提高車輛通過減速帶舒適性的方法、電機控制器和車輛與流程
本技術涉及電動車輛領域,并且更具體地,涉及一種提高車輛通過減速帶舒適性的方法、電機控制器和車輛。
背景技術:
1、隨著車輛產業的發展,車輛數量逐年增加,電動車輛的舒適性逐漸成為車輛的重要指標。對于一般消費者,特別是乘客而言,舒適性是十分重要的。電動車輛長時間穩速行車工況主要考慮的場景包括長時間平坦路面駕駛例如高速、高架等快速路和零星顛簸路面駕駛場景例如橋頭包,道路破損導致的坑洼路面兩種。這些場景對于電驅動和整車控制系統在動力輸出特性,噪聲、振動與聲振粗糙度(noise?vibration?harshness,nvh)問題方面提出了挑戰。
2、目前主流的方案是以固定駕駛模式設定為基礎,在特定模式下整車調教對應的驅動、懸架和轉向特性,以滿足不同客戶需求。例如設置普通模式、運動模式和舒適模式等。這樣的方案在特定場景下可以滿足客戶的需求設定,但是無法兼顧不同場景的自動調節,例如舒適模式可以較好地滿足平坦道路行駛工況,但在顛簸路面的場景就會產生輪胎飛跳離地等問題。
3、因此,如何提高電動車輛通過減速帶時的舒適性是需要解決的問題。
技術實現思路
1、本技術提供一種提高車輛通過減速帶舒適性的方法、電機控制器和車輛,在行駛過程中對于短時的顛簸路面工況,通過快速感知路面變化,當車輛接觸路面出現顛簸情況,迅速調整驅動電機扭矩,防止輪速出現大幅波動,提高了車輛的安全性和舒適性。
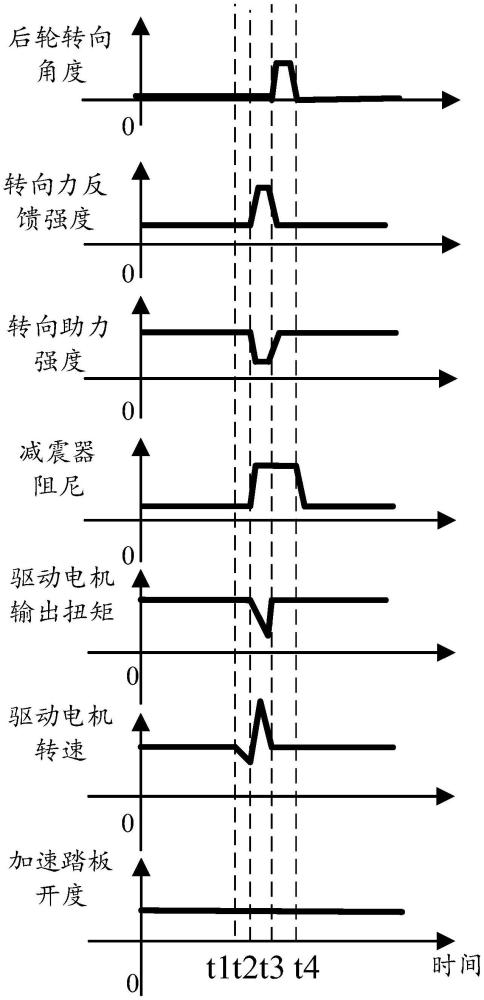
2、第一方面,本技術提供了一種提高電動車輛通過減速帶的舒適性的方法,該方法用于在電動車輛通過減速帶的過程中調節驅動電機的輸出扭矩提高駕乘舒適性,方法包括在電動車輛的車輪接觸減速帶的第一時刻之前,根據加速踏板的開度的變化相應地調節車輪對應的驅動電機輸出的扭矩。在車輪通過減速帶后車輪離地的第二時刻之后、車輪落地的第三時刻之前,在加速踏板的開度變化之前主動減少車輪對應的驅動電機的輸出扭矩。在第三時刻之后,在加速踏板的開度變化之前主動增大車輪對應的驅動電機的輸出扭矩。
3、該電動車輛可以是電動車輛或混合式動力車輛。該電動車輛可以是分布式驅動電機或集中式驅動電機架構,擁有多個驅動電機和多個電機控制器。驅動電機可以是輪邊電機,也可以是輪轂電機,驅動電機可以獨立驅動車輛的一個車輪。
4、本技術中的加速踏板也可以稱為電門踏板或油門踏板。加速踏板的開度可以指示駕駛員需求的驅動力大小,當加速踏板的開度越大,駕駛員對驅動的需求越大,所對應的需要驅動電機輸出的扭矩也越大。電機控制器可以根據加速踏板的開度控制驅動電機輸出加速踏板開度所指示的扭矩,當加速踏板的開度越大,驅動電機輸出的扭矩越大,當加速踏板的開度越小,驅動電機輸出的扭矩越小。電機控制器控制驅動電機輸出的扭矩隨加速踏板的開度的變化而變化。本技術中根據加速踏板的開度的變化相應地調節車輪對應的驅動電機輸出的扭矩,可以是指控制驅動電機輸出加速踏板的開度指示的扭矩,當加速踏板的開度發生變化,控制驅動電機輸出的扭矩隨加速踏板的開度變化而變化。
5、電動車輛在平坦道路上行駛時,根據加速踏板的開度的變化相應地調節車輪對應的驅動電機輸出的扭矩。在第一時刻之前,電動車輛行駛在平坦道路上,此時控制電動車輛的驅動電機輸出加速踏板的開度所指示的扭矩。在第一時刻,電動車輛的車輪接觸減速帶,電動車輛行駛到了顛簸路面。電動車輛的車輪接觸減速帶,車輪的負載扭矩增大,車輪和懸架被壓縮,電動車輛繼續行駛,車輪和懸架壓縮被釋放,從而導致車輪在第二時刻躍離地面。在車輪通過減速帶后車輪離地的第二時刻之后、車輪落地的第三時刻之前,由于車輪離地懸空,路面失去了和路面的附著,車輪的附著系數急劇減小,車輪的負載扭矩發生突變,如果驅動電機的輸出扭矩不變,此時會導致驅動電機的轉速發生突變,而后第三時刻車輪落地,車輪的負載扭矩重新恢復,驅動電機的轉速發生再次劇烈變化,此時會對車輪以及懸架造成很大的沖擊,也會讓車輛發生較大的頓挫,引起駕乘人員的不適。而本技術實施例提供的技術方案會在第二時刻和第三時刻之間,在加速踏板的開度變化之前主動減少車輪對應的驅動電機的輸出扭矩。這樣,在車輪躍離地面之后,驅動電機的輸出扭矩迅速減小,從而抑制了驅動電機轉速的大幅波動,第三時刻車輪落地時電動車輛受到的沖擊以及車輛的頓挫會得到緩解,從而減小了車輛通過減速度過程中對車輛的沖擊和破壞,也提高了駕乘人員的駕乘舒適性。
6、應理解地,該方法還用于在電動車輛通過其他顛簸路面時調節驅動電機的輸出扭矩提高駕乘舒適性。在電動車輛的車輪接觸不平度大于預設不平度的路面的第一時刻之前,根據加速踏板的開度的變化相應地調節車輪對應的驅動電機輸出的扭矩。在車輪通過不平度大于預設不平度的路面后車輪離地的第二時刻之后、車輪落地的第三時刻之前,在加速踏板的開度變化之前主動減少車輪對應的驅動電機的輸出扭矩。在第三時刻之后,在加速踏板的開度變化之前主動增大車輪對應的驅動電機的輸出扭矩。
7、電動車輛的車輪接觸的顛簸的路面可以是例如減速帶、路面凸起或路面凹坑等,當電動車輛的車輪接觸到顛簸路面時,車輪可能離地,車輪的附著系數或發生變化,驅動電機的負載扭矩發生突變,此時會導致驅動電機的轉速發生突變,對電動車輛的硬件可能造成損傷,輪速的突變也可能導致電動車輛速度突變,造成急加速或急減速,導致駕乘人員的不適感。預設不平度可以是根據實車實驗和/或模型計算預先標定的,也可以是綜合考慮整車需求和車輛性能而預先設置的。
8、應理解地,驅動電機輸出的扭矩也可以是負值。驅動電機包括定子繞組和轉子,通過向三相定子繞組輸出交流電,可以控制驅動電機輸出扭矩。通過電機控制器調節定子繞組電流的大小以及三相電流的相位,就可以改變定子磁場強度和方向,從而改變定子與轉子間相互作用力即電機扭矩。改變向電機輸出的三相電流的相位,使轉子切割定子繞組產生的磁場,轉子的動能變成電能輸入動力電池中,此時電機輸出負扭矩。電機控制器改變向電機輸出的三相電流的大小,就可以增大或減小電機輸出的正扭矩或負扭矩。當驅動電機輸出扭矩為負值時,車輪收到反向扭矩,驅動電機輸出的扭矩用于制動該車輪。
9、應理解地,電動車輛在行駛過程中有驅動工況和回饋工況。在驅動工況下,電動車輛驅動電機輸出正扭矩以驅動車輪,在第二時刻之后、第三時刻之前,驅動電機的負載扭矩發生突變,此時會導致驅動電機的轉速突然大幅度增大,此時需要主動控制驅動電機降低正扭矩輸出。在回饋工況下,電動車輛驅動電機輸出負扭矩以制動車輪,在第二時刻之后、第三時刻之前,驅動電機的負載扭矩發生突變,此時會導致驅動電機的轉速突然大幅度降低,此時需要主動控制驅動電機降低負扭矩輸出,降低負扭矩可以理解為降低負扭矩的絕對值,即增大扭矩的負值。
10、根據本技術的方案,在行駛過程中對于短時的顛簸路面工況,通過快速感知路面變化,迅速調整驅動電機輸出的扭矩,防止輪速出現大幅波動,提高了車輛的安全性和舒適性。
11、結合第一方面,在第一方面的某些實現方式中,方法還包括在主動增大驅動電機的輸出扭矩之后,根據加速踏板的開度的變化相應地調節驅動電機輸出的扭矩。
12、在第三時刻之后,車輪落地,電動車輛回到平坦路面,在加速踏板的開度變化之前,主動控制驅動電機增大扭矩輸出以使驅動電機輸出的驅動扭矩增大至等于加速踏板開度所指示的扭矩,恢復電動車輛的驅動力。在第三時刻之后,控制驅動電機輸出加速踏板的開度指示的扭矩,當加速踏板的開度發生變化,控制驅動電機輸出的扭矩隨加速踏板的開度變化而變化。
13、根據本技術的方案,在電動車輛駛過顛簸路面,車輪落地后,重新控制驅動電機增大扭矩至加速踏板的開度指示的扭矩,并隨開度的變化而變化,提高了車輛的動力性和舒適性。
14、結合第一方面,在第一方面的某些實現方式中,方法還包括在第二時刻和第三時刻之間,驅動電機的旋變傳感器所指示的驅動電機的轉速突變,主動控制驅動電機輸出的扭矩減小,驅動電機的轉速突變是指驅動電機的轉速的增大率大于預設值。
15、旋變傳感器可以精確檢測電機轉子的位置、方向和速度,負責監測和提取驅動電機旋轉速度,采樣率高,且與電機控制器40直接信號連接,信號傳遞時間短,穩定性更高。通過旋變傳感器的旋變信號可以獲取驅動電機的轉速。通過驅動電機轉速可以計算得到驅動電機的負載扭矩。在車輪離地的第二時刻之后、車輪落地的第三時刻之前,驅動電機的轉速會發生突變,因此可以采用驅動電機轉速的負載觀測,感知路面是否出現極端情況的趨勢。
16、在車輪離地的第二時刻之后、車輪落地的第三時刻之前,旋變傳感器指示的驅動電機轉速在預設時長的變化值大于預設值,和/或車輪的負載扭矩小于第一預設負載,和/或車輪的負載扭矩在預設時長內的變化值大于預設負載,主動控制驅動電機輸出的扭矩減小。
17、根據本技術的方案,通過旋變信號檢測驅動電機轉速情況,快速感知路面情況變化,響應迅速,可以有效提高檢測電動車輛接觸路面變化的速度和效率。
18、結合第一方面,在第一方面的某些實現方式中,方法還包括在第二時刻和第三時刻之間,控制電動車輛的懸架系統增大懸架系統的減震器的阻尼。
19、懸架系統用于連接電動車輛車身與車輪,在電動車輛行駛過程中提供支撐、緩沖和穩定的作用。懸架系統可以包括減震器。每個車輪可以單獨通過減震器與電動車輛的車身相連接。對于帶有阻尼可調減震器的懸架系統,可以向懸架系統發送目標阻尼系數或者目標阻尼等級,從而調整每個減震器的阻尼。
20、在第二時刻和第三時刻之間,電動車輛的車輪因為駛過減速帶發生離地,懸架系統會吸收路面的沖擊,如果減震器的阻尼較小,則有可能出現劇烈顛簸的問題。因此需要增大減震器的阻尼,提高減震器硬度,降低輪胎相對車身的位移,保證輪胎和路面的接觸。
21、根據申請的方案,在行駛過程中對于短時的顛簸路面工況,通過增大減震器的阻尼,以安全性優先,保證輪胎與路面的接觸,提高了車輛的安全性和舒適性。
22、結合第一方面,在第一方面的某些實現方式中,方法具體包括在第二時刻和所述第三時刻之間,電動車輛的車速越大,控制減震器的阻尼增大量越大。
23、電動車輛在行駛過程中遇到減速帶或其他顛簸路面時,電動車輛的車速越大,需要吸收的沖擊可能也越大,因此調整車輪至目標阻尼越大越能提供足夠的支撐力。
24、根據本技術的方案,根據電動車輛的車速確定減震器阻尼,充分利用懸架系統的穩定控制功能,快速實現車輛穩定性控制,提高了車輛安全性和舒適性。
25、結合第一方面,在第一方面的某些實現方式中,方法還包括在第三時刻之后的第四時刻,控制電動車輛的懸架系統減小減震器的阻尼。
26、在第三時刻,電動車輛的車輪落地,重新駛入平坦路面,由于車輪剛接觸地面,電動車輛的車身由于懸架系統的緩沖作用仍在運動,如果此時減震器阻尼較小,電動車輛的車身上下運動的幅度會較大,此時應該保持較大的減震器阻尼。在第三時刻之后的一段時長內,保持懸架系統的減震器阻尼較大,在這段時長內,電動車輛的車身運動趨于平穩,在第三時刻經過一段時長的第四時刻,控制懸架系統減小減震器的阻尼。
27、應理解地,第三時刻到第四時刻的這段時長可以是根據實車實驗和/或模型計算預先標定的,也可以是綜合考慮整車需求和車輛性能而預先設置的。
28、根據本技術的方案,當電動車輛駛過了顛簸路面,懸架系統保持一段時長的大阻尼,待電動車輛車身穩定后,減小懸架系統減震器的阻尼。
29、結合第一方面,在第一方面的某些實現方式中,方法還包括在第二時刻和第三時刻之間,控制轉向系統降低電動車輛的方向盤的轉向助力強度并增大方向盤的轉向反饋力度。
30、方向盤轉向助力強度是指方向盤轉向時提供的助力的大小。轉向助力是協助駕駛員進行汽車方向調整的技術,可以為駕駛員減輕打方向盤的用力強度。當駕駛員轉動方向盤時,轉向系統可以產生輔助力,從而幫助駕駛員輕松完成轉向動作。
31、車輛轉向系統的力反饋可以通過提供方向盤阻力矩以實時為駕駛員提供路感反饋。減小方向盤的轉向反饋力度可以減輕駕駛員的路感,對路面的顛簸進行過濾。增大方向盤的轉向反饋力度可以增強駕駛員的路感,提高駕駛員的操控性。
32、在第二時刻和第三時刻之間,電動車輛的車輪離地,路面的阻力突變降低,電動車輛的方向盤的路感變低,駕駛員會感覺方向盤突然變輕,如果駕駛員保持與在平坦路面行駛時相同的力度控制方向盤會導致方向盤角度增大。為了保證電動車輛的安全性,主動降低電動車輛的方向盤的轉向助力強度并增大方向盤的轉向反饋力度,從而提高電動車輛的操控性。
33、根據本技術的方案,在電動車輛遇到顛簸時,以安全性優先,增強轉向系統的力反饋,主動減小方向助力,增強駕駛員路感,提高了電動車輛的安全性和操控性。
34、結合第一方面,在第一方面的某些實現方式中,控制方法還包括在第三時刻之后,控制轉向系統增大電動車輛的方向盤的轉向助力強度并減小方向盤的轉向反饋力度。
35、在第三時刻之后,電動車輛的車輪落地,電動車輛重新駛入平坦的路面,此時控制轉向系統重新恢復舒適性參數,控制轉向系統增大電動車輛的方向盤的轉向助力強度并減小方向盤的轉向反饋力度。
36、根據本技術的方案,當電動車輛駛過了顛簸路面,重新恢復轉向系統的舒適性參數,增大電動車輛的方向盤的轉向助力強度并減小方向盤的轉向反饋力度,提高了電動車輛的舒適性。
37、結合第一方面,在第一方面的某些實現方式中,控制方法還包括在第三時刻之后,主動控制電動車輛的轉向系統調整兩個后輪的轉向角度以使電動車輛按照方向盤所指示的方向行駛。
38、電動車輛的轉向系統可以控制后輪轉向。轉向系統可以改變兩個后輪的轉動角度和朝向,從而電動車輛可以通過不同的轉向方式有效調節車輛的轉向和操控特性。在車速較低時,當后輪的轉向方向與前輪的轉向方向相反時,可以減少轉彎半徑,提升車輛整體的操控和靈活性。在車速較高時,當后輪的轉向方向與前輪的轉向方向相同時,可以有效降低轉向操作所產生的車輛橫擺力矩,增強車輛行駛的穩定性。
39、在第三時刻之后,電動車輛的車輪落地,電動車輛重新駛入平坦的路面。由于電動車輛剛駛過顛簸路面,電動車輛可能出現拋跳等極端情況,當電動車輛落地時可能發生方向的偏移,電動車輛行駛方向與方向盤轉角指示的角度不同,為了使電動車輛重新受控行駛,控制電動車輛的兩個后輪轉向,兩個后輪的轉向角度與電動車輛發生偏移的方向相同,使得電動車輛按照方向盤所指示的方向行駛。
40、在第三時刻,可以結合電動車輛狀態包括橫擺角速度和質心側偏角的變化,檢測電動車輛是否發生跑偏。電動車輛行駛方向偏離方向盤轉角指示的角度,包括電動車輛的橫擺加速度大于預設加速度或電動車輛的質心側偏角大于預設角度。
41、應理解地,在第三時刻,電動車輛的車速越大,控制電動車輛的轉向系統調整兩個后輪的轉向角度越小。
42、當車速越快時,后輪轉向角度對車輛姿態和軌跡的影響也會越大,此時通過轉向施加橫擺控制力矩也會越大,危險性也會越大,車速越高越容易有失控的風險,因此當車速越大,轉向系統控制后輪的轉向角度越小。
43、根據本技術的方案,當電動車輛駛過了顛簸路面,如果電動車輛發生行駛方向偏移,主動介入修正,根據不同的車輛行駛狀態調整后輪的轉向角度,保障車輛不跑偏,降低了車輛失控的風險,提高了電動車輛的安全性。
44、結合第一方面,在第一方面的某些實現方式中,方法還包括從第三時刻之后的第五時刻到第五時刻之后的第六時刻,電動車輛的加速踏板開度的增大值小于預設值,控制驅動電機輸出的扭矩的增大值為零。從第三時刻之后的第七時刻到第七時刻之后的第八時刻,電動車輛的加速踏板開度的增大值大于預設值,控制驅動電機輸出的扭矩增大。
45、當加速踏板的開度小幅度變化導致指示的扭矩反復變化時,如果驅動電機始終響應加速踏板的開度變化,會導致駕乘人員產生反復加減速的不適感受。當電動車輛在平坦路面行駛時,為了保證駕乘人員的舒適性,電動車輛的驅動電機可以不響應加速踏板的小開度變化。
46、從第五時刻到第六時刻,加速踏板開度的變化小于預設差值,即加速踏板開度變化為小開度變化,此時控制驅動電機輸出的扭矩的增大值為零。
47、從第七時刻到第八時刻,加速踏板開度的變化大于預設差值,即加速踏板開度變化為大開度變化,反映了駕駛員真正的加速意圖,此時控制驅動電機輸出的扭矩的增大。
48、根據本技術的方案,過濾加速踏板的小開度變化,驅動電機不響應加速踏板的小開度變化造成的扭矩反復變化,減少了反復加減速的不適感受,提高了電動車輛的舒適性。
49、結合第一方面,在第一方面的某些實現方式中,方法還包括在第三時刻之后,當電動車輛的加速踏板開度小于第一預設開度,控制電動車輛的加速踏板的力反饋增大。
50、當電動車輛的加速踏板開度小于第一預設開度,電動車輛的加速踏板處于低開度,此時電動車輛速度較低,如果加速踏板的力反饋較小,駕駛員容易踩下加速踏板,導致開度快速變化,電動車輛加速度較大,使駕乘人員感到不適。因此可以增大電動車輛的加速踏板的力反饋,使得駕駛員可以有效控制加速幅度。
51、根據本技術的方案,增強加速踏板低開度下的力反饋,有效提高電動車輛的安全性和可控性。
52、結合第一方面,在第一方面的某些實現方式中,控制方法還包括在第三時刻之后,控制驅動電機輸出的扭矩在預設時長內的變化值始終小于預設扭矩。
53、當電動車輛在平坦路面行駛時,可以對驅動扭矩進行濾波,以舒適性為導向的整車加速度和加速度變化率控制,通過實時急動度觀測對目標扭矩進行補償,防止扭矩的急速變化。
54、根據本技術的方案,控制驅動電機輸出的扭矩變化率始終不會過大,避免了電動車輛的急加速和急減速的不適感,提高了電動車輛的舒適性。
55、第二方面,本技術提供了一種電機控制器,電機控制器用于提高電動車輛通過減速帶過程中的舒適性,電機控制器用于在電動車輛的車輪接觸減速帶的第一時刻之前,根據加速踏板的開度的變化相應地調節車輪對應的驅動電機輸出的扭矩。在車輪通過減速帶后車輪離地的第二時刻之后、車輪落地的第三時刻之前,在加速踏板的開度變化之前主動減少車輪對應的驅動電機的輸出扭矩。在第三時刻之后,在加速踏板的開度變化之前主動增大車輪對應的驅動電機的輸出扭矩。
56、該電機控制器適用于電動車輛或混合動力車輛,該電動車輛可以是分布式電機或集中式電機架構,擁有多個驅動電機和多個電機控制器,該電機控制器可以是多個電機控制器中的任意一個。
57、結合第二方面,在第二方面的某些實現方式中,電機控制器還用于在第二時刻和第三時刻之間,向電動車輛的懸架系統發送輪胎離地標志位信號,輪胎離地標志位信號用于指示車輪躍離路面。輪胎離地標志位信號用于指示懸架系統控制電動車輛的懸架系統增大懸架系統的減震器的阻尼。
58、結合第二方面,在第二方面的某些實現方式中,電機控制器還用于在第二時刻和第三時刻之間,向電動車輛的轉向系統發送輪胎離地標志位信號,輪胎離地標志位信號用于指示車輪躍離路面。輪胎離地標志位信號用于指示轉向系統降低方向盤的轉向助力強度并增大方向盤的轉向反饋力度。
59、第三方面,本技術提供了一種電動車輛,該電動車輛包括如第二方面中所述的電機控制器電機控制器用于接收動力電池供電并驅動驅動電機轉動。
60、結合第三方面,在第三方面的某些實現方式中,該電動車輛包括懸架系統和轉向系統。懸架系統用于響應于輪胎離地標志位信號,控制電動車輛的懸架系統增大懸架系統的減震器的阻尼。轉向系統用于響應于輪胎離地標志位信號,降低方向盤的轉向助力強度并增大方向盤的轉向反饋力度。
61、其它方面的有益效果可以參考第一方面描述的有益效果,此處不再贅述。
- 還沒有人留言評論。精彩留言會獲得點贊!