一種AGV汽車搬運機器人的行走轉向機構的制作方法
本技術涉及搬運機器人,尤其涉及一種agv汽車搬運機器人的行走轉向機構。
背景技術:
1、agv汽車搬運機器人是指具有電磁或光學等自動導引裝置,能夠沿著規定的導引路徑行駛,具有安全保護以及各種移載功能的運輸車,工業應用中不需要駕駛員、可以充電并通過電腦控制其行進路線及行為。
2、但是在目前使用中的部分agv汽車搬運機器人,一般采用舵輪驅動,在現有技術中舵輪結構中的電機多數是放置在舵輪側邊的,使得整個舵輪回轉所需的空間變大,導致整個輪體結構出現導向不精準、動力結構和轉向機構復雜、轉彎半徑大的問題,不利于agv汽車搬運機器人優化行進路線,不便于在空間受限的場景中使用。
技術實現思路
1、本實用新型的目的是為了解決現有技術中存在的缺點,而提出的一種agv汽車搬運機器人的行走轉向機構。
2、為了實現上述目的,本實用新型采用了如下技術方案:
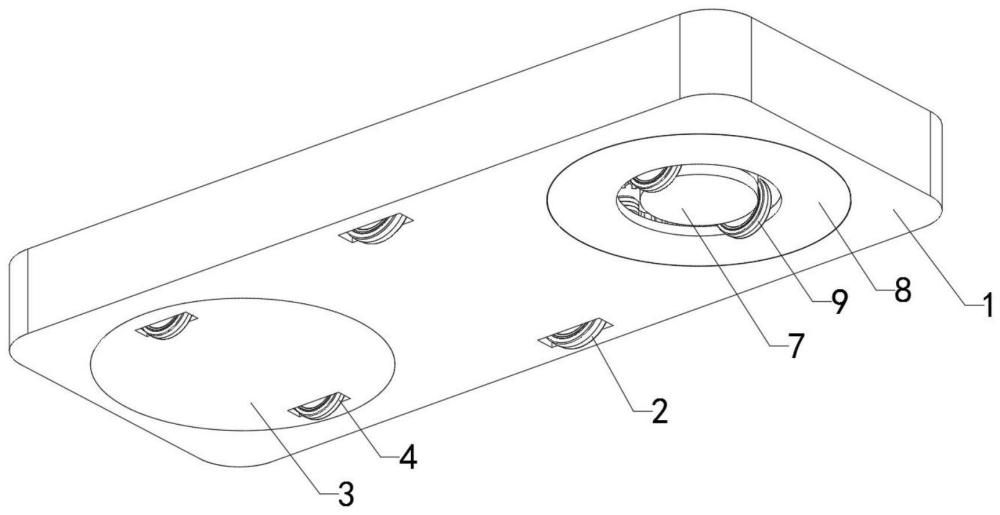
3、一種agv汽車搬運機器人的行走轉向機構,包括搬運車和第一轉向輪,所述搬運車底部一端轉動安裝有第一轉向臺,第一轉向臺底部兩側轉動安裝有兩個第一轉向輪,搬運車底部另一端轉動安裝有第二轉向臺,第二轉向臺底部兩側轉動安裝有兩個第二轉向輪,第一轉向臺和第二轉向臺之間的搬運車車體內設置有轉向機構。
4、優選的,所述搬運車中部兩側轉動安裝有穩定輪,兩個穩定輪之間的間距大于兩個第一轉向輪之間的間距。
5、優選的,所述第一轉向臺中心固定安裝有雙軸電機,雙軸電機兩個輸出軸末端與兩個第一轉向輪固定連接。
6、優選的,所述第一轉向臺頂端外圈設置有外齒輪,外齒輪一側嚙合有轉動安裝在搬運車車體內的第一齒輪。
7、優選的,所述第二轉向臺頂部開設有環形槽,環形槽側壁設置有內齒輪,內齒輪接近第一齒輪一側嚙合有第二齒輪。
8、優選的,所述第二轉向臺下方的搬運車底端固定安裝有環形的固定板,第二齒輪的轉軸轉動連接于固定板頂部。
9、優選的,所述轉向機構包括轉向電機和傳動皮帶,第一齒輪的轉軸底端固定連接有皮帶輪,第二齒輪的轉軸底端固定連接有從動皮帶輪,皮帶輪與從動皮帶輪之間通過傳動皮帶連接,第一齒輪的轉軸中部固定連接有第四齒輪,第四齒輪遠離第一轉向臺一側嚙合有第三齒輪,第一齒輪一側的搬運車車體內固定安裝有轉向電機,轉向電機的輸出軸與第三齒輪中心固定連接。
10、與現有技術相比,本實用新型的有益效果是:
11、本實用新型通過設置第一轉向臺和第二轉向臺,第一轉向臺和第二轉向臺均可以進行整體的轉動從而帶動第一轉向輪和第二轉向輪進行整體的轉動,其中雙軸電機工作帶動兩個第一轉向輪同步轉動,可有效的節約動力機構的空間占用,同時雙軸電機與轉向機構分開布置,可降低搬運車內結構復雜程度,即可在節約出來的空間內增加搬運車的附帶功能,提升搬運車的智能程度。
12、本實用新型通過設置轉向機構,在進行轉向的過程中通過轉向機構的控制,使得第一轉向臺和第二轉向臺的轉動方向相反,即可實現搬運車的小半徑轉向甚至在空間受限的場景中實現原地調頭的操作,與傳統的舵輪方式相比,有效的擴展了搬運車的使用范圍,提升了搬運車的導向效果,使得搬運車的行進路線得到優化,能提升汽車搬運的效率,降低時間損耗。
技術特征:
1.一種agv汽車搬運機器人的行走轉向機構,包括搬運車(1)和第一轉向輪(4),其特征在于:所述搬運車(1)底部一端轉動安裝有第一轉向臺(3),第一轉向臺(3)底部兩側轉動安裝有兩個第一轉向輪(4),搬運車(1)底部另一端轉動安裝有第二轉向臺(7),第二轉向臺(7)底部兩側轉動安裝有兩個第二轉向輪(9),第一轉向臺(3)和第二轉向臺(7)之間的搬運車(1)車體內設置有轉向機構(12)。
2.根據權利要求1所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述搬運車(1)中部兩側轉動安裝有穩定輪(2),兩個穩定輪(2)之間的間距大于兩個第一轉向輪(4)之間的間距。
3.根據權利要求1所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述第一轉向臺(3)中心固定安裝有雙軸電機(5),雙軸電機(5)兩個輸出軸末端與兩個第一轉向輪(4)固定連接。
4.根據權利要求1所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述第一轉向臺(3)頂端外圈設置有外齒輪(6),外齒輪(6)一側嚙合有轉動安裝在搬運車(1)車體內的第一齒輪(61)。
5.根據權利要求4所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述第二轉向臺(7)頂部開設有環形槽(10),環形槽(10)側壁設置有內齒輪(11),內齒輪(11)接近第一齒輪(61)一側嚙合有第二齒輪(111)。
6.根據權利要求5所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述第二轉向臺(7)下方的搬運車(1)底端固定安裝有環形的固定板(8),第二齒輪(111)的轉軸轉動連接于固定板(8)頂部。
7.根據權利要求5所述的一種agv汽車搬運機器人的行走轉向機構,其特征在于:所述轉向機構(12)包括轉向電機(13)和傳動皮帶(17),第一齒輪(61)的轉軸底端固定連接有皮帶輪(16),第二齒輪(111)的轉軸底端固定連接有從動皮帶輪,皮帶輪(16)與從動皮帶輪之間通過傳動皮帶(17)連接,第一齒輪(61)的轉軸中部固定連接有第四齒輪(15),第四齒輪(15)遠離第一轉向臺(3)一側嚙合有第三齒輪(14),第一齒輪(61)一側的搬運車(1)車體內固定安裝有轉向電機(13),轉向電機(13)的輸出軸與第三齒輪(14)中心固定連接。
技術總結
本技術涉及搬運機器人技術領域,具體的公開了一種AGV汽車搬運機器人的行走轉向機構,包括搬運車和第一轉向輪,搬運車底部一端轉動安裝有第一轉向臺,第一轉向臺底部兩側轉動安裝有兩個第一轉向輪,搬運車底部另一端轉動安裝有第二轉向臺,第二轉向臺底部兩側轉動安裝有兩個第二轉向輪,第一轉向臺和第二轉向臺之間的搬運車車體內設置有轉向機構。轉向機構可實現搬運車的小半徑轉向甚至在空間受限的場景中實現原地調頭的操作,有效的擴展了搬運車的使用范圍,提升了搬運車的導向效果,使得搬運車的行進路線得到優化,能提升汽車搬運的效率,降低時間損耗。
技術研發人員:李立婷,杜萬兵,卓小寶
受保護的技術使用者:安徽鴻杰威爾停車設備有限公司
技術研發日:20240419
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!