一種半導體芯片真空焊接設備的制作方法
:本技術屬于半導體芯片生產,特別涉及一種半導體芯片真空焊接設備。
背景技術
0、
背景技術:
1、半導體芯片生產過程中,需要將電路焊接在芯片表面,焊接通常采用真空焊接技術,將芯片放入加熱裝置中,在真空環境下加熱,完成芯片電路的焊接,減少了芯片焊接面的空洞率。
2、現在有半導體芯片焊接工藝中,芯片需要放置在上、下載具之間,然后進入加熱裝置加熱焊接,焊接完成后還需要從上、下載具之間將芯片取出,芯片的放入和取出一般都是采用人工操作,勞動強度大,生產效率低,如何設計一種能夠自動上、下料的真空焊接設備是需要解決的問題。
3、公開于該背景技術部分的信息僅僅旨在增加對本實用新型的總體背景的理解,而不應當被視為承認或以任何形式暗示該信息構成已為本領域一般技術人員所公知的現有技術。
技術實現思路
0、
技術實現要素:
1、本實用新型的目的在于提供一種半導體芯片真空焊接設備,從而克服上述現有技術中的缺陷。
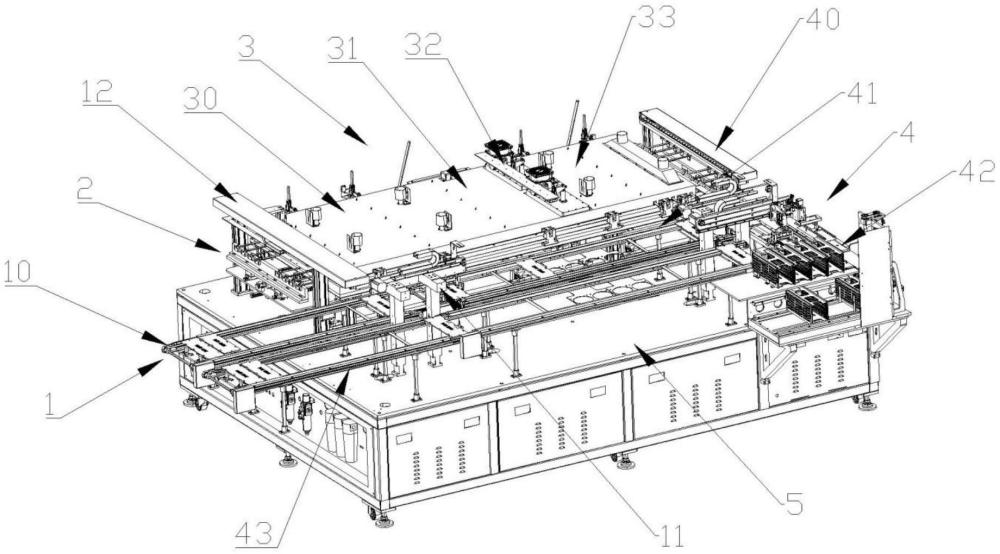
2、為實現上述目的,本實用新型提供了一種半導體芯片真空焊接設備,包括上料模塊、移栽模塊、真空焊接模塊、下料模塊;所述上料模塊、移栽模塊、真空焊接模塊、下料模塊均設置在機架臺面上;所述上料模塊與移栽模塊連接,用于上、下載具的合模和芯片的上料;所述移栽模塊設置在真空焊接模塊下方,用于帶動上、下載具和芯片通過真空焊接模塊;所述真空焊接模塊,用于對芯片進行加熱、在真空環境下進行焊接,并對焊接后的芯片進行冷卻;所述下料模塊設置在真空焊接模塊出口處,所述下料模塊與上料模塊連接,用于對上、下載具和芯片進行分離下料,回用上、下載具;所述上料模塊、移栽模塊、下料模塊形成循環通道,實現半導體芯片的真空焊接和上、下載具的循環。
3、優選地,技術方案中,上料模塊包括下載具傳動機構、上載具機夾取機構、合模上料夾取機構,下載具傳動機構末端分別設置有上載具機夾取機構、合模上料夾取機構,其中上載具機夾取機構與下載具傳動機構平行設置,合模上料夾取機構與下載具傳動機構垂直設置;下載具傳動機構包括第一輸送帶,第一輸送帶末端作為合模工位;上載具機夾取機構包括第一支架、第一伺服電機、第一導軌、第一滑塊、第一氣缸夾爪,第一支架設置在下載具傳動機構一側,第一支架上設置有第一伺服電機、第一導軌,第一導軌上設置有第一滑塊,第一伺服電機與第一滑塊通過傳動帶連接,第一滑塊上可升降地設置有第一氣缸夾爪,第一氣缸夾爪的移動軌跡位于合模工位與下料模塊之間;合模上料夾取機構包括第二支架、第二伺服電機、第二導軌、第二滑塊、第二氣缸夾爪,第二支架設置在真空焊接模塊進口一側,第二支架上設置有第二伺服電機、第二導軌,第二導軌上設置有第二滑塊,第二伺服電機與第二滑塊通過傳動帶連接,第二滑塊上設置有第二氣缸夾爪,第二氣缸夾爪的移動軌跡位于合模工位與真空焊接模塊進口之間。
4、優選地,技術方案中,移栽模塊包括移栽單元,移栽單元對稱設置在真空焊接模塊下方;移栽單元包括升降機構、底板、第三伺服電機、第三導軌、移動板、移栽桿,升降機構設置在真空焊接模塊下方,升降機構上設置有底板,底板上設置有第三伺服電機、第三導軌,移動板設置在第三導軌上,第三伺服電機通過滾珠絲杠與移動板連接,移動板上設置有移栽桿,移栽桿經真空焊接模塊進口延伸至真空焊接模塊內部;兩移栽單元的移栽桿之間留有空隙;通過第三伺服電機帶動移栽桿在真空焊接模塊內移動,進而帶動上、下載具和芯片移動;通過升降機構調整移栽桿高度,保證移栽桿回退時不帶動上、下載具和芯片移動。
5、優選地,技術方案中,真空焊接模塊包括預熱區、保溫區、真空焊接區、冷卻區、電加熱器、上真空腔體、下真空腔體、水冷機構,預熱區、保溫區內設置有電加熱器,真空焊接區內設置有上真空腔體、下真空腔體,上真空腔體與外部真空發生器連接,上真空腔體可升降地設置在機架臺面上,上真空腔體內設置有密封圈,上真空腔體與下真空腔體閉合時通過密封圈密封,冷卻區內設置有水冷機構;預熱區、保溫區、真空焊接區、冷卻區內均充氮氣保護;兩移栽單元的移栽桿分別延伸至真空焊接區,兩移栽桿之間留有空隙。
6、優選地,技術方案中,下料模塊包括合模下料夾取機構、上載具回用傳動機構、芯片下料機構、下載具回用傳動機構、下料輸送帶、第五支架,合模下料夾取機構設置在真空焊接模塊出口側,合模下料夾取機構與下料輸送帶連接,下料輸送帶兩側分別設置有上載具回用傳動機構、芯片下料機構、下載具回用傳動機構,其中上載具回用傳動機構和下載具回用傳動機構位于同一側;合模下料夾取機構包括第四支架、第四伺服電機、第四導軌、第四滑塊、第四氣缸夾爪,第四支架設置在真空焊接模塊出口一側,第四支架上設置有第四伺服電機、第四導軌,第四導軌上設置有第四滑塊,第四伺服電機與第四滑塊通過傳動帶連接,第四滑塊上設置有第四氣缸夾爪,第四氣缸夾爪的移動軌跡位于真空焊接模塊出口與下料輸送帶初始端之間;上載具回用傳動機構包括第五伺服電機、第五導軌、第五滑塊、第五氣缸夾爪、第二輸送帶,第五伺服電機、第五導軌設置在第五支架上,第五滑塊設置在第五導軌上,第五伺服電機與第五滑塊通過傳動帶連接,第五滑塊上設置有第五氣缸夾爪,第二輸送帶與下料輸送帶垂直設置,第五氣缸夾爪的移動軌跡位于下料輸送帶與第二輸送帶上;下載具回用傳動機構包括第六伺服電機、第六導軌、第六滑塊、第六氣缸夾爪、第三輸送帶,第六伺服電機、第六導軌設置在第五支架上,第六滑塊設置在第六導軌上,第六伺服電機與第六滑塊通過傳動帶連接,第六滑塊上設置有第六氣缸夾爪,第三輸送帶與下料輸送帶垂直設置,第三輸送帶與第一輸送帶連接,第六氣缸夾爪的移動軌跡位于下料輸送帶與第三輸送帶上;芯片下料機構包括第七氣缸夾爪、第四輸送帶、下料架,第七氣缸夾爪設置在第六滑塊上,第四輸送帶與下料輸送帶平行設置,第四輸送帶與下料架連接,第七氣缸夾爪的移動軌跡位于下料輸送帶與第四輸送帶上。
7、與現有技術相比,本實用新型具有如下有益效果:
8、通過上料模塊、移栽模塊、下料模塊相配合,代替人工對芯片進行上下料,實現芯片自動上下料,上、下載具回用,大大降低了勞動強度,提高了生產效率。
技術特征:
1.一種半導體芯片真空焊接設備,其特征在于:包括上料模塊、移栽模塊、真空焊接模塊、下料模塊;所述上料模塊、移栽模塊、真空焊接模塊、下料模塊均設置在機架臺面上;所述上料模塊與移栽模塊連接,用于上、下載具的合模和芯片的上料;所述移栽模塊設置在真空焊接模塊下方,用于帶動上、下載具和芯片通過真空焊接模塊;所述真空焊接模塊,用于對芯片進行加熱、在真空環境下進行焊接,并對焊接后的芯片進行冷卻;所述下料模塊設置在真空焊接模塊出口處,所述下料模塊與上料模塊連接,用于對上、下載具和芯片進行分離下料,回用上、下載具;所述上料模塊、移栽模塊、下料模塊形成循環通道。
2.根據權利要求1所述的半導體芯片真空焊接設備,其特征在于:上料模塊包括下載具傳動機構、上載具機夾取機構、合模上料夾取機構,下載具傳動機構末端分別設置有上載具機夾取機構、合模上料夾取機構,其中上載具機夾取機構與下載具傳動機構平行設置,合模上料夾取機構與下載具傳動機構垂直設置;下載具傳動機構包括第一輸送帶,第一輸送帶末端作為合模工位;上載具機夾取機構包括第一支架、第一伺服電機、第一導軌、第一滑塊、第一氣缸夾爪,第一支架設置在下載具傳動機構一側,第一支架上設置有第一伺服電機、第一導軌,第一導軌上設置有第一滑塊,第一伺服電機與第一滑塊通過傳動帶連接,第一滑塊上可升降地設置有第一氣缸夾爪,第一氣缸夾爪的移動軌跡位于合模工位與下料模塊之間;合模上料夾取機構包括第二支架、第二伺服電機、第二導軌、第二滑塊、第二氣缸夾爪,第二支架設置在真空焊接模塊進口一側,第二支架上設置有第二伺服電機、第二導軌,第二導軌上設置有第二滑塊,第二伺服電機與第二滑塊通過傳動帶連接,第二滑塊上設置有第二氣缸夾爪,第二氣缸夾爪的移動軌跡位于合模工位與真空焊接模塊進口之間。
3.根據權利要求2所述的半導體芯片真空焊接設備,其特征在于:移栽模塊包括移栽單元,移栽單元對稱設置在真空焊接模塊下方;移栽單元包括升降機構、底板、第三伺服電機、第三導軌、移動板、移栽桿,升降機構設置在真空焊接模塊下方,升降機構上設置有底板,底板上設置有第三伺服電機、第三導軌,移動板設置在第三導軌上,第三伺服電機通過滾珠絲杠與移動板連接,移動板上設置有移栽桿,移栽桿經真空焊接模塊進口延伸至真空焊接模塊內部;兩移栽單元的移栽桿之間留有空隙;通過第三伺服電機帶動移栽桿在真空焊接模塊內移動,進而帶動上、下載具和芯片移動;通過升降機構調整移栽桿高度,保證移栽桿回退時不帶動上、下載具和芯片移動。
4.根據權利要求3所述的半導體芯片真空焊接設備,其特征在于:真空焊接模塊包括預熱區、保溫區、真空焊接區、冷卻區、電加熱器、上真空腔體、下真空腔體、水冷機構,預熱區、保溫區內設置有電加熱器,真空焊接區內設置有上真空腔體、下真空腔體,上真空腔體與外部真空發生器連接,上真空腔體可升降地設置在機架臺面上,上真空腔體內設置有密封圈,上真空腔體與下真空腔體閉合時通過密封圈密封,冷卻區內設置有水冷機構;預熱區、保溫區、真空焊接區、冷卻區內均充氮氣保護;兩移栽單元的移栽桿分別延伸至真空焊接區,兩移栽桿之間留有空隙。
5.根據權利要求4所述的半導體芯片真空焊接設備,其特征在于:下料模塊包括合模下料夾取機構、上載具回用傳動機構、芯片下料機構、下載具回用傳動機構、下料輸送帶、第五支架,合模下料夾取機構設置在真空焊接模塊出口側,合模下料夾取機構與下料輸送帶連接,下料輸送帶兩側分別設置有上載具回用傳動機構、芯片下料機構、下載具回用傳動機構,其中上載具回用傳動機構和下載具回用傳動機構位于同一側;合模下料夾取機構包括第四支架、第四伺服電機、第四導軌、第四滑塊、第四氣缸夾爪,第四支架設置在真空焊接模塊出口一側,第四支架上設置有第四伺服電機、第四導軌,第四導軌上設置有第四滑塊,第四伺服電機與第四滑塊通過傳動帶連接,第四滑塊上設置有第四氣缸夾爪,第四氣缸夾爪的移動軌跡位于真空焊接模塊出口與下料輸送帶初始端之間;上載具回用傳動機構包括第五伺服電機、第五導軌、第五滑塊、第五氣缸夾爪、第二輸送帶,第五伺服電機、第五導軌設置在第五支架上,第五滑塊設置在第五導軌上,第五伺服電機與第五滑塊通過傳動帶連接,第五滑塊上設置有第五氣缸夾爪,第二輸送帶與下料輸送帶垂直設置,第五氣缸夾爪的移動軌跡位于下料輸送帶與第二輸送帶上;下載具回用傳動機構包括第六伺服電機、第六導軌、第六滑塊、第六氣缸夾爪、第三輸送帶,第六伺服電機、第六導軌設置在第五支架上,第六滑塊設置在第六導軌上,第六伺服電機與第六滑塊通過傳動帶連接,第六滑塊上設置有第六氣缸夾爪,第三輸送帶與下料輸送帶垂直設置,第三輸送帶與第一輸送帶連接,第六氣缸夾爪的移動軌跡位于下料輸送帶與第三輸送帶上;芯片下料機構包括第七氣缸夾爪、第四輸送帶、下料架,第七氣缸夾爪設置在第六滑塊上,第四輸送帶與下料輸送帶平行設置,第四輸送帶與下料架連接,第七氣缸夾爪的移動軌跡位于下料輸送帶與第四輸送帶上。
技術總結
本技術公開了一種半導體芯片真空焊接設備。包括上料模塊、移栽模塊、真空焊接模塊、下料模塊;所述上料模塊、移栽模塊、真空焊接模塊、下料模塊均設置在機架臺面上;所述上料模塊與移栽模塊連接,用于上、下載具的合模和芯片的上料;所述移栽模塊設置在真空焊接模塊下方,用于帶動上、下載具和芯片通過真空焊接模塊;所述真空焊接模塊,用于對芯片進行加熱、在真空環境下進行焊接,并對焊接后的芯片進行冷卻;所述下料模塊設置在真空焊接模塊出口處,所述下料模塊與上料模塊連接,用于對上、下載具和芯片進行分離下料,回用上、下載具;所述上料模塊、移栽模塊、下料模塊形成循環通道。本技術大大降低了勞動強度,提高了生產效率。
技術研發人員:于永皞,黃二州,高翔
受保護的技術使用者:無錫固翌智能科技有限公司
技術研發日:20240626
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!