一種加速踏板零位自學習方法、車輛及存儲介質與流程
本發明涉及車輛,具體涉及一種加速踏板零位自學習方法、車輛及存儲介質。
背景技術:
1、加速踏板信號解析是車輛識別駕駛員駕駛意圖的關鍵步驟。在車輛的使用過程中,隨著加速踏板被操作次數的增加,加速踏板零位信號出現偏移的可能性越大,最終導致加速踏板信號解析結果出現偏差。于是就有技術提出加速踏板零位自學習方法來緩解上述的問題,然而現有技術中的加速踏板零位自學習方法通常存在以下技術問題:零位電壓自學習結果不夠準確,加速踏板零位自學習頻率過高。
技術實現思路
1、本發明的目的是提出一種加速踏板零位自學習方法、車輛及存儲介質,以減輕或消除至少一個上述的技術問題。
2、本發明所述的一種加速踏板零位自學習方法,包括以下步驟:
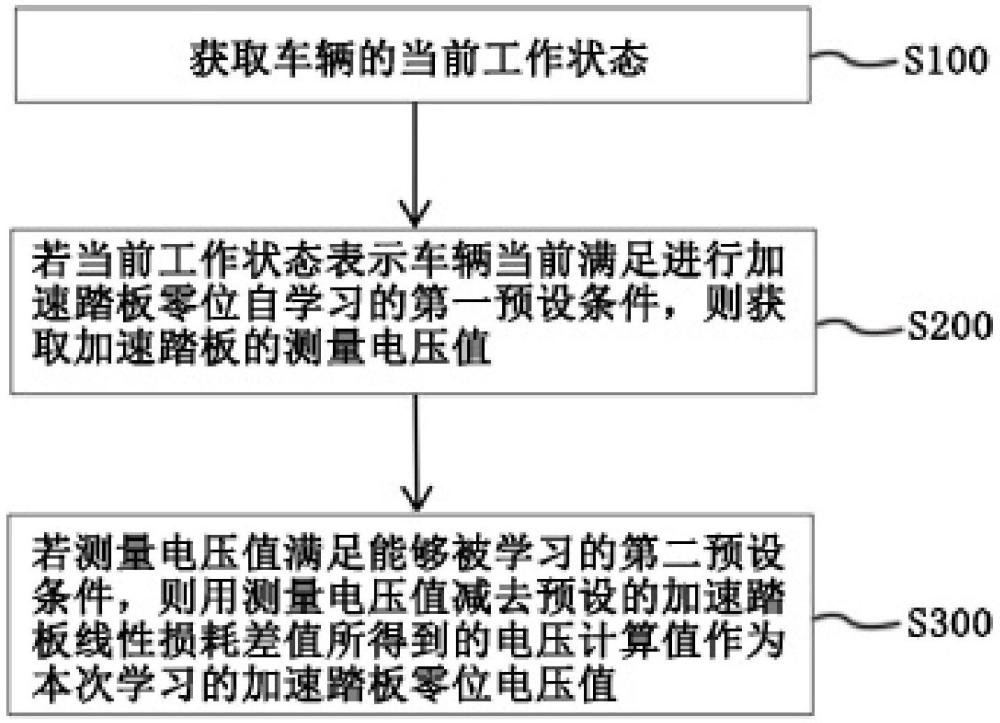
3、獲取車輛的當前工作狀態;
4、若所述當前工作狀態表示所述車輛當前滿足進行加速踏板零位自學習的第一預設條件,則獲取所述加速踏板的測量電壓值;
5、若所述測量電壓值滿足第二預設條件,則用所述測量電壓值減去預設的加速踏板線性損耗差值所得到的電壓計算值作為本次學習的加速踏板零位電壓值。
6、可選的,所述第一預設條件包括:所述車輛處于停車狀態,所述加速踏板未被踩下,所述加速踏板當前的零點位置小于上一次學習的零點位置。
7、可選的,所述測量電壓值包括第一回路電壓值和第二回路電壓值,所述第二預設條件包括第一子條件,所述第一子條件包括:所述第一回路電壓值在有效范圍內,當前加速踏板線性度在預設范圍內,所述第一回路電壓值與所述第二回路電壓值之間的誤差小于理論誤差。
8、可選的,所述預設范圍的下限為:(第一回路滿開度最小有效電壓值-第一回路零位最大有效電壓值)/100%,所述預設范圍的上限為:(第一回路滿開度最大有效電壓值-第一回路零位最小有效電壓值)/100%,所述當前加速踏板線性度為:(第一回路滿開度最小有效電壓值-所述第一回路電壓值)/100%。
9、可選的,所述本次學習的加速踏板零位電壓值為所述第一回路電壓值減去預設的加速踏板線性損耗差值所得到的電壓計算值。
10、可選的,所述第二預設條件還包括第二子條件,所述第二子條件為滿足所述第一子條件的持續時間大于預設時間。
11、可選的,加速踏板零位自學習方法還包括以下步驟:當所述車輛下電時,存儲所述電壓計算值。
12、可選的,加速踏板零位自學習方法還包括以下步驟:當所述車輛再次上電時,以所述電壓計算值作為加速踏板零位電壓值計算加速踏板開度。
13、本發明還提出了一種車輛,包括:存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時,能夠實現上述任一項所述的加速踏板零位自學習方法。
14、本發明還提出了一種存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時,能夠實現如上述任一項所述的加速踏板零位自學習方法。
15、本發明能夠降低加速踏板零位自學習的頻率,能夠提升加速踏板零位電壓自學習結果的準確度。
技術特征:
1.一種加速踏板零位自學習方法,其特征在于,包括以下步驟:
2.根據權利要求1所述的加速踏板零位自學習方法,其特征在于,所述第一預設條件包括:所述車輛處于停車狀態,所述加速踏板未被踩下,所述加速踏板當前的零點位置小于上一次學習的零點位置。
3.根據權利要求1所述的加速踏板零位自學習方法,其特征在于,所述測量電壓值包括第一回路電壓值和第二回路電壓值,所述第二預設條件包括第一子條件,所述第一子條件包括:所述第一回路電壓值在有效范圍內,當前加速踏板線性度在預設范圍內,所述第一回路電壓值與所述第二回路電壓值之間的誤差小于理論誤差。
4.根據權利要求3所述的加速踏板零位自學習方法,其特征在于,所述預設范圍的下限為:(第一回路滿開度最小有效電壓值-第一回路零位最大有效電壓值)/100%,所述預設范圍的上限為:(第一回路滿開度最大有效電壓值-第一回路零位最小有效電壓值)/100%,所述當前加速踏板線性度為:(第一回路滿開度最小有效電壓值-所述第一回路電壓值)/100%。
5.根據權利要求3所述的加速踏板零位自學習方法,其特征在于,所述本次學習的加速踏板零位電壓值為所述第一回路電壓值減去預設的加速踏板線性損耗差值所得到的電壓計算值。
6.根據權利要求3所述的加速踏板零位自學習方法,其特征在于,所述第二預設條件還包括第二子條件,所述第二子條件為滿足所述第一子條件的持續時間大于預設時間。
7.根據權利要求1所述的加速踏板零位自學習方法,其特征在于,還包括以下步驟:當所述車輛下電時,存儲所述電壓計算值。
8.根據權利要求7所述的加速踏板零位自學習方法,其特征在于,還包括以下步驟:當所述車輛再次上電時,以所述電壓計算值作為加速踏板零位電壓值計算加速踏板開度。
9.一種車輛,其特征在于,包括存儲器、處理器及存儲在所述存儲器上并可在所述處理器上運行的計算機程序,所述處理器執行所述計算機程序時,能夠實現如權利要求1-8任一項所述的加速踏板零位自學習方法。
10.一種存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時,能夠實現如權利要求1-8任一項所述的加速踏板零位自學習方法。
技術總結
本發明涉及一種加速踏板零位自學習方法,包括以下步驟:獲取車輛的當前工作狀態;若當前工作狀態表示車輛當前滿足進行加速踏板零位自學習的第一預設條件,則獲取加速踏板的測量電壓值;若測量電壓值滿足第二預設條件,則用測量電壓值減去預設的加速踏板線性損耗差值所得到的電壓計算值作為本次學習的加速踏板零位電壓值。本發明還提出了一種車輛。本發明還提出了一種存儲介質。本發明能夠降低加速踏板零位自學習的頻率,能夠提升加速踏板零位電壓自學習結果的準確度。
技術研發人員:馮佳,嚴欽山
受保護的技術使用者:深藍汽車科技有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!