點膠噴嘴掛膠實時在線檢測方法及其檢測系統(tǒng)與流程
本發(fā)明涉及點膠,尤其涉及一種點膠噴嘴掛膠實時在線檢測方法及其檢測系統(tǒng)。
背景技術:
1、在點膠行業(yè)中,噴嘴掛膠是一個較為常見的問題,膠水的粘度較高、流動性較差時,容易在噴嘴處殘留并逐漸堆積形成掛膠;噴嘴的內徑過小、出口形狀不規(guī)則或內壁不光滑等,都會增加膠水的掛壁幾率;點膠壓力過大或速度過快,會使膠水在噴嘴內形成較大的沖擊力,導致膠水飛濺并掛在噴嘴上,相反,壓力過小或速度過慢,膠水流出不順暢,也容易在噴嘴處堆積,連續(xù)長時間的點膠作業(yè),會使噴嘴長時間與膠水接觸,增加掛膠的可能性;而且如果點膠頻率過高,噴嘴沒有足夠的時間將殘留膠水排空,也會導致掛膠。
2、為了解決上述問題,現(xiàn)有技術通過高分辨率攝像頭和先進的圖像處理算法,能夠監(jiān)測噴嘴的掛膠情況,實現(xiàn)高精度檢測,可精確識別噴嘴上的微小掛膠。此外,利用激光檢測技術,通過激光束對噴嘴表面進行掃描,根據反射光的變化來判斷是否存在掛膠,具有非接觸、高精度的特點。這些方案通常需要停機對針頭進行掛膠檢測,未與點膠作業(yè)流程進行結合,影響點膠機的工作效率和良品率;針對噴嘴膠水的掛膠檢測,膠水與噴嘴或周圍環(huán)境的顏色對比度極低,人眼或普通的視覺檢測系統(tǒng)很難清晰地分辨出膠水與背景的界限,使得掛膠難以被準確識別。且膠水對光線的吸收能力較強,同時可能存在反光不均勻的情況,這會導致在圖像采集時,掛膠區(qū)域的亮度與周圍區(qū)域差異不明顯,增加了圖像處理和分析的難度,容易出現(xiàn)誤判或漏判。
技術實現(xiàn)思路
1、本發(fā)明旨在至少解決現(xiàn)有技術中存在的技術問題之一。
2、為此,本發(fā)明提供一種點膠噴嘴掛膠實時在線檢測方法,檢測準確性高、效率快,點膠產品的良品率高。
3、根據本發(fā)明實施例的點膠噴嘴掛膠實時在線檢測方法,所述方法包括以下步驟:
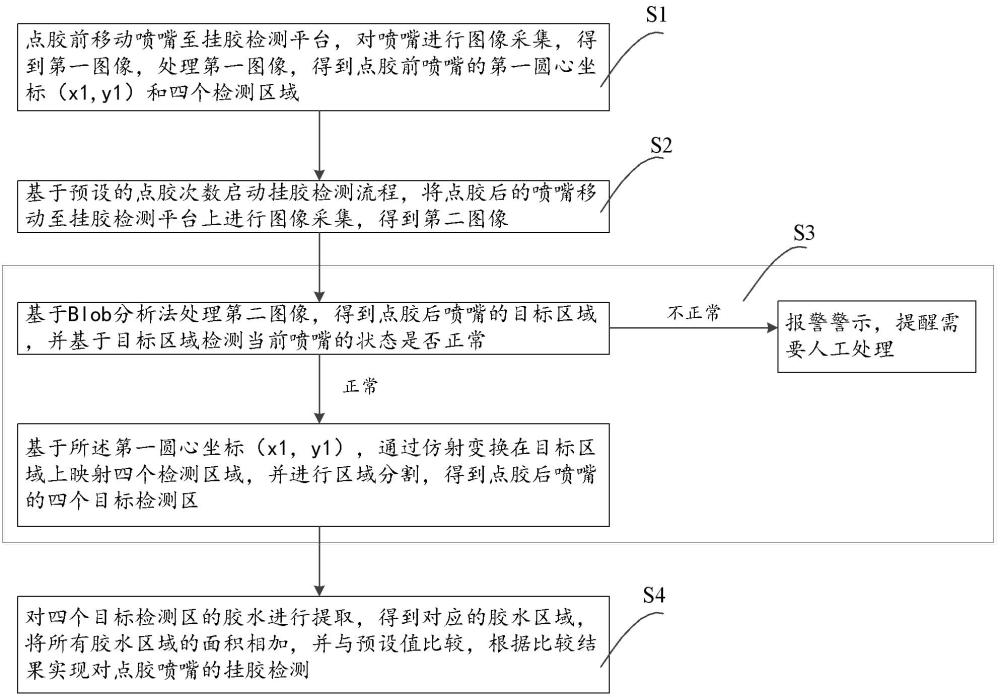
4、s1,點膠前移動噴嘴至掛膠檢測平臺,對所述噴嘴進行圖像采集,得到第一圖像,處理所述第一圖像,得到點膠前噴嘴的第一圓心坐標(x1,y1)和四個檢測區(qū)域;
5、s2,基于預設的點膠次數(shù)啟動掛膠檢測流程,將點膠后的噴嘴移動至所述掛膠檢測平臺上進行圖像采集,得到第二圖像;
6、s3,基于blob分析法處理所述第二圖像,得到點膠后噴嘴的目標區(qū)域,并基于所述目標區(qū)域檢測當前噴嘴的狀態(tài)是否正常;
7、若當前噴嘴的狀態(tài)正常,則基于所述第一圓心坐標(x1,y1),通過仿射變換在所述目標區(qū)域上映射四個所述檢測區(qū)域,并進行區(qū)域分割,得到點膠后噴嘴的四個目標檢測區(qū),進入下一步,若當前噴嘴的狀態(tài)不正常,則報警警示,提醒需要人工處理;
8、s4,對四個所述目標檢測區(qū)的膠水進行提取,得到對應的膠水區(qū)域,將所有膠水區(qū)域的面積相加,并與預設值比較,根據比較結果實現(xiàn)對點膠噴嘴的掛膠檢測。
9、本發(fā)明的有益效果是,本發(fā)明的點膠噴嘴掛膠實時在線檢測方法,首先獲取點膠前噴嘴的圓心坐標和檢測區(qū)域,然后獲取點膠后的噴嘴圖像,處理點膠后的噴嘴圖像,并結合仿射變換技術得到目標檢測區(qū),對各個目標檢測區(qū)進行膠水提取,得到不同目標檢測區(qū)的膠水區(qū)域,再計算所有膠水區(qū)域的面積,基于所有膠水區(qū)域的面積對點膠噴嘴的進行掛膠檢測,噴嘴掛膠檢測的準確性高,且在保證檢測準確性的同時,能夠對四個目標檢測區(qū)的膠水一起提取,提高了檢測效率。另外,由于基于預設的點膠次數(shù)啟動掛膠檢測流程,能夠及時發(fā)現(xiàn)噴嘴掛膠,提高了點膠產品的良品率,并能夠更好的維護、監(jiān)視噴嘴使用的生命周期。
10、根據本發(fā)明一個實施例,在步驟s1中,通過blob分析法處理第一圖像,提取所述第一圓心坐標(x1,y1);
11、通過人機交互界面顯示第一圖像,并進行區(qū)域劃分,得到四個檢測區(qū)域,四個檢測區(qū)域分別為噴嘴端口區(qū)域、噴嘴側壁區(qū)域、噴嘴平面區(qū)域以及噴嘴超出平面區(qū)域。
12、根據本發(fā)明一個實施例,在所述步驟s3中,基于所述噴嘴的圓心坐標通過仿射變換在所述目標區(qū)域上映射四個所述檢測區(qū)域具體包括:
13、通過blob分析法處理第二圖像,提取點膠后噴嘴的圓心坐標(xi,yi);
14、基于所述第一圓心坐標(x1,y1)和點膠后噴嘴的圓心坐標(xi,yi)完成對第二圖像的定位;
15、將所述第一圓心坐標(x1,y1)映射到第二圖像中,得到掛膠檢測定位仿射變換矩陣,計算公式表示為:
16、
17、其中,旋轉矩陣r和平移向量t;
18、通過所述掛膠檢測定位仿射變換矩陣在所述目標區(qū)域上映射四個所述檢測區(qū)域,并進行區(qū)域分割,得到點膠后噴嘴的四個目標檢測區(qū),四個目標檢測區(qū)與四個檢測區(qū)域一一對應,分別為:噴嘴端口目標檢測區(qū)、噴嘴側壁目標檢測區(qū)、噴嘴平面目標檢測區(qū)以及噴嘴超出平面目標檢測區(qū)。
19、根據本發(fā)明一個實施例,所述步驟s4中對四個所述目標檢測區(qū)的膠水進行提取包括:對噴嘴端口目標檢測區(qū)的膠水提取、噴嘴側壁目標檢測區(qū)的膠水提取、噴嘴平面目標檢測區(qū)的膠水提取以及噴嘴超出平面目標檢測區(qū)的膠水提取。
20、根據本發(fā)明一個實施例,對所述噴嘴端口目標檢測區(qū)的膠水提取包括:
21、根據膠水的反射特性通過灰度閾值分割提取噴嘴端口的亮環(huán),基于所述亮環(huán)的圓度判斷所述噴嘴端口目標檢測區(qū)是否掛膠,若掛膠,則通過亮環(huán)外圍的膠水灰度值對所述噴嘴端口目標檢測區(qū)的膠水進行提取,得到第一膠水區(qū)域;
22、計算所述第一膠水區(qū)域的像素數(shù)量,得到第一膠水區(qū)域的面積。
23、根據本發(fā)明一個實施例,對所述噴嘴側壁目標檢測區(qū)的膠水提取包括:
24、通過動態(tài)閾值分割提取所述噴嘴側壁目標檢測區(qū)的暗色區(qū)域,并通過形態(tài)學操作處理所述暗色區(qū)域,處理后的所述暗色區(qū)域為第二膠水區(qū)域;或者
25、通過動態(tài)閾值分割提取所述噴嘴側壁目標檢測區(qū)的無膠水分布的區(qū)域,結合全局閾值分割和形態(tài)學操作連通所有無膠水的區(qū)域,然后將所有無膠水的區(qū)域與所述噴嘴側壁做差得到第二膠水區(qū)域;
26、計算所述第二膠水區(qū)域的像素數(shù)量,得到第二膠水區(qū)域的面積。
27、根據本發(fā)明一個實施例,對所述噴嘴平面目標檢測區(qū)的膠水提取以及所述噴嘴超出平面目標檢測區(qū)的膠水提取包括:
28、通過全局閾值分割分別提取噴嘴平面目標檢測區(qū)和噴嘴超出平面目標檢測區(qū)的亮色區(qū)域,得到第三膠水區(qū)域和第四膠水區(qū)域;
29、分別計算所述第三膠水區(qū)域和第四膠水區(qū)域的像素數(shù)量,得到第三膠水區(qū)域的面積和第四膠水區(qū)域的面積。
30、根據本發(fā)明一個實施例,若所有膠水區(qū)域的總面積大于預設值,則判斷當前噴嘴掛膠,進行報警警示,提示人工進行擦膠或控制擦膠單元進行擦膠。
31、根據本發(fā)明一個實施例,通過blob分析法處理第一圖像,提取所述第一圓心坐標(x1,y1)具體包括:
32、對所述第一圖像進行銳化處理,利用低通濾波對銳化后的圖像進行過濾;
33、對過濾后的圖像進行增強處理,得到增強圖像;
34、通過二值化處理所述增強圖像,得到最大的面積的區(qū)域;
35、通過形態(tài)學操作和區(qū)域形態(tài)操作對最大的面積的區(qū)域進行處理,得到目標區(qū)域;
36、計算所述目標區(qū)域的最大內切圓,并通過area_center算子獲取第一圓心坐標(x1,y1)。
37、根據本發(fā)明實施例的一種點膠噴嘴掛膠實時在線檢測系統(tǒng),所述系統(tǒng)包括:
38、掛膠檢測平臺,被配置為用于圖像采集;
39、上位機,所述上位機與所述掛膠檢測平臺連接,所述上位機被配置為執(zhí)行如上所述的點膠噴嘴掛膠實時在線檢測方法;
40、所述掛膠檢測平臺包括:工業(yè)相機、工業(yè)鏡頭、轉角棱鏡和環(huán)形無影光源;
41、所述工業(yè)相機、所述工業(yè)鏡頭以及所述轉角棱鏡依次同軸設置;
42、所述轉角棱鏡和所述環(huán)形無影光源相對設置;
43、點膠噴嘴掛膠實時在線檢測時,移動所述點膠噴嘴至所述環(huán)形無影光源上,使所述點膠噴嘴的軸線與所述環(huán)形無影光源的軸線在同一直線。
44、本發(fā)明的其他特征和優(yōu)點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本發(fā)明而了解。本發(fā)明的目的和其他優(yōu)點在說明書、權利要求書以及附圖中所特別指出的結構來實現(xiàn)和獲得。
45、為使本發(fā)明的上述目的、特征和優(yōu)點能更明顯易懂,下文特舉較佳實施例,并配合所附附圖,作詳細說明如下。
- 還沒有人留言評論。精彩留言會獲得點贊!