車輛控制方法、電子設(shè)備、存儲(chǔ)介質(zhì)及程序產(chǎn)品與流程
本申請(qǐng)涉及汽車,尤其涉及一種車輛控制方法、電子設(shè)備、存儲(chǔ)介質(zhì)及程序產(chǎn)品。
背景技術(shù):
1、隨著科技的發(fā)展和用戶對(duì)車輛舒適度要求的不斷提高,車輛增加了舒適制動(dòng)功能。在非緊急制動(dòng)的工況下,駕駛員輕踏制動(dòng)踏板,車輛產(chǎn)生較小的減速度,當(dāng)車速降到某一較低速度值時(shí),舒適制動(dòng)功能激活,將制動(dòng)壓力從開(kāi)始的設(shè)定值以一定的斜率降到最終功能退出的設(shè)定值,幫助駕駛員更好的控制車輛制動(dòng),平緩的制動(dòng)至車輛停止。相關(guān)技術(shù)中,車輛在舒適制動(dòng)過(guò)程中會(huì)產(chǎn)生蠕動(dòng)噪音(groan噪音),減少行車過(guò)程中的蠕動(dòng)噪音,提升駕乘體驗(yàn),成為亟待解決的技術(shù)問(wèn)題。
技術(shù)實(shí)現(xiàn)思路
1、本申請(qǐng)實(shí)施例提供車輛控制方法、電子設(shè)備、存儲(chǔ)介質(zhì)及程序產(chǎn)品,用以達(dá)到減少行車過(guò)程中的蠕動(dòng)噪音的效果。
2、第一方面,本申請(qǐng)實(shí)施例提供一種車輛控制方法,包括:
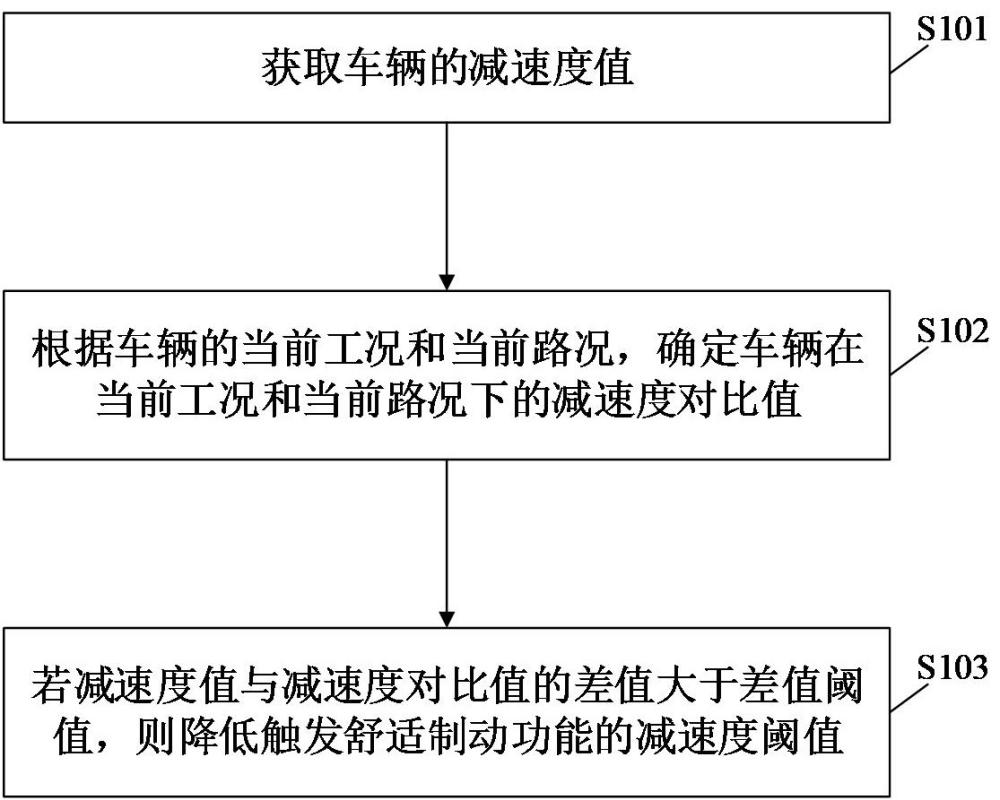
3、獲取車輛的減速度值;
4、根據(jù)車輛的當(dāng)前工況和當(dāng)前路況,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值;
5、若減速度值與減速度對(duì)比值的差值大于差值閾值,則降低觸發(fā)舒適制動(dòng)功能的減速度閾值。
6、在一種可能的實(shí)施方式中,降低觸發(fā)舒適制動(dòng)功能的減速度閾值,包括:
7、確定差值所在的差值范圍;
8、根據(jù)差值范圍,確定減速度閾值的調(diào)整值;
9、根據(jù)調(diào)整值,降低觸發(fā)舒適制動(dòng)功能的減速度閾值。
10、在一種可能的實(shí)施方式中,根據(jù)差值范圍,確定減速度閾值的調(diào)整值,包括:根據(jù)差值范圍確定減速度閾值的調(diào)整值對(duì)應(yīng)的檔位。
11、在一種可能的實(shí)施方式中,根據(jù)車輛的當(dāng)前工況和當(dāng)前路況,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值,包括:
12、獲取車輛的制動(dòng)系統(tǒng)推桿行程;
13、根據(jù)制動(dòng)系統(tǒng)推桿行程,以及制動(dòng)系統(tǒng)推桿行程與液壓缸液壓值的關(guān)聯(lián)關(guān)系,獲取車輛的液壓缸液壓值;
14、根據(jù)車輛的液壓缸液壓值,以及液壓缸液壓值與輪端制動(dòng)力矩值的關(guān)聯(lián)關(guān)系,獲取車輛的輪端制動(dòng)力矩值;
15、根據(jù)輪端制動(dòng)力矩值、車輛的電機(jī)制動(dòng)能力回收值以及當(dāng)前路況下的減速度算法,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值,其中,當(dāng)前路況下的減速度算法表征減速度與輪端制動(dòng)力矩值、電機(jī)制動(dòng)能力回收值、道路坡度值以及車頭朝向之間的關(guān)系。
16、在一種可能的實(shí)施方式中,根據(jù)車輛的當(dāng)前工況和當(dāng)前路況,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值,包括:
17、獲取車輛的輪端制動(dòng)力矩值、電機(jī)制動(dòng)能力回收值以及當(dāng)前路況;
18、根據(jù)輪端制動(dòng)力矩值、電機(jī)制動(dòng)能力回收值以及當(dāng)前路況,從減速度對(duì)比值表中確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值;
19、其中,當(dāng)前路況包括道路坡度值以及車頭朝向,減速度對(duì)比值表是根據(jù)不同輪端制動(dòng)力矩值、不同電機(jī)制動(dòng)能力回收值以及不同路況標(biāo)定得到的減速度值表。
20、在一種可能的實(shí)施方式中,在降低觸發(fā)舒適制動(dòng)功能的減速度閾值之后,還包括:
21、在檢測(cè)到減速度值與減速度對(duì)比值的差值小于或等于差值閾值,則恢復(fù)觸發(fā)舒適制動(dòng)功能的減速度閾值。
22、在一種可能的實(shí)施方式中,方法還包括:
23、若減速度值與減速度對(duì)比值的差值小于或等于差值閾值,則保持觸發(fā)舒適制動(dòng)功能的減速度閾值。
24、第二方面,本申請(qǐng)實(shí)施例提供一種車輛控制裝置,包括:
25、獲取模塊,用于獲取車輛的減速度值;
26、處理模塊,用于根據(jù)車輛的當(dāng)前工況和當(dāng)前路況,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值;
27、處理模塊,還用于若減速度值與減速度對(duì)比值的差值大于差值閾值,則降低觸發(fā)舒適制動(dòng)功能的減速度閾值。
28、第三方面,本申請(qǐng)實(shí)施例提供一種車輛控制設(shè)備,包括:存儲(chǔ)器,處理器;
29、所述存儲(chǔ)器存儲(chǔ)計(jì)算機(jī)執(zhí)行指令;
30、所述處理器執(zhí)行所述存儲(chǔ)器存儲(chǔ)的計(jì)算機(jī)執(zhí)行指令,使得所述處理器執(zhí)行如上第一方面和/或第一方面各種可能的實(shí)施方式。
31、第四方面,本申請(qǐng)實(shí)施例提供一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)中存儲(chǔ)有計(jì)算機(jī)執(zhí)行指令,所述計(jì)算機(jī)執(zhí)行指令被處理器執(zhí)行時(shí)用于實(shí)現(xiàn)如上第一方面和/或第一方面各種可能的實(shí)施方式。
32、第五方面,本申請(qǐng)實(shí)施例提供一種計(jì)算機(jī)程序產(chǎn)品,包括計(jì)算機(jī)程序,該計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)如上第一方面和/或第一方面各種可能的實(shí)施方式。
33、本申請(qǐng)實(shí)施例提供的車輛控制方法、電子設(shè)備、存儲(chǔ)介質(zhì)及程序產(chǎn)品,通過(guò)獲取車輛減速度與理論計(jì)算所得的減速度對(duì)比值進(jìn)行對(duì)比,若減速度與減速度對(duì)比值的差值大于差值閾值,說(shuō)明此時(shí)制動(dòng)系統(tǒng)中的摩擦片的摩擦系數(shù)不穩(wěn)定,將觸發(fā)舒適制動(dòng)功能的減速度閾值降低,避免車輛在較大減速度的情況下觸發(fā)舒適制動(dòng)功能,達(dá)到減少行車過(guò)程中的蠕動(dòng)噪音的效果。
技術(shù)特征:
1.一種車輛控制方法,其特征在于,包括:
2.根據(jù)權(quán)利要求1所述的車輛控制方法,其特征在于,所述降低觸發(fā)舒適制動(dòng)功能的減速度閾值,包括:
3.根據(jù)權(quán)利要求2所述的車輛控制方法,其特征在于,所述根據(jù)所述差值范圍,確定減速度閾值的調(diào)整值,包括:根據(jù)所述差值范圍確定所述減速度閾值的調(diào)整值對(duì)應(yīng)的檔位。
4.根據(jù)權(quán)利要求1至3中任一項(xiàng)所述的車輛控制方法,其特征在于,所述根據(jù)所述車輛的當(dāng)前工況和當(dāng)前路況,確定所述車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值,包括:
5.根據(jù)權(quán)利要求1至3中任一項(xiàng)所述的車輛控制方法,其特征在于,所述根據(jù)所述車輛的當(dāng)前工況和當(dāng)前路況,確定所述車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值,包括:
6.根據(jù)權(quán)利要求1至3中任一項(xiàng)所述的車輛控制方法,其特征在于,在降低觸發(fā)舒適制動(dòng)功能的減速度閾值之后,還包括:
7.根據(jù)權(quán)利要求1至3中任一項(xiàng)所述的車輛控制方法,其特征在于,所述方法還包括:
8.一種車輛控制裝置,其特征在于,包括:
9.一種車輛控制設(shè)備,其特征在于,包括:存儲(chǔ)器,處理器;
10.一種計(jì)算機(jī)可讀存儲(chǔ)介質(zhì),其特征在于,所述計(jì)算機(jī)可讀存儲(chǔ)介質(zhì)中存儲(chǔ)有計(jì)算機(jī)執(zhí)行指令,所述計(jì)算機(jī)執(zhí)行指令被處理器執(zhí)行時(shí)用于實(shí)現(xiàn)如權(quán)利要求1-7任一項(xiàng)所述的方法。
11.一種計(jì)算機(jī)程序產(chǎn)品,其特征在于,包括計(jì)算機(jī)程序,該計(jì)算機(jī)程序被處理器執(zhí)行時(shí)實(shí)現(xiàn)權(quán)利要求1-7任一項(xiàng)所述的方法。
技術(shù)總結(jié)
本申請(qǐng)?zhí)峁┮环N車輛控制方法、電子設(shè)備、存儲(chǔ)介質(zhì)及程序產(chǎn)品,可應(yīng)用于汽車技術(shù)領(lǐng)域。該方法包括:獲取車輛的減速度值;根據(jù)車輛的當(dāng)前工況和當(dāng)前路況,確定車輛在當(dāng)前工況和當(dāng)前路況下的減速度對(duì)比值;若減速度值與減速度對(duì)比值的差值大于差值閾值,則降低觸發(fā)舒適制動(dòng)功能的減速度閾值。使用本申請(qǐng)方案可以達(dá)到減少行車過(guò)程中蠕動(dòng)噪音的效果。
技術(shù)研發(fā)人員:高鳴曉,吳軍,韓振宇,龐士偉,司凱中
受保護(hù)的技術(shù)使用者:浙江吉利控股集團(tuán)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒(méi)有人留言評(píng)論。精彩留言會(huì)獲得點(diǎn)贊!