一種機械手臂和機械設備的制作方法
本申請涉及機械傳送,特別是涉及一種機械手臂和機械設備。
背景技術:
1、在觸摸屏、顯示屏等面板器件生產過程中,通常采用機械手臂傳送,來把多個生產設備連接成整體的生產線。
2、相關技術中,為確保傳送物安全平穩輸送,往往需要在機械臂上開槽,以放置設有吸真空孔和真空輔助機構的吸真空裝置。然而,該方式存在一定弊端。在機械臂的上述開槽,會影響機械手臂的強度,導致其使用壽命變短,且維修時間長、難度大,直接影響生產效率和成本。
3、基于此,如何設計一種機械手臂,在確保傳送物安全平穩輸送的同時,不影響承載強度和使用壽命,成為亟待解決的問題。
技術實現思路
1、為了解決現有技術中存在的至少一個問題,本申請的目的在于提供一種機械手臂和機械設備,不僅能夠確保傳送物安全平穩輸送,而且不影響承載強度,有助于提高機械手臂的使用壽命,且維護操作便捷、耗時短,從而有利于提高生產效率、降低成本。
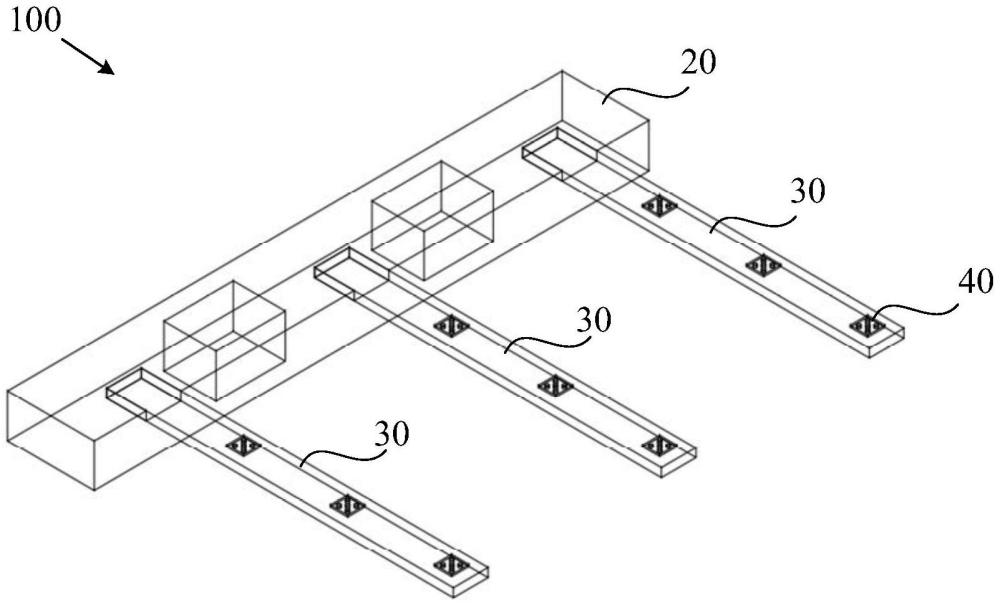
2、為實現上述目的,本申請提供的機械手臂,包括:
3、機械臂基座,用于固定機械臂,并攜載所述機械臂運動;
4、機械臂,一端固定在所述機械臂基座上,用于承載傳送物;
5、防滑承接塊,可拆卸連接在所述機械臂的上表面;所述防滑承接塊的上表面開設有凹槽;
6、防滑塊,包括定位部和凸出部;所述防滑塊通過所述定位部以過盈配合定位于所述凹槽中;所述凸出部凸出于所述防滑承接塊的上表面,用于支撐所述傳送物;且,所述防滑塊為采用彈性材料的防滑塊。
7、可選地,所述機械臂基座上的機械臂個數為至少一個;每個機械臂上的防滑承接塊的個數為至少三個;每個防滑承接塊上開設有至少三個凹槽,每個凹槽對應放置一個防滑塊。
8、可選地,所述防滑塊的主體輪廓呈球體或橢球體。
9、進一步可選地,所述防滑塊上切設有平臺結構;在承載狀態下,所述傳送物通過接觸所述平臺結構置于所述機械臂上。
10、進一步可選地,所述平臺結構的直徑范圍為0.1cm-0.5cm。
11、可選地,所述防滑塊的直徑范圍為2cm-10cm。
12、可選地,所述防滑承接塊通過卡扣連接或螺紋連接定位于所述機械臂的上表面。
13、可選地,所述彈性材料為橡膠材料;和/或,所述防滑承接塊為采用碳纖維材料的承接塊。
14、可選地,所述機械手臂為傳送顯示面板或顯示面板半成品的機械手臂。
15、為實現上述目的,本申請還提供的機械設備,包括:如上所述的機械手臂。
16、本申請的一種機械手臂和機械設備,通過防滑塊的定位部以過盈配合定位于凹槽中,凸出部凸出于防滑承接塊的上表面;并通過防滑承接塊與機械臂可拆卸連接,使得對防滑承接塊和防滑塊的維護操作便捷、耗時短,有利于提高生產效率、降低成本。
17、并且,該結構可確保整個機械手臂上的防滑塊凸出部的最高點處于同一個水平面或近似水平面上,機械手臂通過彈性防滑塊的凸出部,接觸傳送物的下表面,來承載該傳送物的傳輸。由此,能確保傳送物安全平穩輸送,且不需要在機械臂上額外開槽,從而不影響其承載強度,有助于提高機械手臂的使用壽命,有利于降低成本。
18、本申請的其他特征和優點將在隨后的說明書中闡述,并且,部分地從說明書中變得顯而易見,或者通過實施本申請而了解。
技術特征:
1.一種機械手臂,其特征在于,所述機械手臂,包括,
2.根據權利要求1所述的機械手臂,其特征在于,所述機械臂基座上的機械臂個數為至少一個;每個機械臂上的防滑承接塊的個數為至少三個;每個防滑承接塊上開設有至少三個凹槽,每個凹槽對應放置一個防滑塊。
3.根據權利要求1所述的機械手臂,其特征在于,所述防滑塊的主體輪廓呈球體或橢球體。
4.根據權利要求3所述的機械手臂,其特征在于,所述防滑塊上切設有平臺結構;在承載狀態下,所述傳送物通過接觸所述平臺結構置于所述機械臂上。
5.根據權利要求4所述的機械手臂,其特征在于,所述平臺結構的直徑范圍為0.1cm-0.5cm。
6.根據權利要求3所述的機械手臂,其特征在于,所述防滑塊的直徑范圍為2cm-10cm。
7.根據權利要求1所述的機械手臂,其特征在于,所述防滑承接塊通過卡扣連接或螺紋連接定位于所述機械臂的上表面。
8.根據權利要求1所述的機械手臂,其特征在于,所述彈性材料為橡膠材料;和/或,所述防滑承接塊為采用碳纖維材料的承接塊。
9.根據權利要求1-8任一項所述的機械手臂,其特征在于,所述機械手臂為傳送顯示面板或顯示面板半成品的機械手臂。
10.一種機械設備,其特征在于,所述機械設備,包括如權利要求1-9任一項所述的機械手臂。
技術總結
一種機械手臂和機械設備,機械手臂包括:機械臂基座,用于固定機械臂,并攜載機械臂運動;機械臂,一端固定在機械臂基座上,用于承載傳送物;防滑承接塊,可拆卸連接在機械臂的上表面;防滑承接塊的上表面開設有凹槽;防滑塊,包括定位部和凸出部;防滑塊通過定位部以過盈配合定位于凹槽中;凸出部凸出于防滑承接塊的上表面,用于支撐傳送物;防滑塊為采用彈性材料的防滑塊。本申請的機械手臂,不僅能夠確保傳送物安全平穩輸送,而且不影響承載強度,有助于提高機械手臂的使用壽命,且維護操作便捷、耗時短,從而有利于提高生產效率、降低成本。
技術研發人員:李思擁,曾一鑫,陳偉龍
受保護的技術使用者:信利光電股份有限公司
技術研發日:20240715
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!