一種基于礦井環境監測的井下車輛路徑規劃方法與流程
本發明涉及井下車輛管理,具體涉及一種基于礦井環境監測的井下車輛路徑規劃方法。
背景技術:
1、在礦業開采中,井下車輛扮演著至關重要的角色,它們負責在狹窄、復雜且多變的井下環境中運輸礦石、物資及人員。然而,由于井下環境的特殊性,如空間受限、光線不足、地質條件復雜等,使得井下車輛的調度和路徑規劃成為一項極具挑戰性的任務。
2、井下車輛的種類繁多,包括礦用自卸車、電車、鏟運機等,它們承擔著礦石的采掘、運輸以及井下設備的搬運等任務。在井下,這些車輛需要在狹窄的巷道中穿梭,面對的是崎嶇不平的路面、復雜的地質構造以及隨時可能出現的突發狀況。并且由于井下空間有限,車輛行駛時往往需要頻繁避讓,這不僅降低了運輸效率,還增加了安全隱患。此外,井下光線不足,視線受限,駕駛員需要依靠車燈和經驗來判斷前方路況,這無疑增加了駕駛難度和事故風險。再者,井下地質條件復雜,可能存在塌方、透水等潛在危險,對車輛的性能和駕駛員的應變能力都提出了極高的要求。
3、面對井下車輛工作的種種挑戰,進行路徑規劃顯得尤為重要。路徑規劃是指根據井下環境的特點和車輛運輸的需求,為井下車輛規劃出一條最優的行駛路徑。這一規劃過程不僅考慮了路徑的最短距離,還綜合考慮了路況、突發情況、交通流量等多種因素,旨在實現運輸效率的最大化,同時確保安全。因此,如何設計一種井下車輛路徑規劃方法是亟需解決的技術問題。
技術實現思路
1、針對上述現有技術的不足,本發明所要解決的技術問題是:如何提供一種基于礦井環境監測的井下車輛路徑規劃方法,基于井下可用巷道信息進行路徑規劃,使得能夠適應井下復雜多變的環境;同時檢測井下車輛的行駛情況并在車輛偏航時重新進行路徑規劃,使得能夠靈活應對井下環境的突發變化,確保車輛始終能夠沿著最優路徑行駛,從而提高井下車輛路徑規劃的準確性和靈活性。
2、為了解決上述技術問題,本發明采用了如下的技術方案:
3、一種基于礦井環境監測的井下車輛路徑規劃方法,包括:
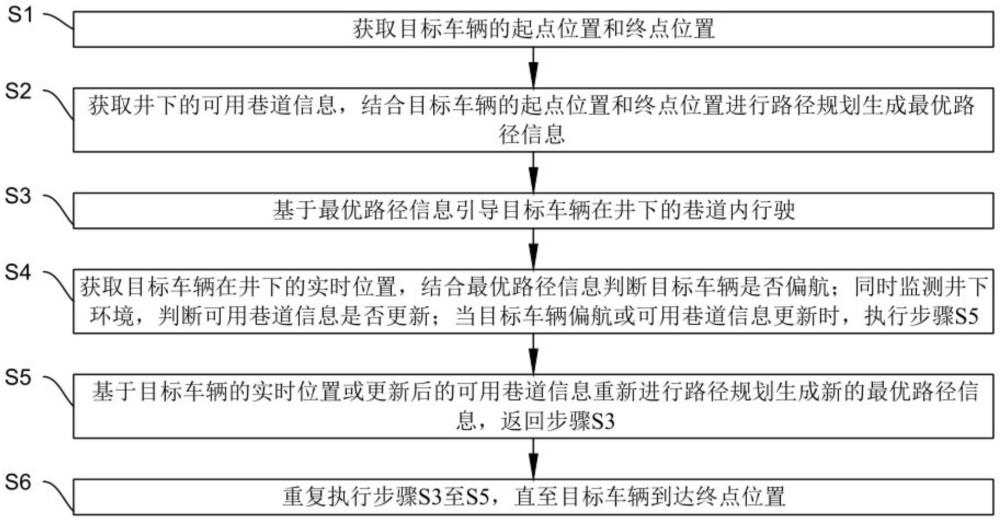
4、s1:獲取目標車輛的起點位置和終點位置;
5、s2:獲取井下的可用巷道信息,結合目標車輛的起點位置和終點位置進行路徑規劃生成最優路徑信息;
6、s3:基于最優路徑信息引導目標車輛在井下的巷道內行駛;
7、s4:獲取目標車輛在井下的實時位置,結合最優路徑信息判斷目標車輛是否偏航;同時監測井下環境,判斷可用巷道信息是否更新;當目標車輛偏航或可用巷道信息更新時,執行步驟s5;
8、s5:基于目標車輛的實時位置或更新后的可用巷道信息重新進行路徑規劃生成新的最優路徑信息,返回步驟s3;
9、s6:重復執行步驟s3至s5,直至目標車輛到達終點位置。
10、優選的,步驟s2中,最優路徑信息包括最少擁堵路徑、最短時間路徑、最少紅綠燈路徑和最短路程路徑中任意一項或多項。
11、優選的,步驟s2中,通過如下步驟生成最少擁堵路徑:
12、s201:基于目標車輛的起點位置和終點位置結合可用巷道信息生成若干條可達路徑;可達路徑由一條或多條巷道組合而成;
13、s202:獲取每條可達路徑上正在行駛車輛的車輛信息;
14、s203:基于每條可達路徑上正在行駛車輛的車輛信息計算對應的擁堵系數;
15、s204:選擇擁堵系數最小的可達路徑作為最少擁堵路徑。
16、優選的,步驟s203中,通過如下公式計算可達路徑的擁堵系數:
17、
18、式中:λj表示第j條可達路徑的擁堵系數;mj表示第j條可達路徑上與目標車輛同向行駛車輛的數量;lj表示目標車輛與第j條可達路徑上第一輛同向行駛車輛之間的距離;a為一個常數;ki表示第i個紅綠燈在當前時刻等待區中的實時車輛數量;ji表示第i個紅綠燈等待區的最大車輛容量;nj表示第j條可達路徑上紅綠燈的數量。
19、優選的,步驟s2中,通過如下步驟生成最短時間路徑:
20、s211:基于目標車輛的起點位置和終點位置結合可用巷道信息生成若干條可達路徑;可達路徑由一條或多條巷道組合而成;
21、s212:獲取每條可達路徑上正在行駛車輛的車輛信息;
22、s213:對于每條可達路徑,通過如下步驟計算目標車輛的行駛時間:
23、s2131:將可達路徑上距離目標車輛最近的同向行駛車輛作為參考車輛;
24、s2132:根據參考車輛的實時位置、終點位置和行駛速度計算其在當前可達路徑上的離開位置和離開時間;
25、s2133:根據目標車輛的起點位置和行駛速度計算其到達參考車輛離開位置的到達時間;
26、s2134:根據目標車輛的到達時間和參考車輛的離開時間判斷目標車輛是否出現跟車行為:若出現跟車行為,則執行步驟s2135;若不出現跟車行為,則該可達路徑上目標車輛的行駛時間=可達路徑的長度/目標車輛的行車速度;
27、s2135:根據目標車輛的起點位置和行車速度以及參考車輛的實時位置和行駛速度計算目標車輛與參考車輛的跟車開始位置;
28、s2136:根據目標車輛的起點位置和跟車開始位置之間的路程結合目標車輛的行車速度計算跟車開始時間t1;
29、s2137:根據跟車開始位置和參考車輛的離開位置之間的路程結合參考車輛的行駛速度計算跟車進行時間t2;
30、s2138:根據跟車開始位置與目標車輛的終點位置之間的路程結合目標車輛的行車速度計算剩余行駛時間t3;
31、s2139:該可達路徑上目標車輛的行駛時間=(t1+t2+t3)(1+λ);其中λ表示該可達路徑的擁堵系數;
32、s214:選擇目標車輛的行駛時間最短的可達路徑作為最短時間路徑。
33、優選的,步驟s2中,通過如下步驟生成最少紅綠燈路徑:
34、s221:基于目標車輛的起點位置和終點位置結合可用巷道信息生成若干條可達路徑;可達路徑由一條或多條巷道組合而成;
35、s222:獲取每條可達路徑上的紅綠燈數量;
36、s223:選擇紅綠燈數量最少的可達路徑作為最少紅綠燈路徑。
37、優選的,步驟s2中,通過迪杰斯特拉算法生成最短路程路徑;
38、迪杰斯特拉算法的處理步驟如下:
39、s231:基于井下所有巷道的連接關系及每條巷道的長度構建一個加權無向圖;加權無向圖中的節點代表巷道交叉口或關鍵點,邊代表巷道,邊的權重為巷道長度;
40、s232:創建包含所有節點的集合,將該集合分為未訪問節點集合和已訪問節點集合;
41、s233:為每個節點創建距離數組和前驅節點數組;距離數組用于記錄從起點位置到該節點的最短距離;前驅節點數組用于記錄路徑信息即每個節點的前驅節點;
42、s234:從未訪問節點集合中選取距離起點位置最近的節點作為當前節點,并將其從未訪問集合移動到已訪問集合;
43、s235:遍歷當前節點的所有鄰居節點;
44、s236:對于每個鄰居節點,計算通過當前節點到達該鄰居節點的路徑長度;如果這個新路徑長度小于鄰居節點當前記錄的最短路徑長度,則更新鄰居節點的最短路徑長度,并更新前驅節點為該當前節點;
45、s237:重復步驟s234至s236,到未訪問節點集合為空;
46、s238:從終點節點開始,通過前驅節點數組回溯直到到達起點位置,該回溯過程會記錄下路徑上的所有節點,形成從起點位置到終點位置的最短路徑;
47、s239:將形成的最短路徑作為最短路程路徑。
48、優選的,步驟s5中,將目標車輛的實時位置作為新的起點位置;基于目標車輛新的起點位置和原本的終點位置結合可用巷道信息重新進行路徑規劃生成新的最優路徑信息,并返回驟步驟s3。
49、優選的,步驟s5中,當目標車輛的駕駛員更改終點位置時,將目標車輛的實時位置作為新的起點位置,更改后的終點位置作為新的終點位置;基于目標車輛新的起點位置和終點位置結合可用巷道信息重新進行路徑規劃生成新的最優路徑信息,并返回驟步驟s3。
50、優選的,步驟s5中,當可用巷道信息更新時,將目標車輛的實時位置作為新的起點位置,更新后的可用巷道信息作為新的可用巷道信息;基于目標車輛新的起點位置和原來的終點位置結合新的可用巷道信息重新進行路徑規劃生成新的最優路徑信息,并返回驟步驟s3。
51、本發明中基于礦井環境監測的井下車輛路徑規劃方法與現有技術相比,具有如下有益效果:
52、本發明獲取井下的可用巷道信息并結合目標車輛的起點位置和終點位置進行路徑規劃生成最優路徑信息;同時實時獲取目標車輛的實時位置并判斷是否偏航,監測井下環境并判斷可用巷道信息是否更新,當車輛偏航或可用巷道信息更新時,能夠重新進行路徑規劃以繼續引導車輛。首先基于井下可用巷道信息的路徑規劃,相比傳統的靜態地圖規劃,更能適應井下復雜多變的環境,從而提高井下車輛路徑規劃的效率與準確性。其次基于最優路徑信息的引導,使得車輛能夠按照預定路線行駛,不僅能夠更快、更準確的到達終點位置,還避免了盲目探索或誤入危險區域的風險,從而提高井下車輛路徑規劃的安全性。最后通過實時獲取目標車輛的井下位置并與最優路徑信息進行比對,可以及時發現車輛是否偏離預定路線,并且通過監測井下環境,可以判斷可用巷道信息是否更新;同時當車輛偏航或可用巷道信息更新時,能夠基于車輛的實時位置或更新后的可用巷道信息重新進行路徑規劃生成新的最優路徑信息,這種動態調整能力使得路徑規劃方法,能夠靈活應對井下環境的突發變化(如駕駛員走錯路或更改終點位置、巷道封閉、障礙物出現等),確保車輛始終能夠沿著最優路徑行駛,從而提高井下車輛路徑規劃的準確性和靈活性。
- 還沒有人留言評論。精彩留言會獲得點贊!