用于人車共駕的控制方法、電子設(shè)備和程序產(chǎn)品與流程
本公開涉及汽車,并且更具體地,涉及用于人車共駕的控制方法、電子設(shè)備和程序產(chǎn)品。
背景技術(shù):
1、在汽車領(lǐng)域,車載高級駕駛輔助系統(tǒng)(adas)開始在很多車輛中部署。adas是一種主動安全技術(shù),利用安裝在車內(nèi)的各類傳感器,如攝像頭、雷達、激光和超聲波等,來采集車內(nèi)外環(huán)境數(shù)據(jù),進行靜態(tài)和動態(tài)物體的識別、檢測和跟蹤,從而幫助用戶提前意識到可能存在的危險,提高駕駛的安全性和舒適性。
2、另外adas中的交通擁堵輔助功能(traffic?jam?assist,tja)的應(yīng)用也越來越廣泛。tja系統(tǒng)主要是在車輛處于交通擁堵的工況下發(fā)揮作用。它通過車輛上的多種傳感器,如毫米波雷達、攝像頭等來感知周圍的交通環(huán)境。這些傳感器可以檢測到前方車輛的距離、速度,以及車道線的位置等信息。當(dāng)系統(tǒng)判定車輛處于擁堵路況(一般是車速較低的情況,不同汽車廠商設(shè)定的車速范圍可能有所不同,通常在一定的低速區(qū)間,如低于60km/h)時,它會自動接管車輛的部分駕駛操作。tja系統(tǒng)主要功能包括有自動跟車和車道保持輔助等。
3、此外,在車輛的駕駛動作執(zhí)行機構(gòu)中,電動助力轉(zhuǎn)向系統(tǒng)(electric?powersteering,eps)是一種利用電動機提供轉(zhuǎn)向助力的裝置,是汽車轉(zhuǎn)向系統(tǒng)的重要組成部分。eps一般包括有電子控制單元(ecu)、扭矩傳感器車速傳感器和電動機等。
技術(shù)實現(xiàn)思路
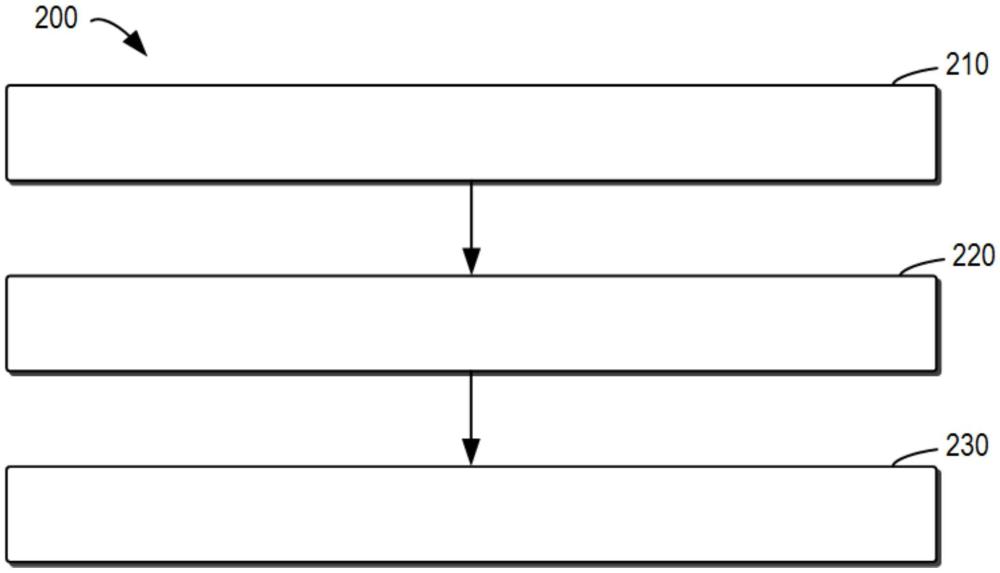
1、在本公開的實施例的第一方面中,提供一種用于人車共駕的控制方法。該方法包括獲取所述車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。
2、在本公開的實施例的第二方面中,提供一種用于人車共駕的域控制器。該域控制器包括處理器以及與處理器耦合的存儲器。該存儲器具有存儲于其中的指令,該指令使處理器執(zhí)行用于人車共駕的控制方法。該方法包括獲取所述車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。
3、在本公開的實施例的第三方面中,提供了一種車輛,該車輛包括電子設(shè)備,電子設(shè)備被配置用于執(zhí)行根據(jù)本公開提供的一種用于人車共駕的控制方法。該方法包括獲取所述車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。
4、在本公開的實施例的第四方面中,提供了一種計算機程序產(chǎn)品。該計算機程序產(chǎn)品被有形地存儲在非暫態(tài)計算機可讀介質(zhì)上并且包括機器可執(zhí)行指令,該機器可執(zhí)行指令在被執(zhí)行時使機器實現(xiàn)根據(jù)本公開提供的一種人車共駕的控制方法。該方法包括獲取所述車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。
5、在本公開的實施例的第五方面中,提供了一種計算機可讀存儲介質(zhì),其中在該計算機可讀介質(zhì)上存儲有機器可執(zhí)行指令,該機器可執(zhí)行指令在被執(zhí)行時使機器實現(xiàn)根據(jù)本公開提供的一種人車共駕的控制方法。該方法包括獲取所述車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。
6、應(yīng)當(dāng)理解,
技術(shù)實現(xiàn)要素:
部分中所描述的內(nèi)容并非旨在限定本公開的實施例的關(guān)鍵或重要特征,亦非用于限制本公開的范圍。本公開的其他特征將通過以下的描述變得容易理解。
技術(shù)特征:
1.一種用于人車共駕的控制方法(200),包括:
2.根據(jù)權(quán)利要求1所述的方法(200),其中所述獲取(210)所述車輛的扭矩信息包括:
3.根據(jù)權(quán)利要求1所述的方法(200),其中所述扭矩信息與所述滯回因子具有預(yù)定的映射關(guān)系。
4.根據(jù)權(quán)利要求3所述的方法(200),所述方法還包括:
5.根據(jù)權(quán)利要求4所述的方法(200),其中所述接管駕駛中期的所述滯后梯度的絕對值小于所述接管駕駛初期的所述滯后梯度的絕對值和所述接管駕駛的后期的所述滯后梯度的絕對值中的任何一項。
6.根據(jù)權(quán)利要求4所述的方法(200),所述方法還包括:
7.根據(jù)權(quán)利要求1所述的方法(200),其中所述車輛的駕駛功能的所述駕駛參數(shù)包括車輪扭矩限制或車輪轉(zhuǎn)角中的至少一項,
8.根據(jù)權(quán)利要求7所述的方法(200),其中所述調(diào)整所述車輪扭矩限制或所述車輪轉(zhuǎn)角中的至少一項以減小所述駕駛功能對所述用戶的接管駕駛的阻滯包括:
9.根據(jù)權(quán)利要求8所述的方法(200),其中所述調(diào)整所述車輪扭矩限制或所述車輪轉(zhuǎn)角中的至少一項以減小所述駕駛功能對所述用戶的接管駕駛的阻滯還包括:
10.一種域控制器(800),包括:
11.一種計算機程序產(chǎn)品,所述計算機程序產(chǎn)品包括機器可執(zhí)行指令,所述機器可執(zhí)行指令在被執(zhí)行時使機器實現(xiàn)根據(jù)權(quán)利要求1-12中任一項所述的方法。
技術(shù)總結(jié)
本公開涉及用于人車共駕的控制方法、電子設(shè)備和程序產(chǎn)品。該方法包括獲取車輛的扭矩信息。該方法還包括基于扭矩信息,確定用于控制車輛的滯回因子,其中滯回因子通過調(diào)整車輛的駕駛功能的駕駛參數(shù)以減小駕駛功能對用戶的接管駕駛的阻滯。并且該方法還包括基于滯回因子,調(diào)整車輛的駕駛功能的駕駛參數(shù)。通過該方法,實現(xiàn)了更平穩(wěn)、更靈活的車輛控制過程。
技術(shù)研發(fā)人員:胡文濤
受保護的技術(shù)使用者:羅伯特·博世有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/24
- 還沒有人留言評論。精彩留言會獲得點贊!