的彈性囊內(nèi)的氣壓,記錄為基礎(chǔ)氣壓;根據(jù)用戶的康復(fù)訓(xùn)練內(nèi)容,將包裹層包裹于用戶的手臂、腿部、腰部或臀部的其中一處或多處,包裹完成后將包裹層的接頭和接口卡合固定。
29、當(dāng)用戶肢體與各個彈性囊接觸后,將此時各個氣壓傳感器監(jiān)測的氣壓均記錄為第一氣壓,根據(jù)應(yīng)變片的應(yīng)變信號結(jié)合第一氣壓,分析用戶肢體與各個彈性囊的接觸情況,判斷包裹層是否與用戶所需包裹的部位包裹嚴(yán)實;根據(jù)用戶所需包裹的位置以及用戶肢體的大小,對彈性囊內(nèi)進(jìn)行氣量調(diào)整,以應(yīng)變片的應(yīng)變信號的變化為依據(jù),使各個位置的彈性囊根據(jù)用戶所需包裹的位置以及用戶肢體的特征對用戶肢體進(jìn)行包裹,此時,將此時調(diào)整后的氣量記錄為第二氣量,將各個氣壓傳感器監(jiān)測的氣壓均記錄為第二氣壓。
30、s3,運動監(jiān)測:包裹層安裝完成后,根據(jù)用戶所需的康復(fù)訓(xùn)練對用戶進(jìn)行運動輔助;當(dāng)用戶需要進(jìn)行移動時,則控制遙控輪啟動,并調(diào)節(jié)至用戶所需的移動速度;在此過程中,將各個氣壓傳感器監(jiān)測的氣壓均記錄為第三氣壓;根據(jù)第三氣壓的變化情況分析用戶在運動過程中肢體與各個彈性囊的接觸情況和著力大小,根據(jù)用戶在運動過程中肢體與各個彈性囊的接觸情況和著力大小分析用戶肢體的康復(fù)情況;根據(jù)用戶的康復(fù)情況,通過氣路系統(tǒng)向用戶肢體康復(fù)情況差的部位的彈性囊補(bǔ)充氣體,將此時的氣體記為第三氣量。
31、有益效果:通過根據(jù)用戶的身高和位置調(diào)節(jié)包裹層的高度和滑動盤的位置,確保了裝置能夠針對每個用戶的身體特征進(jìn)行個性化的設(shè)置,提高了康復(fù)訓(xùn)練的精準(zhǔn)度。在包裹層安裝過程中,通過監(jiān)測氣壓和應(yīng)變信號,結(jié)合用戶肢體的特征,對彈性囊內(nèi)的氣量進(jìn)行精確調(diào)整,實現(xiàn)了對用戶肢體的緊密包裹和個性化支撐,進(jìn)一步提升了康復(fù)效果。在運動監(jiān)測階段,實時監(jiān)測用戶肢體的氣壓變化,從而分析用戶在運動過程中與彈性囊的接觸情況和著力大小,進(jìn)而判斷用戶肢體的康復(fù)情況。根據(jù)監(jiān)測結(jié)果,動態(tài)調(diào)整對用戶肢體的支撐力度,對康復(fù)情況差的部位進(jìn)行額外的氣體補(bǔ)充,實現(xiàn)了康復(fù)訓(xùn)練的動態(tài)優(yōu)化。
32、進(jìn)一步,s2中,根據(jù)用戶的體重提前設(shè)定初始輸入的氣量,并將其記錄為基礎(chǔ)氣量。
33、有益效果:基礎(chǔ)氣量的設(shè)計能夠在包裹層包裹用戶的第一時間即可為用戶提供有效支撐。
34、進(jìn)一步,所述老年康復(fù)護(hù)理服務(wù)機(jī)器人還用于輔助用戶進(jìn)行位置轉(zhuǎn)移,其使用方法如下:
35、s1,裝置移動:根據(jù)用戶所處的位置,控制遙控輪移動至用戶位置;調(diào)節(jié)滑動盤的位置,將滑動盤移動至用戶正上方;控制卷揚機(jī)下放鋼索,將包裹層下降至用戶所在高度。
36、s2,包裹層安裝:根據(jù)用戶的體重,通過氣路系統(tǒng)向與其連通的彈性囊內(nèi)輸送基礎(chǔ)氣量的氣體;根據(jù)用戶的身體情況,將包裹層包裹于用戶的手臂、腿部、腰部或臀部的其中一處或多處,包裹完成后將包裹層的接頭和接口卡合固定。
37、s3,用戶轉(zhuǎn)移:將用戶包裹后,控制卷揚機(jī)收起鋼索,將包裹層上升至離地0.8-1.3m;調(diào)節(jié)滑動盤的位置,將用戶調(diào)整至面向移動方向;控制遙控輪移動至指定位置,到達(dá)指定位置后,控制卷揚機(jī)下放鋼索,將包裹層下降至指定位置;當(dāng)最下方彈性囊與指定位置接觸時,通過氣壓傳感器監(jiān)測此時的氣壓,記錄為接觸氣壓;達(dá)到接觸氣壓時,降低卷揚機(jī)下放鋼索的速度,當(dāng)用戶轉(zhuǎn)移完成后,控制卷揚機(jī)停止運行,解除包裹層。
38、有益效果:在用戶轉(zhuǎn)移過程中,通過氣壓傳感器實時監(jiān)測彈性囊與指定位置的接觸情況,當(dāng)達(dá)到接觸氣壓時,降低卷揚機(jī)下放鋼索的速度,以確保用戶平穩(wěn)著陸。從而實現(xiàn)智能化的動態(tài)調(diào)整功能,進(jìn)一步提升了用戶轉(zhuǎn)移的安全性和穩(wěn)定性。
39、本發(fā)明的附加方面和優(yōu)點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發(fā)明的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!