機器人雙臂手眼動態自適應標定方法及裝置與流程
本發明涉及機器人控制的,尤其涉及一種機器人雙臂手眼動態自適應標定方法及裝置。
背景技術:
1、機器人手眼標定技術是機器人視覺引導與自主操作的核心基礎,其目標是通過建立攝像頭坐標系與機械臂坐標系之間的精確映射關系,實現基于視覺信息的精準運動控制。傳統手眼標定方法通常基于靜態標定板,通過控制機械臂執行固定次數的平移與旋轉運動,利用標定板角點在圖像中的位置變化,結合opencv等開源庫的標定函數解算旋轉矩陣與平移向量。然而,這類方法存在顯著局限性。
2、環境敏感性問題:傳統方法假設標定環境光照均勻且無遮擋,實際應用中光照突變或異物遮擋易導致標定板角點檢測失效,進而影響標定精度。
3、機械臂運動誤差依賴性:標定精度高度依賴機械臂的理論運動軌跡精度,而實際運動中的微小振動或軌跡偏差會引入系統性誤差,尤其在雙臂協同場景下,誤差累積效應更為明顯。
4、靜態標定適應性不足:現有方法缺乏動態環境感知與實時調整能力,無法應對標定過程中環境干擾或機械臂位姿偏差,需多次重復標定以修正參數,效率低下。
5、如何妥善的解決上述問題,就成為了業界亟待解決的課題。
技術實現思路
1、本發明提供一種機器人雙臂手眼動態自適應標定方法及裝置,用以通過動態環境感知與振動補償實時修正位姿,結合閉環重投影誤差優化及螺旋/網格路徑規劃,實現高精度機器人雙臂手眼標定。
2、根據本發明的第一方面,提供一種機器人雙臂手眼動態自適應標定方法,該機器人雙臂手眼動態自適應標定方法包括:
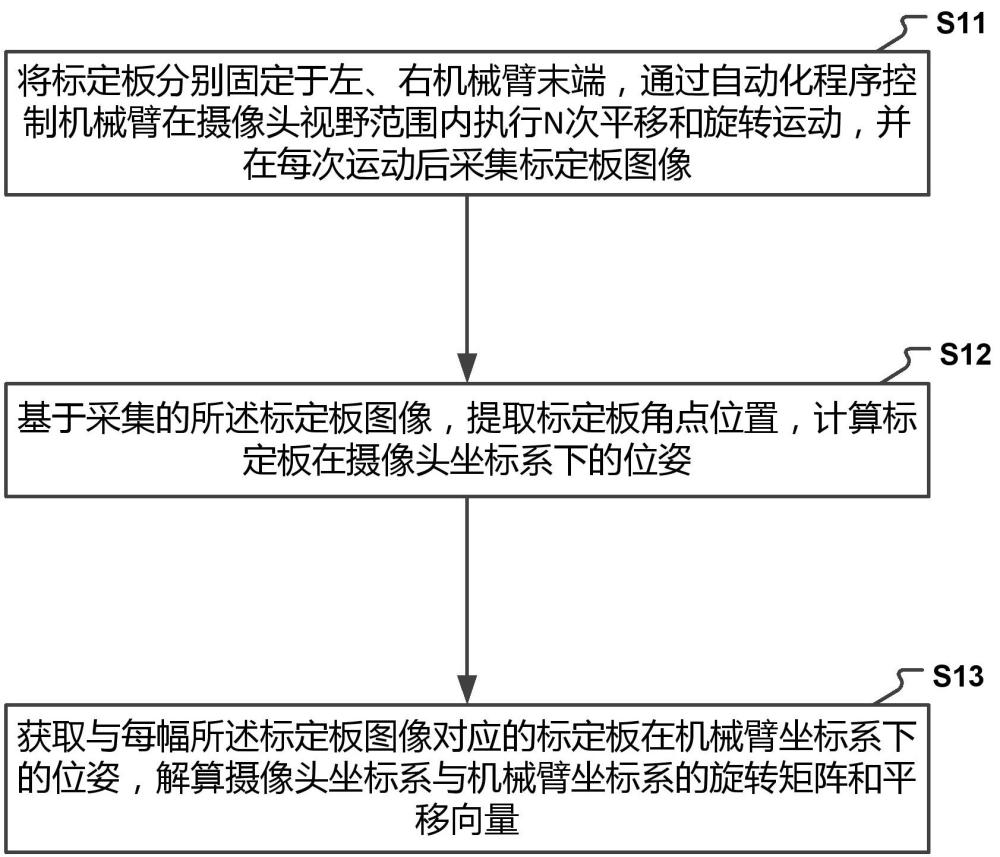
3、將標定板分別固定于左、右機械臂末端,通過自動化程序控制機械臂在攝像頭視野范圍內執行n次平移和旋轉運動,并在每次運動后采集標定板圖像;
4、基于采集的所述標定板圖像,提取標定板角點位置,計算標定板在攝像頭坐標系下的位姿;
5、獲取與每幅所述標定板圖像對應的標定板在機械臂坐標系下的位姿,解算攝像頭坐標系與機械臂坐標系的旋轉矩陣和平移向量。
6、在一個實施例中,還包括:
7、通過光照傳感器和深度相機實時監測環境參數,若檢測到光照強度突變或遮擋物干擾,則動態調整機械臂的移動路徑;
8、基于深度相機獲取的遮擋物位置數據,生成避障路徑;
9、根據光照傳感器數據,調整機械臂末端標定板的角度,以優化圖像采集的光照條件;
10、通過機械臂逆運動學算法生成新的目標位姿,并執行所述移動路徑。
11、在一個實施例中,還包括:
12、實時計算重投影誤差,若所述重投影誤差超過預設閾值,則暫停標定并重新移動機械臂;
13、在每次標定位姿后,調用opencv的projectpoints函數計算重投影誤差;
14、若所述重投影誤差超過所述預設閾值,則觸發機械臂返回上一標定位姿;
15、基于誤差分布重新規劃機械臂運動軌跡,確保標定板在后續步驟中處于高精度成像區域。
16、在一個實施例中,還包括:
17、通過安裝在機械臂末端的慣性測量單元,實時采集機械臂運動過程中的振動加速度和角速度數據;
18、基于所述振動加速度和角速度數據,計算標定板在圖像采集瞬間的瞬時位姿偏移量;
19、將所述瞬時位姿偏移量補償至標定板在攝像頭坐標系下的位姿計算結果中,生成修正后的位姿數據;
20、將修正后的位姿數據輸入所述calibratehandeye函數,優化所述旋轉矩陣和平移向量。
21、在一個實施例中,所述通過opencv庫的calibratecamera函數提取標定板角點位置,包括:
22、通過opencv的findchessboardcorners函數檢測標定板角點;
23、通過亞像素級優化算法(cornersubpix函數)提升角點坐標精度;
24、對左右機械臂的標定板角點數據分別進行畸變校正,生成標準化輸入數據。
25、在一個實施例中,所述機械臂運動軌跡規劃,包括:
26、采用螺旋形或網格狀路徑覆蓋攝像頭視野的多個區域;
27、在每次運動后驗證標定板是否完整成像,若未檢測到完整角點則重新執行當前運動位姿。
28、根據本發明的第二方面,提供一種機器人雙臂手眼動態自適應標定裝置,包括:
29、采集模塊,用于將標定板分別固定于左、右機械臂末端,通過自動化程序控制機械臂在攝像頭視野范圍內執行n次平移和旋轉運動,并在每次運動后采集標定板圖像;
30、計算模塊,用于基于采集的所述標定板圖像,提取標定板角點位置,計算標定板在攝像頭坐標系下的位姿;
31、轉化模塊,用于獲取與每幅所述標定板圖像對應的標定板在機械臂坐標系下的位姿,解算攝像頭坐標系與機械臂坐標系的旋轉矩陣和平移向量。
32、在一個實施例中,所述采集模塊、所述計算模塊和所述轉化模塊被控制執行實現上述的任一種機器人雙臂手眼動態自適應標定方法。
33、根據本發明的第三方面,提供一種電子設備,電子設備包括:通信接口,處理器,存儲器;
34、其中,所述存儲器用于存儲程序指令,所述程序指令當被通過所述通信接口與所述存儲器通信連接的所述處理器執行時實現上述的任一種機器人雙臂手眼動態自適應標定方法。
35、根據本發明的第四方面,提供一種計算機可讀存儲介質,計算機可讀存儲介質上存儲有計算機程序指令,計算機程序指令被計算機(例如,計算機中的處理器)執行時實現上述的任一種機器人雙臂手眼動態自適應標定方法。
36、綜上所述,本發明提供一種機器人雙臂手眼動態自適應標定方法及裝置,該方法包括:將標定板分別固定于左、右機械臂末端,通過自動化程序控制機械臂在攝像頭視野范圍內執行n次平移和旋轉運動,并在每次運動后采集標定板圖像;基于采集的所述標定板圖像,提取標定板角點位置,計算標定板在攝像頭坐標系下的位姿;獲取與每幅所述標定板圖像對應的標定板在機械臂坐標系下的位姿,解算攝像頭坐標系與機械臂坐標系的旋轉矩陣和平移向量。本技術的技術方案通過多傳感器融合與動態閉環優化機制,顯著提升了機器人雙臂手眼標定的精度、效率與魯棒性:基于慣性測量單元imu實時采集機械臂振動數據,結合標定板瞬時位姿偏移量補償技術,消除微振動導致的系統性誤差,將標定精度提升至亞像素級;同時,融合光照傳感器與深度相機數據,動態感知環境光照突變或遮擋干擾,通過避障路徑規劃與機械臂角度自適應調整,確保標定板始終處于最佳成像區域,降低環境干擾導致的標定失敗率;進一步引入重投影誤差實時監測與閾值觸發機制,優化螺旋形/網格狀運動軌跡,結合標定板成像完整性驗證,形成“感知-調整-驗證”閉環流程,標定成功率提升顯著;此外,兼容opencv標準庫與多類型機械臂硬件,無需復雜改造即可適配工業自動化、醫療機器人等高精度場景,具備廣泛的工程普適性。
37、本發明的其它特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發明而了解。本發明的目的和其他優點可通過在所寫的說明書和附圖中所特別指出的結構來實現和獲得。
38、下面通過附圖和實施例,對本發明的技術方案做進一步的詳細描述。
- 還沒有人留言評論。精彩留言會獲得點贊!