方向盤力反饋方法及裝置與流程
本申請屬于車輛,尤其涉及一種方向盤力反饋方法及裝置。
背景技術:
1、隨著汽車行業的發展,汽車轉向系統也隨之經歷了一個發展過程,汽車轉向系統最初采用純機械轉向,然后到液壓助力轉向,再到電子助力轉向,再到線控轉向。
2、線控轉向系統使用兩個電機代替車輛方向盤與車輪之間的機械連接,電機之間通過線束相連,既提高了汽車轉向性能,也提高了車輛發生事故時的被動安全性。力反饋方向盤是線控轉向系統的重要組成部分。
3、相關技術中,在向方向盤進行力反饋時,力反饋大小主要由基本力反饋和路感反饋組成,其中,路感反饋主要取決于轉向齒條力的大小。正常情況下,車輛的轉向齒條力能很好地反映車輛轉彎時的轉向負載;但當車輛啟動四輪獨立驅動功能時,不均勻分配的驅動扭矩會改變轉向齒條力大小,使得基于轉向齒條力的力反饋無法正常體現車輛狀態,這樣會使駕駛員對車輛當前狀態產生誤判,進而可能采取不必要的激進行為(例如,猛打方向盤或急剎車)危害駕駛安全。
技術實現思路
1、本申請實施例提供一種方向盤力反饋方法及裝置,能夠保障駕駛安全。
2、第一方面,本申請實施例提供一種方向盤力反饋方法,包括:
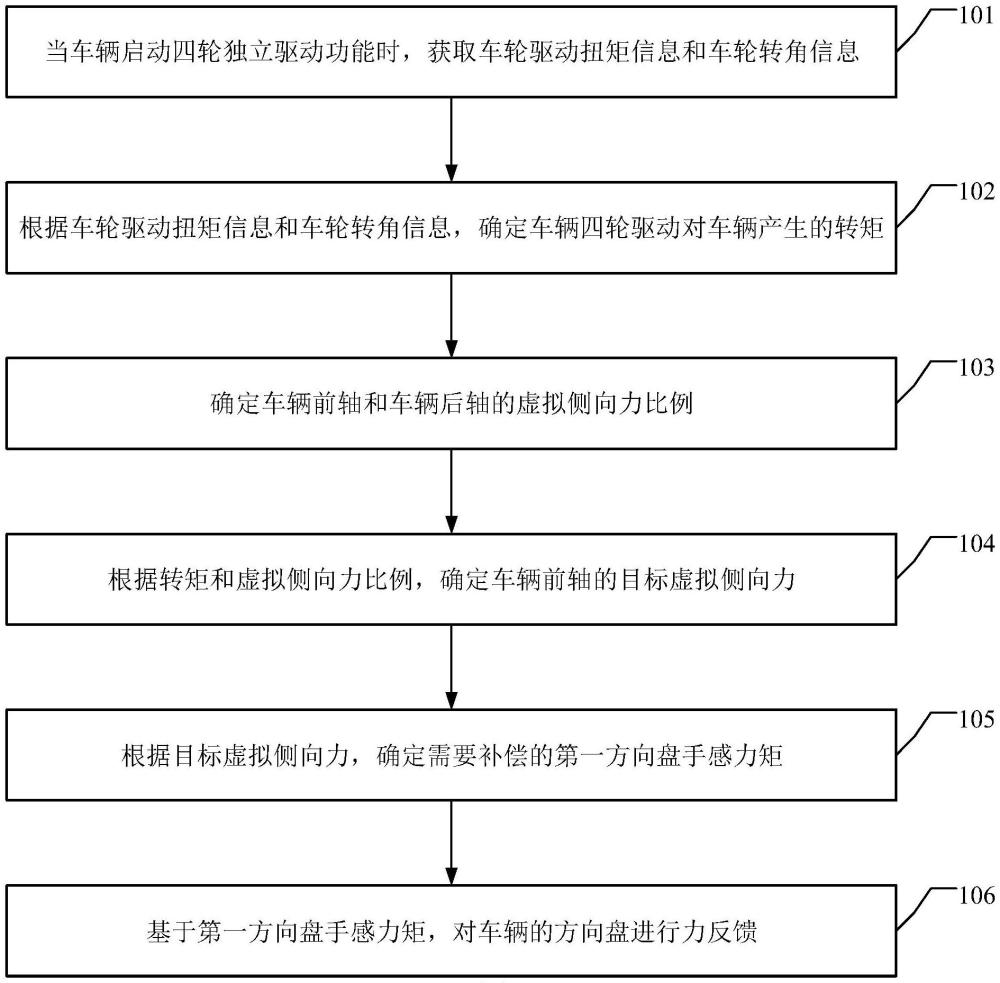
3、當車輛啟動四輪獨立驅動功能時,獲取車輪驅動扭矩信息和車輪轉角信息;
4、根據車輪驅動扭矩信息和車輪轉角信息,確定車輛四輪驅動對車輛產生的轉矩;
5、確定車輛前軸和車輛后軸的虛擬側向力比例;
6、根據轉矩和虛擬側向力比例,確定車輛前軸的目標虛擬側向力;
7、根據目標虛擬側向力,確定需要補償的第一方向盤手感力矩;
8、基于第一方向盤手感力矩,對車輛的方向盤進行力反饋。
9、第二方面,本申請實施例提供一種方向盤力反饋裝置,包括:
10、獲取模塊,用于當車輛啟動四輪獨立驅動功能時,獲取車輪驅動扭矩信息和車輪轉角信息;
11、第一確定模塊,用于根據車輪驅動扭矩信息和車輪轉角信息,確定車輛四輪驅動對車輛產生的轉矩;
12、第二確定模塊,用于確定車輛前軸和車輛后軸的虛擬側向力比例;
13、第三確定模塊,用于根據轉矩和虛擬側向力比例,確定車輛前軸的目標虛擬側向力;
14、第四確定模塊,用于根據目標虛擬側向力,確定需要補償的第一方向盤手感力矩;
15、力反饋模塊,用于基于第一方向盤手感力矩,對車輛的方向盤進行力反饋。
16、第三方面,本申請實施例提供一種電子設備,所述電子設備包括:處理器以及存儲有計算機程序指令的存儲器;所述處理器執行所述計算機程序指令時實現本申請實施例提供的方向盤力反饋方法的步驟。
17、第四方面,本申請實施例提供一種計算機可讀存儲介質,所述計算機可讀存儲介質上存儲有計算機程序指令,所述計算機程序指令被處理器執行時實現本申請實施例提供的方向盤力反饋方法的步驟。
18、第五方面,本申請實施例提供一種計算機程序產品,所述計算機程序產品包括計算機程序指令,所述計算機程序指令被處理器執行時實現本申請實施例提供的方向盤力反饋方法的步驟。
19、第六方面,本申請實施例提供一種車輛,包括以下至少一項:
20、本申請實施例提供的方向盤力反饋裝置;
21、本申請實施例提供的電子設備;
22、本申請實施例提供的計算機可讀存儲介質。
23、在本申請實施例中,當車輛啟動四輪獨立驅動功能時,通過獲取車輪驅動扭矩信息和車輪轉角信息;根據車輪驅動扭矩信息和車輪轉角信息,確定車輛四輪驅動對車輛產生的轉矩;確定車輛前軸和車輛后軸的虛擬側向力比例;根據轉矩和虛擬側向力比例,確定車輛前軸的目標虛擬側向力;根據目標虛擬側向力,確定需要補償的第一方向盤手感力矩;基于第一方向盤手感力矩,對車輛的方向盤進行力反饋。如此,方向盤駕駛手感能夠正確反饋車輛當前狀態,降低駕駛員做出錯誤操作危害駕駛安全的風險,能夠保障駕駛安全。并且,方向盤駕駛手感符合駕駛員的駕駛習慣,使駕駛員更容易接受線控轉向系統和四輪獨立驅動功能,減少駕駛員對操作習慣的抗拒感。
技術特征:
1.一種方向盤力反饋方法,其特征在于,所述方法包括:
2.根據權利要求1所述的方法,其特征在于,所述根據所述車輪驅動扭矩信息和所述車輪轉角信息,確定車輛四輪驅動對所述車輛產生的轉矩,包括:
3.根據權利要求2所述的方法,其特征在于,所述根據每個車輪的縱向驅動力和轉角,計算每個車輪的縱向力矩,包括:
4.根據權利要求2所述的方法,其特征在于,所述根據每個車輪的縱向力矩,確定車輛四輪驅動對所述車輛產生的轉矩,包括:
5.根據權利要求1所述的方法,其特征在于,所述確定車輛前軸和車輛后軸的虛擬側向力比例,包括:
6.根據權利要求1所述的方法,其特征在于,所述確定車輛前軸和車輛后軸的虛擬側向力比例,包括:
7.根據權利要求1所述的方法,其特征在于,所述根據所述轉矩和所述虛擬側向力比例,確定車輛前軸的目標虛擬側向力,包括:
8.根據權利要求1所述的方法,其特征在于,所述根據所述目標虛擬側向力,確定需要補償的第一方向盤手感力矩,包括:
9.根據權利要求1所述的方法,其特征在于,所述基于所述第一方向盤手感力矩,對所述車輛的方向盤進行力反饋,包括:
10.一種方向盤力反饋裝置,其特征在于,所述裝置包括:
技術總結
本申請公開了一種方向盤力反饋方法及裝置,涉及車輛技術領域。方向盤力反饋方法包括:當車輛啟動四輪獨立驅動功能時,獲取車輪驅動扭矩信息和車輪轉角信息;根據車輪驅動扭矩信息和車輪轉角信息,確定車輛四輪驅動對車輛產生的轉矩;確定車輛前軸和車輛后軸的虛擬側向力比例;根據轉矩和虛擬側向力比例,確定車輛前軸的目標虛擬側向力;根據目標虛擬側向力,確定需要補償的第一方向盤手感力矩;基于第一方向盤手感力矩,對車輛的方向盤進行力反饋。通過本申請提供的方案,能夠保障駕駛安全。
技術研發人員:張子彧,宗必寰,任敏,張佳雯
受保護的技術使用者:經緯恒潤(天津)研究開發有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!