一種旋轉框架焊接機器人專用工裝的制作方法
本技術屬于焊接,尤其是涉及一種旋轉框架焊接機器人專用工裝。
背景技術:
1、本實用新型所加工的工件包括面板和兩個連接板,兩個連接板插接在面板的同側端,并將連接板與面板的交接處進行焊接,完成工件的加工。
2、現有技術采用人工焊接的加工方法,但是該種方法有已下缺陷:
3、1、面板一端水平設置,另一端向下彎曲,連接板插接在面板的水平端,在加工時,因面板另一端彎曲,且連接板也占據一定高度,使整體面板無法水平放置,而人工在焊接時易產生不規則焊縫、錯位或未焊透等質量問題,無法保證工件外觀的整潔,降低焊接品質;
4、2、人工生產成本較高,且操作人員需要經過培訓和技能訓練才可上崗操作,在焊接過程中,存在一定危險性,如火花飛濺、氧氣泄漏等,若操作不當,則會造成安全事故;
5、且焊接工作通常需在高溫、高壓、有毒氣體環境下進行,對操作者的身體健康有一定的危害。
技術實現思路
1、本實用新型的目的在于克服現有技術的缺點,提供一種旋轉框架焊接機器人專用工裝,能夠與焊接機器人相聯動,替代傳統加工方法,保證焊接尺寸質量和焊道尺寸的一致性,防止工件變形,減輕操作者的勞動強度。
2、為解決上述技術問題,本實用新型采用的技術方案是:一種旋轉框架焊接機器人專用工裝,包括框架和可拆卸在所述框架上的定位機構;
3、所述框架通過兩側的支撐座與外部驅動裝置相連,使所述框架可軸向轉動;
4、所述定位機構包括夾具體、底座架和連接在所述底座架中央的中心座,兩個所述夾具體相對移動在所述中心座的兩側,工件被裝夾在兩個所述夾具體之間,所述中心座與所述框架的橫向中心線共線設置。
5、進一步的,在所述框架內橫向連接有支撐梁,在所述支撐梁上可拆卸連接有定位板,用于對工件的端部進行抵擋。
6、進一步的,所述定位機構包括兩個分別轉動在所述底座架內兩側的絲杠,兩個所述夾具體下端的連接部分別與所對應的絲杠螺紋相連。
7、進一步的,兩個所述絲杠的螺紋相反,兩個所述絲杠相臨的端部均通過絲杠接套匯集在所述中心座內。
8、進一步的,所述絲杠接套套設在所述中心座內,在所述絲杠接套的外部環繞設有與所述中心座內腔凸起相對應的凹槽,兩個所述絲杠的端部分別與所述絲杠接套內腔的兩端通過定位銷相連。
9、進一步的,在所述底座架的兩側壁均設有滑動槽,所述夾具體的兩端均向下延伸卡合在所述底座架的兩側,在所述夾具體兩端的下部均連接有滑板,所述滑板卡合在所述滑動槽的上壁,使所述夾具體沿所述滑動槽滑動。
10、進一步的,在所述中心座的上端設有與內腔相連通的進油孔。
11、進一步的,在所述夾具體側端的夾持板上設置有摩擦墊。
12、進一步的,在所述支撐座的兩側均設有與所述外部驅動裝置中夾緊臂相配合的錐形孔。
13、進一步的,所述定位機構至少設置有兩個,用于對工件的分段固定。
14、本實用新型具有的優點和積極效果是:
15、1、由于采用上述技術方案,通過多個定位機構的設置,可對工件分段固定,防止工件跑動及變形,底座架連接在框架的上端,為面板向下彎曲的端部留有空間,使工件平放在框架上方,定位板可抵住面板的端部,實現進一步的定位,防止面板傾斜;
16、且底座架和定位板均可通過螺栓可拆卸連接在框架上,增大其適配性,可根據工件的長度自行調整。
17、2、定位機構中,中心座的設置是作為兩個夾具體相對移動的參照基準,可使工件始終被固定在框架的中心,并通過外部驅動裝置使工件軸向轉動,兩個絲杠通過絲杠接套相連接,實現兩個相反螺紋絲杠的共同轉動,驅動兩個夾具體同步移動,中心座上進油孔的設置,可使絲杠接套在中心座的滑動更加順暢、不卡頓。
18、3、框架通過支撐座與外部驅動裝置相連,并與焊接機器人相聯動,通過采用焊接機器人焊接;
19、可降低操作者的工作強度和生產成本,焊接機器人可連續工作并保證焊接質量的統一與穩定;
20、可提高操作安全性,避免人工焊接不當產生安全事故;
21、改善工作環境,焊接機器人可在封閉的區域工作,避免操作者接觸到焊接過程中產生的有害氣體、噪音和輻射等。
技術特征:
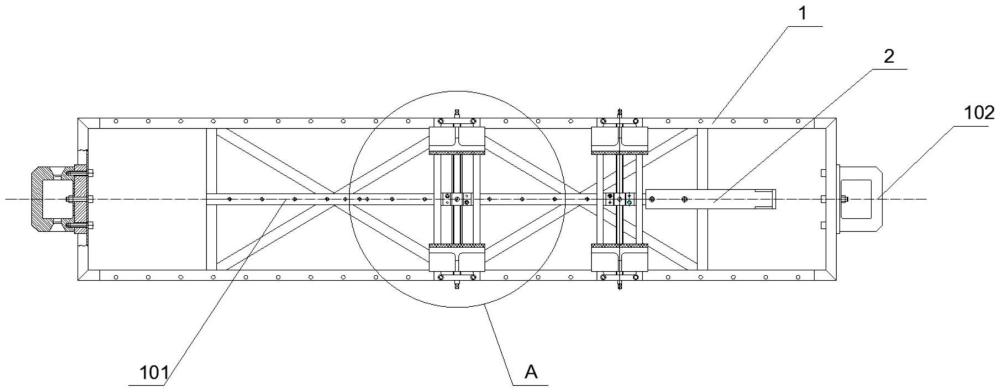
1.一種旋轉框架焊接機器人專用工裝,其特征在于:包括框架(1)和可拆卸在所述框架(1)上的定位機構;
2.根據權利要求1所述的一種旋轉框架焊接機器人專用工裝,其特征在于:在所述框架(1)內橫向連接有支撐梁(101),在所述支撐梁(101)上可拆卸連接有定位板(2),用于對工件的端部進行抵擋。
3.根據權利要求1所述的一種旋轉框架焊接機器人專用工裝,其特征在于:所述定位機構包括兩個分別轉動在所述底座架(3)內兩側的絲杠(7),兩個所述夾具體(4)下端的連接部(43)分別與所對應的絲杠(7)螺紋相連。
4.根據權利要求3所述的一種旋轉框架焊接機器人專用工裝,其特征在于:兩個所述絲杠的螺紋相反,兩個所述絲杠相臨的端部均通過絲杠接套(10)匯集在所述中心座(8)內。
5.根據權利要求4所述的一種旋轉框架焊接機器人專用工裝,其特征在于:所述絲杠接套(10)套設在所述中心座(8)內,在所述絲杠接套(10)的外部環繞設有與所述中心座(8)內腔凸起相對應的凹槽,兩個所述絲杠的端部分別與所述絲杠接套(10)內腔的兩端通過定位銷相連。
6.根據權利要求3所述的一種旋轉框架焊接機器人專用工裝,其特征在于:在所述底座架(3)的兩側壁均設有滑動槽(31),所述夾具體(4)的兩端均向下延伸卡合在所述底座架(3)的兩側,在所述夾具體(4)兩端的下部均連接有滑板(9),所述滑板(9)卡合在所述滑動槽(31)的上壁,使所述夾具體(4)沿所述滑動槽(31)滑動。
7.根據權利要求3所述的一種旋轉框架焊接機器人專用工裝,其特征在于:在所述中心座(8)的上端設有與內腔相連通的進油孔(81)。
8.根據權利要求3所述的一種旋轉框架焊接機器人專用工裝,其特征在于:在所述夾具體(4)側端的夾持板(41)上設置有摩擦墊(5)。
9.根據權利要求1所述的一種旋轉框架焊接機器人專用工裝,其特征在于:在所述支撐座(102)的兩側均設有與所述外部驅動裝置中夾緊臂相配合的錐形孔。
10.根據權利要求1所述的一種旋轉框架焊接機器人專用工裝,其特征在于:所述定位機構至少設置有兩個,用于對工件的分段固定。
技術總結
本技術提供一種旋轉框架焊接機器人專用工裝,屬于焊接技術領域,包括框架和可拆卸在所述框架上的定位機構;所述框架通過兩側的支撐座與外部驅動裝置相連,使所述框架可軸向轉動;所述定位機構包括夾具體、底座架和連接在在所述底座架中央的中心座,兩個所述夾具體相對移動在所述中心座的兩側,工件被裝夾在兩個所述夾具體之間,所述中心座與所述框架的橫向中心線共線設置。本技術的有益效果是能夠與焊接機器人相聯動,替代傳統加工方法,保證焊接尺寸質量和焊道尺寸的一致性,防止工件變形,減輕操作者的勞動強度。
技術研發人員:郭永斌,郭逸夫,王家星
受保護的技術使用者:天津泰和晟智能裝備有限公司
技術研發日:20240614
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!