無人駕駛食材配送裝置的制作方法
本發(fā)明涉及自動化領(lǐng)域,具體為無人駕駛食材配送裝置。
背景技術(shù):
1、隨著電子商務(wù)和外賣行業(yè)的迅速發(fā)展,消費(fèi)者對食品及食材配送的需求日益增長,尤其是在生鮮食品和冷鏈配送領(lǐng)域,對配送的時效性、精準(zhǔn)性以及食品安全保障的要求愈發(fā)嚴(yán)格。無人駕駛食材配送裝置的提出,旨在解決配送過程中的人工依賴問題,通過智能化技術(shù)實(shí)現(xiàn)高效、精準(zhǔn)、低成本的食材運(yùn)輸,同時減少人工操作引發(fā)的食品安全隱患,推動食材配送向智能化、環(huán)保化方向發(fā)展。
2、現(xiàn)有技術(shù)中,傳統(tǒng)配送方式主要依靠人工駕駛的機(jī)動車、電動車或電動三輪車完成。其優(yōu)勢在于配送模式成熟,能夠適應(yīng)不同距離、不同種類的貨物運(yùn)輸需求,同時依托現(xiàn)有的物流調(diào)度系統(tǒng),能夠?qū)崿F(xiàn)一定程度的集中管理與資源優(yōu)化。此外,近年來部分配送企業(yè)嘗試使用無人機(jī)或無人車進(jìn)行配送,在一定程度上提升了配送效率,并減少了配送過程中對人工的依賴。
3、現(xiàn)有技術(shù)中,無人車在行駛過程中通常采用太陽能板吸收太陽能作為主要能源以支持長時間行駛,這種設(shè)計(jì)在一定程度上提高了能源利用效率并減少了碳排放。然而,現(xiàn)有太陽能板的固定設(shè)計(jì)存在明顯不足,即在車輛行駛過程中,太陽能板無法根據(jù)光照角度進(jìn)行動態(tài)調(diào)整。當(dāng)光照角度發(fā)生變化,例如太陽高度角改變或受到周圍建筑物和樹木遮擋時,太陽能板的吸收效率會大幅下降,導(dǎo)致能源轉(zhuǎn)化效率不穩(wěn)定。此外,在陰天或夜晚等低光照環(huán)境下,固定式太陽能板的供能能力進(jìn)一步減弱,無法滿足無人車的正常運(yùn)行需求。這種能源供應(yīng)的不確定性直接影響了無人車的續(xù)航能力和運(yùn)行穩(wěn)定性,尤其是在長距離或高頻次配送場景中,限制了其實(shí)際應(yīng)用的廣度和靈活性。
技術(shù)實(shí)現(xiàn)思路
1、針對現(xiàn)有技術(shù)的不足,本發(fā)明提供了無人駕駛食材配送裝置,解決了現(xiàn)有技術(shù)中無人車太陽能板無法根據(jù)光照角度動態(tài)調(diào)整、導(dǎo)致能源轉(zhuǎn)化效率不穩(wěn)定的問題。
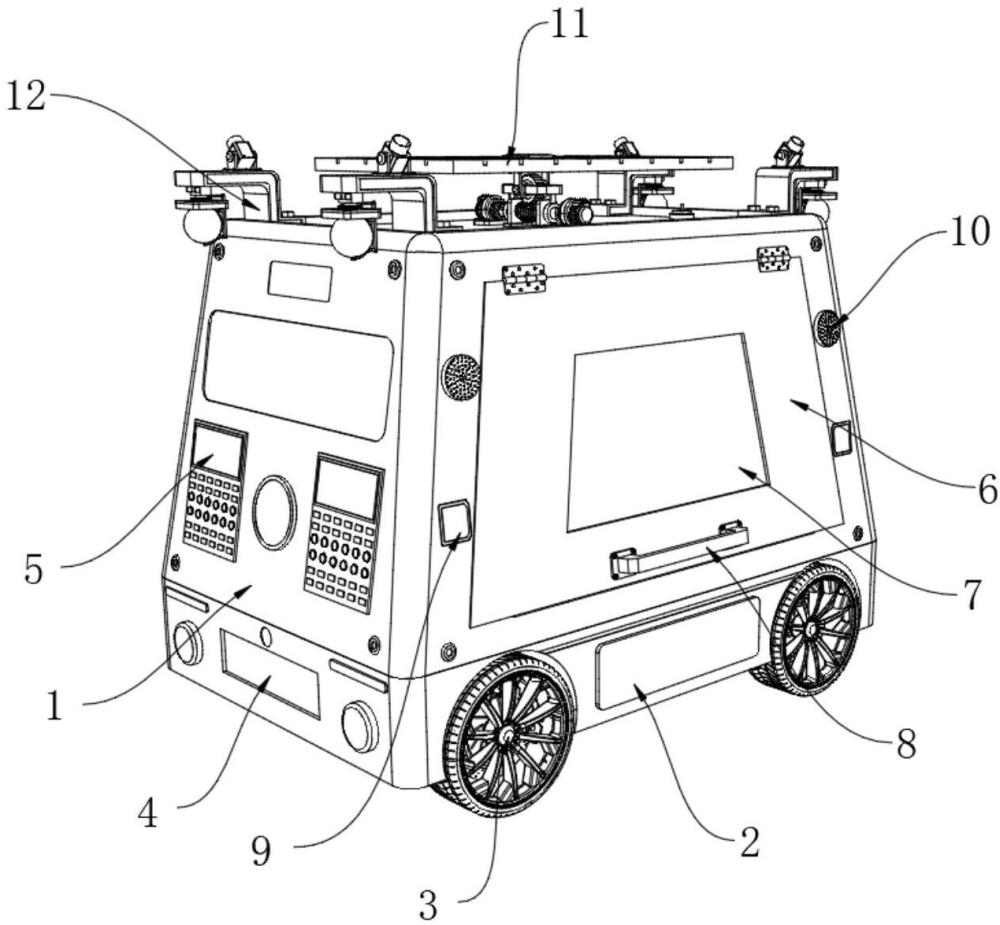
2、為實(shí)現(xiàn)以上目的,本發(fā)明通過以下技術(shù)方案予以實(shí)現(xiàn):無人駕駛食材配送裝置,包括無人車和太陽能板,所述無人車底部固定連接有底盤,所述底盤中部轉(zhuǎn)動連接有車輪,所述底盤一側(cè)設(shè)有車牌,所述無人車兩側(cè)均轉(zhuǎn)動連接有蓋板,所述無人車頂部設(shè)有調(diào)節(jié)組件,其用于帶動太陽能板根據(jù)光照的角度進(jìn)行調(diào)節(jié);
3、所述調(diào)節(jié)組件包括固定架,所述固定架固定連接在所述無人車的頂部,所述固定架具體設(shè)置有兩個,其中一個所述固定架中部固定連接有電機(jī)一,另一個所述固定架中部固定連接有電機(jī)二,所述電機(jī)二輸出端固定連接有蝸桿,所述蝸桿外周轉(zhuǎn)動連接有活動環(huán),所述活動環(huán)外壁固定連接有調(diào)節(jié)架一,所述調(diào)節(jié)架一中部轉(zhuǎn)動連接有轉(zhuǎn)桿,所述轉(zhuǎn)桿外周固定連接有蝸輪,所述蝸輪和所述蝸桿相互嚙合,所述轉(zhuǎn)桿兩端均固定連接有調(diào)節(jié)架二,所述太陽能板固定連接在所述調(diào)節(jié)架二的頂部,所述無人車頂部設(shè)置有支撐組件,其用于對蝸桿進(jìn)行支撐限位。
4、優(yōu)選的,所述無人車頂部固定連接有支撐架,所述支撐架頂部固定連接有信號傳感器,所述支撐架底部滑動連接有固定殼,所述固定殼中部滑動連接有擠壓板,所述擠壓板一側(cè)固定連接有卡塊,所述支撐架底部開設(shè)有卡槽,所述卡槽和所述卡塊相卡接,所述擠壓板遠(yuǎn)離所述卡塊的一側(cè)設(shè)有復(fù)位組件,其用于將卡塊向外進(jìn)行頂出。
5、優(yōu)選的,所述復(fù)位組件包括壓簧,所述壓簧固定連接在所述擠壓板的一側(cè),所述壓簧遠(yuǎn)離所述擠壓板的一端固定連接有限位板,所述擠壓板遠(yuǎn)離所述壓簧的一側(cè)固定連接有撥片。
6、優(yōu)選的,所述固定殼底部固定連接有支撐桿,所述支撐桿底部固定連接有固定板,所述固定板底部固定連接有攝像頭和防塵殼,所述固定板內(nèi)部固定連接有電機(jī)三,所述電機(jī)三輸出端固定連接有移動桿,所述移動桿頂部固定連接有小齒輪,所述支撐桿外周轉(zhuǎn)動連接有大齒輪,所述大齒輪和所述小齒輪相互嚙合,所述大齒輪頂部設(shè)有清理組件,其用于對防塵殼的表面進(jìn)行清理。
7、優(yōu)選的,所述清理組件包括連接桿,所述連接桿固定連接在所述大齒輪的頂部,所述連接桿遠(yuǎn)離所述大齒輪的一端固定連接有活動板,所述活動板一側(cè)固定連接有彈簧桿,所述彈簧桿遠(yuǎn)離所述活動板的一端固定連接有刮板。
8、優(yōu)選的,所述支撐組件包括支撐板,所述支撐板固定連接在所述無人車的頂部,所述活動環(huán)一側(cè)固定連接在所述電機(jī)一的輸出端。
9、優(yōu)選的,所述太陽能板頂部固定連接有光照傳感器,所述無人車頂部固定連接有角度傳感器。
10、優(yōu)選的,所述無人車兩側(cè)均固定連接有圖像傳感器,所述無人車遠(yuǎn)離所述圖像傳感器的一側(cè)固定連接有控制面板,所述無人車靠近所述圖像傳感器的一側(cè)固定連接有蜂鳴器。
11、優(yōu)選的,所述蓋板中部固定連接有觀察窗,所述蓋板遠(yuǎn)離所述無人車一側(cè)固定連接有把手。
12、本發(fā)明提供了無人駕駛食材配送裝置。具備以下有益效果:
13、1、本發(fā)明通過電機(jī)二帶動蝸桿進(jìn)行轉(zhuǎn)動,蝸桿進(jìn)行轉(zhuǎn)動時可方便帶動蝸輪進(jìn)行嚙合轉(zhuǎn)動,當(dāng)蝸輪進(jìn)行轉(zhuǎn)動時會通過轉(zhuǎn)桿帶動調(diào)節(jié)架二進(jìn)行翻轉(zhuǎn),而調(diào)節(jié)架二進(jìn)行翻轉(zhuǎn)時會帶動太陽能板同時進(jìn)行橫向翻轉(zhuǎn),從而可方便對太陽能板進(jìn)行角度進(jìn)行調(diào)節(jié),進(jìn)而可方便根據(jù)光照的角度進(jìn)行調(diào)節(jié);通過電機(jī)一帶動活動環(huán)進(jìn)行轉(zhuǎn)動,當(dāng)活動環(huán)進(jìn)行轉(zhuǎn)動時可通過調(diào)節(jié)架一帶動調(diào)節(jié)架二進(jìn)行翻轉(zhuǎn),進(jìn)而可方便帶動太陽能板進(jìn)行豎向翻轉(zhuǎn),同時可方便進(jìn)行進(jìn)一步調(diào)節(jié),并且提高了裝置整體的適用性。
14、2、本發(fā)明通過攝像頭的作用下可方便對路況進(jìn)行實(shí)時觀察,當(dāng)按動兩個撥片時可帶動擠壓板同時進(jìn)行移動,擠壓板進(jìn)行移動時可對壓簧進(jìn)行擠壓,而擠壓板對壓簧進(jìn)行擠壓的同時會帶動卡塊進(jìn)行移動,從而使得卡塊脫離卡槽,當(dāng)卡塊脫離卡槽后可方便對攝像頭進(jìn)行更換或者維修,進(jìn)而減少了操作人員的勞動強(qiáng)度,同時提高了工作效率。
15、3、本發(fā)明通過電機(jī)三帶動移動桿進(jìn)行轉(zhuǎn)動,而移動桿進(jìn)行轉(zhuǎn)動時會帶動小齒輪同時進(jìn)行轉(zhuǎn)動,當(dāng)小齒輪進(jìn)行轉(zhuǎn)動時可方便帶動大齒輪進(jìn)行嚙合轉(zhuǎn)動,大齒輪進(jìn)行轉(zhuǎn)動時可帶動連接桿進(jìn)行圓周運(yùn)動,而連接桿進(jìn)行圓周運(yùn)動時會帶動活動板同時進(jìn)行移動,當(dāng)活動板進(jìn)行移動時會通過彈簧桿帶動刮板同時進(jìn)行移動,刮板進(jìn)行移動時可方便對防塵殼的表面進(jìn)行清理,防止了大量灰塵對防塵殼造成影響,同時在防塵殼的作用下可方便對攝像頭進(jìn)行防護(hù),進(jìn)而提高了攝像頭的使用壽命,并且提高了裝置整體的適用性。
技術(shù)特征:
1.無人駕駛食材配送裝置,包括無人車(1)和太陽能板(11),其特征在于,所述無人車(1)底部固定連接有底盤(2),所述底盤(2)中部轉(zhuǎn)動連接有車輪(3),所述底盤(2)一側(cè)設(shè)有車牌(4),所述無人車(1)兩側(cè)均轉(zhuǎn)動連接有蓋板(6),所述無人車(1)頂部設(shè)有調(diào)節(jié)組件,其用于帶動太陽能板(11)根據(jù)光照的角度進(jìn)行調(diào)節(jié);
2.根據(jù)權(quán)利要求1所述的無人駕駛食材配送裝置,其特征在于,所述無人車(1)頂部固定連接有支撐架(12),所述支撐架(12)頂部固定連接有信號傳感器(13),所述支撐架(12)底部滑動連接有固定殼(27),所述固定殼(27)中部滑動連接有擠壓板(39),所述擠壓板(39)一側(cè)固定連接有卡塊(35),所述支撐架(12)底部開設(shè)有卡槽(34),所述卡槽(34)和所述卡塊(35)相卡接,所述擠壓板(39)遠(yuǎn)離所述卡塊(35)的一側(cè)設(shè)有復(fù)位組件,其用于將卡塊(35)向外進(jìn)行頂出。
3.根據(jù)權(quán)利要求2所述的無人駕駛食材配送裝置,其特征在于,所述復(fù)位組件包括壓簧(40),所述壓簧(40)固定連接在所述擠壓板(39)的一側(cè),所述壓簧(40)遠(yuǎn)離所述擠壓板(39)的一端固定連接有限位板(41),所述擠壓板(39)遠(yuǎn)離所述壓簧(40)的一側(cè)固定連接有撥片(38)。
4.根據(jù)權(quán)利要求2所述的無人駕駛食材配送裝置,其特征在于,所述固定殼(27)底部固定連接有支撐桿(28),所述支撐桿(28)底部固定連接有固定板(37),所述固定板(37)底部固定連接有攝像頭(44)和防塵殼(16),所述固定板(37)內(nèi)部固定連接有電機(jī)三(42),所述電機(jī)三(42)輸出端固定連接有移動桿(43),所述移動桿(43)頂部固定連接有小齒輪(36),所述支撐桿(28)外周轉(zhuǎn)動連接有大齒輪(29),所述大齒輪(29)和所述小齒輪(36)相互嚙合,所述大齒輪(29)頂部設(shè)有清理組件,其用于對防塵殼(16)的表面進(jìn)行清理。
5.根據(jù)權(quán)利要求4所述的無人駕駛食材配送裝置,其特征在于,所述清理組件包括連接桿(30),所述連接桿(30)固定連接在所述大齒輪(29)的頂部,所述連接桿(30)遠(yuǎn)離所述大齒輪(29)的一端固定連接有活動板(31),所述活動板(31)一側(cè)固定連接有彈簧桿(32),所述彈簧桿(32)遠(yuǎn)離所述活動板(31)的一端固定連接有刮板(33)。
6.根據(jù)權(quán)利要求1所述的無人駕駛食材配送裝置,其特征在于,所述支撐組件包括支撐板(18),所述支撐板(18)固定連接在所述無人車(1)的頂部,所述活動環(huán)(22)一側(cè)固定連接在所述電機(jī)一(19)的輸出端。
7.根據(jù)權(quán)利要求1所述的無人駕駛食材配送裝置,其特征在于,所述太陽能板(11)頂部固定連接有光照傳感器(15),所述無人車(1)頂部固定連接有角度傳感器(14)。
8.根據(jù)權(quán)利要求1所述的無人駕駛食材配送裝置,其特征在于,所述無人車(1)兩側(cè)均固定連接有圖像傳感器(9),所述無人車(1)遠(yuǎn)離所述圖像傳感器(9)的一側(cè)固定連接有控制面板(5),所述無人車(1)靠近所述圖像傳感器(9)的一側(cè)固定連接有蜂鳴器(10)。
9.根據(jù)權(quán)利要求1所述的無人駕駛食材配送裝置,其特征在于,所述蓋板(6)中部固定連接有觀察窗(7),所述蓋板(6)遠(yuǎn)離所述無人車(1)一側(cè)固定連接有把手(8)。
技術(shù)總結(jié)
本發(fā)明涉及自動化領(lǐng)域,公開了無人駕駛食材配送裝置,包括無人車和太陽能板,所述無人車底部固定連接有底盤,所述底盤中部轉(zhuǎn)動連接有車輪,所述底盤一側(cè)設(shè)有車牌,所述無人車兩側(cè)均轉(zhuǎn)動連接有蓋板,所述無人車頂部設(shè)有調(diào)節(jié)組件,其用于帶動太陽能板根據(jù)光照的角度進(jìn)行調(diào)節(jié),所述調(diào)節(jié)組件包括固定架,所述固定架固定連接在所述無人車的頂部,所述固定架具體設(shè)置有兩個,其中一個所述固定架中部固定連接有電機(jī)一。通過電機(jī)二、蝸桿、蝸輪、調(diào)節(jié)架二、電機(jī)一、活動環(huán)等主要結(jié)構(gòu)的相互配合下,可方便對太陽能板進(jìn)行角度進(jìn)行調(diào)節(jié),進(jìn)而可方便根據(jù)光照的角度進(jìn)行調(diào)節(jié),并且提高了裝置整體的適用性。
技術(shù)研發(fā)人員:陳啟科
受保護(hù)的技術(shù)使用者:遼寧科玲農(nóng)業(yè)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點(diǎn)贊!