基于視覺定位的停車控制方法、裝置、設備及存儲介質與流程
本發明涉及計算機視覺,尤其涉及一種基于視覺定位的停車控制方法、裝置、設備及存儲介質。
背景技術:
1、目前,常規的agv(automated?guided?vehicle,自動引導車)可以采用磁釘定位、激光掃描定位、光學傳感器定位等定位方法。在使用差速agv進行停車操作時,差速agv車體的轉向和停車都依賴于輪胎與地面之間的摩擦力。因此其停車定位通常會設定一個允許的誤差值范圍。只要檢測到差速agv的定位結果在這個誤差值范圍以內,就認為滿足了停車標準。
2、然而,由于差速agv受輪胎摩擦力和地面光滑程度等外界因素的影響,比如磨損嚴重的輪胎在轉向時,車體的實際轉向角度和預期轉向角度可能會存在差異,因此差速agv的停車精度無法做到很高。實際停車位置可能會超出設定的誤差值范圍,導致停車精度不滿足某些高精度要求的應用場景。
技術實現思路
1、本發明提供一種基于視覺定位的停車控制方法、裝置、設備及存儲介質,用以解決現有技術中所存在的缺陷。
2、本發明提供一種基于視覺定位的停車控制方法,包括:
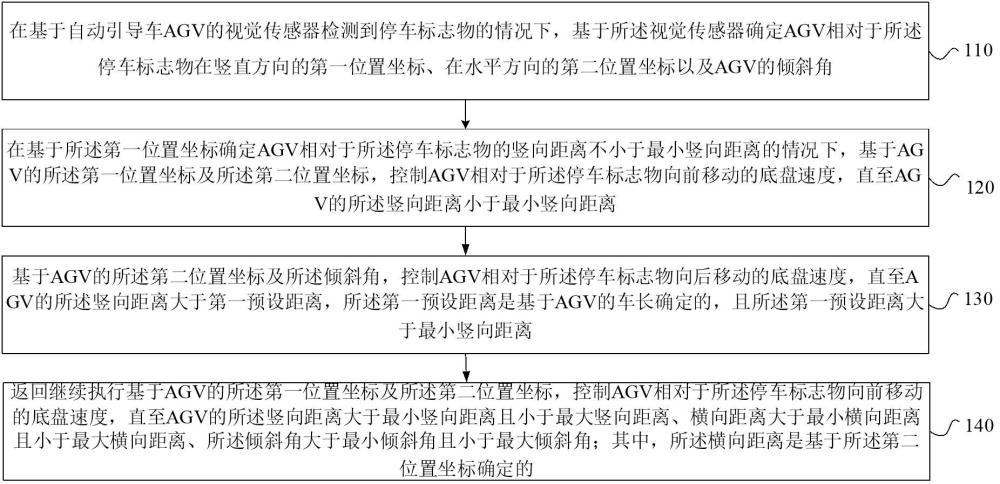
3、在基于自動引導車agv的視覺傳感器檢測到停車標志物的情況下,基于所述視覺傳感器確定agv相對于所述停車標志物在豎直方向的第一位置坐標、在水平方向的第二位置坐標以及agv的傾斜角;
4、在基于所述第一位置坐標確定agv相對于所述停車標志物的豎向距離不小于最小豎向距離的情況下,基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,直至agv的所述豎向距離小于最小豎向距離;
5、基于agv的所述第二位置坐標及所述傾斜角,控制agv相對于所述停車標志物向后移動的底盤速度,直至agv的所述豎向距離大于第一預設距離,所述第一預設距離是基于agv的車長確定的,且所述第一預設距離大于最小豎向距離;
6、返回繼續執行基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,直至agv的所述豎向距離大于最小豎向距離且小于最大豎向距離、橫向距離大于最小橫向距離且小于最大橫向距離、所述傾斜角大于最小傾斜角且小于最大傾斜角;其中,所述橫向距離是基于所述第二位置坐標確定的。
7、根據本發明提供的一種基于視覺定位的停車控制方法,基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,包括:
8、在基于所述第一位置坐標確定agv相對于所述停車標志物的豎向距離大于第一預設距離的情況下,基于agv的所述第一位置坐標、agv的車長及第一線速度正系數,控制agv相對于所述停車標志物向前移動的底盤線速度;以及
9、基于agv的所述第二位置坐標、agv的車長及第一角速度正系數,控制agv相對于所述停車標志物向前移動的底盤角速度。
10、根據本發明提供的一種基于視覺定位的停車控制方法,基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,包括:
11、在基于所述第一位置坐標確定agv相對于所述停車標志物的豎向距離大于第二預設距離,且不大于第一預設距離的情況下,基于agv的所述第一位置坐標、agv的車長及第一線速度正系數,控制agv相對于所述停車標志物向前移動的底盤線速度;其中,所述第二預設距離大于最小豎向距離;以及
12、基于agv的所述第二位置坐標、agv的車長及第二角速度正系數,控制agv相對于所述停車標志物向前移動的底盤角速度;其中,所述第二角度正系數小于第一角度正系數。
13、根據本發明提供的一種基于視覺定位的停車控制方法,基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,包括:
14、在基于所述第一位置坐標確定agv相對于所述停車標志物的豎向距離不小于最小豎向距離,且不大于第二預設距離的情況下,基于agv的所述第一位置坐標、agv的車長及第二線速度正系數,控制agv相對于所述停車標志物向前移動的底盤線速度;其中,所述第二線速度正系數小于第一線速度正系數;以及
15、基于agv的所述第二位置坐標、agv的車長及第三角速度正系數,控制agv相對于所述停車標志物向前移動的底盤角速度;其中,所述第三角速度正系數小于第一角速度正系數,但大于第二角速度正系數。
16、根據本發明提供的一種基于視覺定位的停車控制方法,基于agv的所述第二位置坐標及所述傾斜角,控制agv相對于所述停車標志物向后移動的底盤速度,包括:
17、在基于所述第二位置坐標確定agv相對于所述停車標志物的橫向距離處于預設橫向距離范圍的情況下,基于agv的車長及線速度負系數,控制agv相對于所述停車標志物向后移動的底盤線速度;其中,所述預設橫向距離范圍是基于agv的車長確定的;以及
18、基于agv的車長、agv的所述傾斜角及第四角速度正系數,控制agv相對于所述停車標志物向后移動的底盤角速度。
19、根據本發明提供的一種基于視覺定位的停車控制方法,所述方法還包括:
20、在基于所述第二位置坐標確定agv相對于所述停車標志物的橫向距離不處于預設橫向距離范圍的情況下,基于agv的車長、agv的所述第二位置坐標及第五角速度正系數,控制agv相對于所述停車標志物向前移動的底盤角速度。
21、根據本發明提供的一種基于視覺定位的停車控制方法,所述方法還包括:
22、基于agv的停車空間的尺寸及agv的底盤尺寸,確定停車定位參數;其中,所述停車定位參數包括最小豎向距離、最大豎向距離、最小橫向距離、最大橫向距離、最小傾斜角、最大傾斜角及車長。
23、本發明還提供一種基于視覺定位的停車控制裝置,包括:
24、第一停車控制模塊,用于在基于自動引導車agv的視覺傳感器檢測到停車標志物的情況下,基于所述視覺傳感器確定agv相對于所述停車標志物在豎直方向的第一位置坐標、在水平方向的第二位置坐標以及agv的傾斜角;
25、第二停車控制模塊,用于在基于所述第一位置坐標確定agv相對于所述停車標志物的豎向距離不小于最小豎向距離的情況下,基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,直至agv的所述豎向距離小于最小豎向距離;
26、第三停車控制模塊,用于基于agv的所述第二位置坐標及所述傾斜角,控制agv相對于所述停車標志物向后移動的底盤速度,直至agv的所述豎向距離大于第一預設距離,所述第一預設距離是基于agv的車長確定的,且所述第一預設距離大于最小豎向距離;
27、第四停車控制模塊,用于返回繼續執行基于agv的所述第一位置坐標及所述第二位置坐標,控制agv相對于所述停車標志物向前移動的底盤速度,直至agv的所述豎向距離大于最小豎向距離且小于最大豎向距離、橫向距離大于最小橫向距離且小于最大橫向距離、所述傾斜角大于最小傾斜角且小于最大傾斜角。
28、本發明還提供一種電子設備,包括存儲器、處理器及存儲在存儲器上并可在處理器上運行的計算機程序,所述處理器執行所述程序時實現如上述任一種所述基于視覺定位的停車控制方法。
29、本發明還提供一種非暫態計算機可讀存儲介質,其上存儲有計算機程序,該計算機程序被處理器執行時實現如上述任一種所述基于視覺定位的停車控制方法。
30、本發明還提供一種計算機程序產品,包括計算機程序,所述計算機程序被處理器執行時實現如上述任一種所述基于視覺定位的停車控制方法。
31、本發明提供的基于視覺定位的停車控制方法、裝置、設備及存儲介質,通過利用agv的視覺傳感器精確檢測停車標志物的位置,并實時計算agv相對于停車標志物的第一位置坐標、第二位置坐標以及傾斜角,實現了對agv移動過程的精細控制。該方法能夠在agv的豎向距離不小于最小豎向距離時,根據第一位置坐標及第二位置坐標智能調節底盤向前移動的速度,直至agv接近到豎向距離小于最小豎向距離的位置;隨后,根據第二位置坐標和傾斜角調整底盤向后移動的速度,使agv后退至一個第一預設距離,以確保有足夠的空間進行下一步操作;最后,再次基于第一位置坐標及第二位置坐標控制agv向前移動,直至所有停車參數(豎向距離、橫向距離、傾斜角)均滿足預設的停車條件(即位于相應的最小值和最大值之間),從而實現了提高agv的停車的精準度,減小agv的停車誤差。
- 還沒有人留言評論。精彩留言會獲得點贊!