循跡倒車規劃路徑的確定方法、裝置、介質、設備及車輛與流程
本技術涉及智能駕駛,具體而言,涉及一種循跡倒車規劃路徑的確定方法、裝置、介質、設備及車輛。
背景技術:
1、循跡倒車是輔助駕駛系統中的一種輔助功能,駕駛輔助系統中的倒車輔助功能會記錄倒車前的行駛路線,可循跡自動倒回相應距離,無需駕駛者控制方向盤,尤其在窄巷等狹窄路況倒車的時候,可支持自動循跡原路返回功能,無需手動操作就能自動完成倒車操作。
2、然而,當歷史行駛路徑比較復雜和冗長時,這種原路返回的循跡倒車路徑也會相對復雜且冗長。在d檔轉r擋,再轉d檔的場景中,即先向前行駛,中途偏離原先路線進行倒車,最后在新路線上前行,若采用原路返回的循跡倒車路徑進行自動倒車,那么將會是復雜且冗長的三段路。如圖1所示,車輛先沿著道路s1從點o行駛至點a,再從點a起開始偏離道路s1倒車至道路s2上的點b,最后沿著道路s2行駛至點e,若采用原路返回的循跡倒車路徑,則需要車輛沿著eb、ba、ao三條路段進行自動倒車,倒車規劃路徑復雜且冗長。
技術實現思路
1、本技術提供了一種循跡倒車規劃路徑的確定方法、裝置、介質、設備及車輛,能夠解決當歷史行駛路徑比較復雜和冗長時,沿著原路返回的循跡倒車路徑也會相對復雜且冗長的問題。
2、具體的技術方案如下:
3、第一方面,本技術實施例提供了一種循跡倒車規劃路徑的確定方法,所述方法包括:
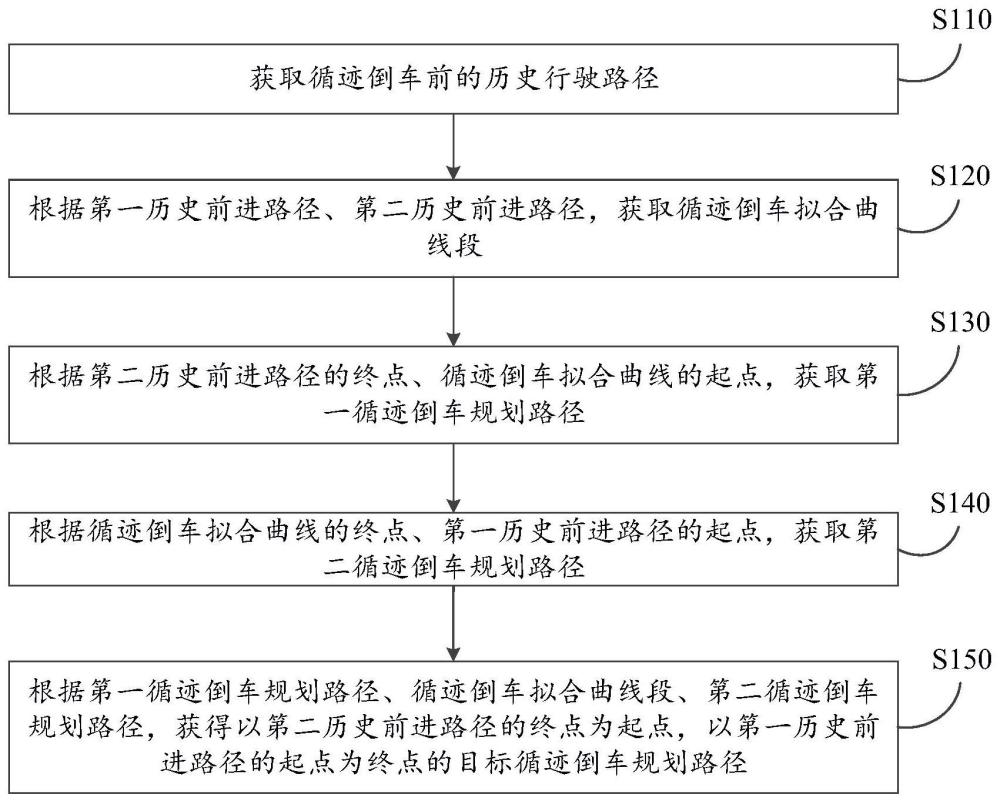
4、獲取循跡倒車前的歷史行駛路徑,其中,所述歷史行駛路徑依次包括第一歷史前進路徑、歷史倒車路徑和第二歷史前進路徑;
5、根據所述第一歷史前進路徑、所述第二歷史前進路徑,獲取循跡倒車擬合曲線段,其中,所述循跡倒車擬合曲線段的起點位于所述第二歷史前進路徑上,所述循跡倒車擬合曲線段的終點位于所述第一歷史前進路徑上,且所述循跡倒車擬合曲線段由所述起點到所述終點的車輛行駛方向為車輛倒車方向;
6、根據所述第二歷史前進路徑的終點、所述循跡倒車擬合曲線段的起點,獲取第一循跡倒車規劃路徑;
7、根據所述循跡倒車擬合曲線段的終點、所述第一歷史前進路徑的起點,獲取第二循跡倒車規劃路徑;以及
8、根據所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段、所述第二循跡倒車規劃路徑,獲得以所述第二歷史前進路徑的終點為起點,以所述第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。
9、通過上述方案可知,本技術實施例先根據第一歷史前進路徑、第二歷史前進路徑,獲取循跡倒車擬合曲線段,再根據第二歷史前進路徑的終點、循跡倒車擬合曲線段的起點,獲得第一循跡倒車規劃路徑,根據循跡倒車擬合曲線段的終點、第一歷史前進路徑的起點,獲得第二循跡倒車規劃路徑,最后根據第一循跡倒車規劃路徑、循跡倒車擬合曲線段、第二循跡倒車規劃路徑,獲得以第二歷史前進路徑的終點為起點,以第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。相比于原路返回需要先倒車、再前進、再倒車行駛的循跡倒車路徑而言,該目標循跡倒車規劃路徑僅包括倒車行駛路徑,行駛路徑簡單平滑,而且路程也大大縮減,從而可以提高循跡倒車的效率以及駕乘人員的舒適度。
10、在第一方面的第一種可能的實現方式中,所述根據所述第一歷史前進路徑、所述第二歷史前進路徑,獲取循跡倒車擬合曲線段,包括:
11、對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣,獲得所述第一歷史前進路徑上的第一采樣點和所述第二歷史前進路徑上的第二采樣點;
12、在第一夾角和第二夾角均大于或者等于預設角度閾值的情況下,對第一中間路徑和第二中間路徑進行采樣,獲得所述第一中間路徑上的第三采樣點和所述第二中間路徑上的第四采樣點,其中,所述第一中間路徑包括在所述第一歷史前進路徑上,所述第一歷史前進路徑的起點和所述第一采樣點之間的路徑,所述第二中間路徑包括在所述第二歷史前進路徑上,所述第二采樣點和所述第二歷史前進路徑的終點之間的路徑,所述第一夾角包括所述第一采樣點和所述第二采樣點構成的路徑與所述第一中間路徑之間的夾角,所述第二夾角包括所述第一采樣點和所述第二采樣點構成的路徑與所述第二中間路徑之間的夾角;
13、對所述第三采樣點和所述第四采樣點進行曲線擬合,獲得循跡倒車擬合曲線段,其中,所述第三采樣點為所述循跡倒車擬合曲線段的終點,所述第四采樣點為所述循跡倒車擬合曲線段的起點。
14、通過上述方案可知,本技術實施例能夠在獲取到包括第一歷史前進路徑、歷史倒車路徑和第二歷史前進路徑的歷史行駛路徑后,先對第一歷史前進路徑和第二歷史前進路徑進行采樣,直至基于第一采樣點和第二采樣點確定的第一夾角和第二夾角均大于或者等于預設角度閾值時,再繼續對分別由第一采樣點和第二采樣點作為邊界點的第一中間路徑和第二中間路徑進行采樣,并對采樣得到的第三采樣點和第四采樣點進行曲線擬合,獲得循跡倒車擬合曲線段。通過這種兩層采樣的方式獲得的循跡倒車擬合曲線段與第一循跡倒車規劃路徑和第二循跡倒車規劃路徑的銜接更加平滑,從而可以在縮短路程的基礎上,進一步提高了駕乘人員的舒適度。
15、在第一方面的第二種可能的實現方式中,在對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣之前,所述方法還包括:
16、按照所述第一歷史前進路徑上最后兩個軌跡點的方向,對所述第一歷史前進路徑延長預設長度;
17、所述對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣,包括:
18、對延長后的所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣。
19、通過上述方案可知,本技術實施例通過在對第一歷史前進路徑延長預設長度后,再對延長后的第一歷史前進路徑和第二歷史前進路徑進行采樣,從而可以防止極端情況下采樣取到第二歷史前進路徑的終點時,導致第一歷史前進路徑無法采樣。
20、在第一方面的第三種可能的實現方式中,所述根據所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段、所述第二循跡倒車規劃路徑,獲得以所述第二歷史前進路徑的終點為起點,以所述第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑包括:
21、在所述循跡倒車擬合曲線段的最大曲率小于車輛最大曲率的情況下,將所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段和所述第二循跡倒車規劃路徑進行拼接,獲得以所述第二歷史前進路徑的終點為起點,以所述第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。
22、通過上述方案可知,本技術實施例只有在循跡倒車擬合曲線段的最大曲率小于車輛最大曲率的情況下,才將第一循跡倒車規劃路徑、循跡倒車擬合曲線段和第二循跡倒車規劃路徑進行拼接,從而能夠使得車輛安全駛過循跡倒車擬合曲線段,避免發生因車輛達不到循跡倒車擬合曲線段的曲率而無法行駛的問題。
23、在第一方面的第四種可能的實現方式中,所述方法還包括:
24、在所述循跡倒車擬合曲線段的最大曲率大于或等于所述車輛最大曲率的情況下,返回執行所述對第一中間路徑和第二中間路徑進行采樣。
25、在第一方面的第五種可能的實現方式中,在所述循跡倒車擬合曲線段的最大曲率小于車輛最大曲率的情況下,將所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段和所述第二循跡倒車規劃路徑進行拼接包括:
26、在所述循跡倒車擬合曲線段的最大曲率小于所述車輛最大曲率的情況下,對所述循跡倒車擬合曲線段的縱坐標進行采樣,獲得多個第五采樣點;
27、確定車輛在每個所述第五采樣點處的多邊形輪廓;
28、分別計算靜態障礙物上每個點到每個所述多邊形輪廓上的最近距離;
29、在所有所述最近距離均大于零的情況下,將所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段和所述第二循跡倒車規劃路徑進行拼接。
30、通過上述方案可知,本技術實施例通過判斷靜態障礙物與車輛在循跡倒車擬合曲線段上每個第五采樣點處的多邊形輪廓之間的最近距離,來模擬車輛沿著循跡倒車擬合曲線段行駛時是否會與周邊的靜態障礙物發生碰撞,只有在不會發生碰撞的情況下,才將第一循跡倒車規劃路徑、循跡倒車擬合曲線段和第二循跡倒車規劃路徑進行拼接,從而提高了循跡倒車的安全性。
31、在第一方面的第六種可能的實現方式中,所述方法還包括:
32、在存在所述最近距離均小于或者等于零的情況下,返回執行所述對第一中間路徑和第二中間路徑進行采樣。
33、在第一方面的第七種可能的實現方式中,所述方法還包括:
34、在所述第一夾角或所述第二夾角小于所述預設角度閾值的情況下,返回執行所述對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣。
35、第二方面,本技術實施例提供了一種循跡倒車規劃路徑的確定裝置,所述裝置包括:
36、歷史路徑獲取單元,用于獲取循跡倒車前的歷史行駛路徑,其中,所述歷史行駛路徑依次包括第一歷史前進路徑、歷史倒車路徑和第二歷史前進路徑;
37、擬合曲線獲取單元,用于根據所述第一歷史前進路徑、所述第二歷史前進路徑,獲取循跡倒車擬合曲線段,其中,所述循跡倒車擬合曲線段的起點位于所述第二歷史前進路徑上,所述循跡倒車擬合曲線段的終點位于所述第一歷史前進路徑上,且所述循跡倒車擬合曲線段由所述起點到所述終點的車輛行駛方向為車輛倒車方向;
38、第一倒車規劃路徑獲取單元,用于根據所述第二歷史前進路徑的終點、所述循跡倒車擬合曲線段的起點,獲取第一循跡倒車規劃路徑;
39、第二倒車規劃路徑獲取單元,用于根據所述循跡倒車擬合曲線段的終點、所述第一歷史前進路徑的起點,獲取第二循跡倒車規劃路徑;
40、目標倒車規劃路徑獲得單元,用于根據所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段、所述第二循跡倒車規劃路徑,獲得以所述第二歷史前進路徑的終點為起點,以所述第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。
41、在第二方面的第一種可能的實現方式中,所述擬合曲線獲取單元,包括:
42、第一采樣模塊,用于對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣,獲得所述第一歷史前進路徑上的第一采樣點和所述第二歷史前進路徑上的第二采樣點;
43、第二采樣模塊,用于在第一夾角和第二夾角均大于或者等于預設角度閾值的情況下,對第一中間路徑和第二中間路徑進行采樣,獲得所述第一中間路徑上的第三采樣點和所述第二中間路徑上的第四采樣點,其中,所述第一中間路徑包括在所述第一歷史前進路徑上,所述第一歷史前進路徑的起點和所述第一采樣點之間的路徑,所述第二中間路徑包括在所述第二歷史前進路徑上,所述第二采樣點和所述第二歷史前進路徑的終點之間的路徑,所述第一夾角包括所述第一采樣點和所述第二采樣點構成的路徑與所述第一中間路徑之間的夾角,所述第二夾角包括所述第一采樣點和所述第二采樣點構成的路徑與所述第二中間路徑之間的夾角;
44、擬合模塊,用于對所述第三采樣點和所述第四采樣點進行曲線擬合,獲得循跡倒車擬合曲線段,其中,所述第三采樣點為所述循跡倒車擬合曲線段的終點,所述第四采樣點為所述循跡倒車擬合曲線段的起點。
45、在第二方面的第二種可能的實現方式中,所述擬合曲線獲取單元還包括:
46、延長模塊,用于在對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣之前,按照所述第一歷史前進路徑上最后兩個軌跡點的方向,對所述第一歷史前進路徑延長預設長度;
47、所述第一采樣模塊,用于對延長后的所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣。
48、在第二方面的第三種可能的實現方式中,所述目標倒車規劃路徑獲得單元,用于在所述循跡倒車擬合曲線段的最大曲率小于車輛最大曲率的情況下,將所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段和所述第二循跡倒車規劃路徑進行拼接,獲得以所述第二歷史前進路徑的終點為起點,以所述第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。
49、在第二方面的第四種可能的實現方式中,所述第二采樣模塊,還用于在所述循跡倒車擬合曲線段的最大曲率大于或等于所述車輛最大曲率的情況下,對第一中間路徑和第二中間路徑進行采樣。
50、在第二方面的第五種可能的實現方式中,所述目標倒車規劃路徑獲得單元包括:
51、第三采樣模塊,用于在所述循跡倒車擬合曲線段的最大曲率小于所述車輛最大曲率的情況下,對所述循跡倒車擬合曲線段的縱坐標進行采樣,獲得多個第五采樣點;
52、確定模塊,用于確定車輛在每個所述第五采樣點處的多邊形輪廓;
53、計算模塊,用于分別計算靜態障礙物上每個點到每個所述多邊形輪廓上的最近距離;
54、拼接模塊,用于在所有所述最近距離均大于零的情況下,將所述第一循跡倒車規劃路徑、所述循跡倒車擬合曲線段和所述第二循跡倒車規劃路徑進行拼接。
55、在第二方面的第六種可能的實現方式中,所述第二采樣模塊,還用于在存在所述最近距離均小于或者等于零的情況下,對第一中間路徑和第二中間路徑進行采樣。
56、在第二方面的第七種可能的實現方式中,所述第一采樣模塊,還用于在所述第一夾角或所述第二夾角小于所述預設角度閾值的情況下,對所述第一歷史前進路徑和所述第二歷史前進路徑進行采樣。
57、通過上述方案可知,本技術實施例先根據第一歷史前進路徑、第二歷史前進路徑,獲取循跡倒車擬合曲線段,再根據第二歷史前進路徑的終點、循跡倒車擬合曲線段的起點,獲得第一循跡倒車規劃路徑,根據循跡倒車擬合曲線段的終點、第一歷史前進路徑的起點,獲得第二循跡倒車規劃路徑,最后根據第一循跡倒車規劃路徑、循跡倒車擬合曲線段、第二循跡倒車規劃路徑,獲得以第二歷史前進路徑的終點為起點,以第一歷史前進路徑的起點為終點的目標循跡倒車規劃路徑。相比于原路返回的循跡倒車路徑而言,該目標循跡倒車規劃路徑不但簡單平滑,而且路程也大大縮減,從而可以提高循跡倒車的效率以及駕乘人員的舒適度。
58、第三方面,本技術實施例提供了一種計算機可讀存儲介質,其上存儲有計算機程序,該程序被處理器執行時實現如第一方面任一可能的實現方式所述的方法。
59、第四方面,本技術實施例提供了一種電子設備,電子設備包括:
60、一個或多個處理器;
61、所述處理器與存儲裝置耦合,所述存儲裝置用于存儲一個或多個程序;
62、當一個或多個程序被一個或多個處理器執行,使得電子設備實現如第一方面任一可能的實現方式所述的方法。
63、第五方面,本技術實施例提供了一種車輛,車輛包含如第二方面任一可能的實現方式所述的裝置,或者包含如第四方面所述的電子設備。
64、第六方面,本技術實施例提供了一種計算機程序產品,所述計算機程序產品中包含有指令,當指令在計算機或處理器上運行時,使得計算機或處理器執行第一方面任一可能的實現方式所述的方法。
- 還沒有人留言評論。精彩留言會獲得點贊!