極板生產或鍛造工藝生產用步進梁搬運裝置的制作方法
本發明涉及鍛造設備相關的,尤其是涉及一種極板生產或鍛造工藝生產用步進梁搬運裝置。
背景技術:
1、極板是由活性物質和支撐及導電用的“集電體”組成的片狀多孔體。極板生產的工藝流程主要包括材料準備、?成型和分割?、?鍍鎳處理?、?精細加工?等步驟。其中極板的?成型由沖壓成形設備制備完成。
2、鍛造是一種借助鍛壓機械對金屬坯料施壓,促使其塑性變形,進而獲取具備特定機械性能、形狀與尺寸鍛件的加工手段。鍛造的工藝流程涵蓋坯料準備,即依據鍛件要求選材料并加工成坯料,涉及下料、加熱等;鍛造加工,即將加熱坯料置于設備上,控制鍛造比、溫度、速度等參數使其塑性變形;后續處理,包括冷卻、切邊、沖孔、校正,以及可能的熱處理、表面處理,以此改善性能與表面質量。鍛造工藝廣泛應用于機械制造、汽車工業、航空航天等領域,對保障各行業關鍵零部件性能和質量起著關鍵作用。
3、步進梁是極板生產和鍛造自動化生產和中搬運坯料的關鍵設備。其通常由伺服電機或液壓系統驅動,工作時,伺服電機或液壓系統驅動驅動兩側的橫梁,使橫梁上設置的夾鉗能夾緊坯料,并提升、移送坯料,之后再由伺服電機或液壓系統驅動,實現放下坯料、松開夾鉗的動作,循環作業。
4、傳統的鍛造生產線,大部分為多臺單獨壓力機、多人單獨人工生產,生產效率低、設備占地大;
5、基于該缺陷,現有技術提出專利cn216575372u,公開了一種伺服同步驅動的十軸自動搬運裝置,其依靠伺服電機的同步控制,可同時夾取各工位的產品,實現產品在模具內的自動搬運,減少人員參與和操作強度,生產效率成倍提高。
6、但是該方案具有新的缺陷:
7、一是該搬運裝置的驅動模組之間還設置了傳動環節,使結構較復雜,且動能損失大;
8、二是該搬運裝置只在兩個橫梁的同一側設置了用于移送胚料的驅動模組,另一側則是用鉸接的方式,導致移送胚料的精度低、生產節拍慢;
9、三是在搬運胚料的過程中,如果生產節拍出現誤差,那步進梁可能會與鍛造生產線上的其它結構發生干涉,如果干涉強度較大則會損壞步進梁或其它結構。
技術實現思路
1、本發明旨在至少解決現有技術中存在的技術問題之一。為此,本發明的一個目的在于提出一種極板生產或鍛造工藝生產用步進梁搬運裝置。
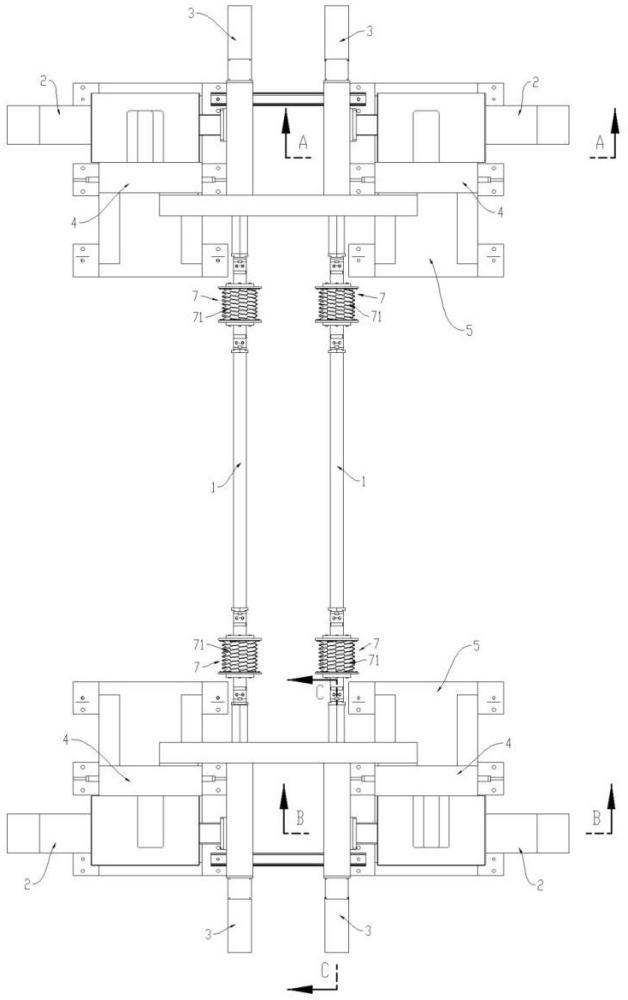
2、根據本發明提出的極板生產或鍛造工藝生產用步進梁搬運裝置,其包括平行設置的步進梁和位于每個步進梁端部的驅動機構,每個驅動機構均包括x向驅動機構、y向驅動機構和z向驅動機構,x向驅動機構、y向驅動機構和z向驅動機構合作用以驅動對應的步進梁產生三維方向的往復運動;
3、具體的,步進梁搬運裝置的步進梁一般為兩個,兩個步進梁之間平行設置,且兩個步進梁的中部設置有夾爪,x向驅動機構控制兩個步進梁相向運動時,可通過夾爪夾取胚料,控制兩個步進梁背向運動時,可放下胚料,y向驅動機構控制兩個步進梁的前后位移運動,用以完成移送胚料和作業和復位的作業,z向驅動機構控制兩個步進梁的上下位移運動,也用以完成移送胚料和作業和復位的作業;
4、與傳統步進梁搬運裝置不同的是:本搬運裝置還包括相對于步進梁固定設置的架體,z向驅動機構包括與架體固定連接的z向軌道和與z向軌道滑動連接的z向位移板,z向位移板由z向滾珠絲杠副和z向伺服電機驅動;
5、x向驅動機構包括與z向位移板固定連接的x向軌道,以及與x向軌道滑動連接的x向位移板,x向位移板由x向滾珠絲杠副和x向伺服電機驅動;
6、y向驅動機構包括與x向位移板固定連接的y向軌道,以及與y向軌道滑動連接的y向位移板,以及由y向滾珠絲杠副和y向伺服電機驅動的y向套筒,y向位移板連接y向套筒,且y向套筒的一端連接步進梁的端部;
7、如此設置的驅動機構,z向驅動機構直接與x向驅動機構實現連接,x向驅動機構直接與y向驅動機構實現連接,三者之間沒有傳動環節,結構簡單且傳動效率高;
8、另外,每個驅動機構均包括x向驅動機構、y向驅動機構和z向驅動機構,則兩個步進梁對應了十二個驅動機構,從而十二個伺服電機同步直驅,保證了搬運動作的同步性,提高了作業精度,又方便各軸的獨立調整。
9、在本發明的一些示例中,搬運裝置還包括驅動機構殼體,驅動機構殼體與架體固定連接,x向驅動機構和z向驅動機構均置于驅動機構殼體內;
10、如此設置的目的在于:將x向驅動機構和z向驅動機構封閉于驅動機構的殼體中,避免各機構暴露在外部而進入灰塵,同時殼體作為各結構的支撐部件。
11、在本發明的一些示例中,z向伺服電機固定的安裝于驅動機構殼體內,其輸出端連接z向滾珠絲杠副的絲杠,z向滾珠絲杠副的螺母固定連接z向位移板,即z向位移板通過z向滾珠絲杠副的傳動作用由z向伺服電機直接驅動作業。
12、在本發明的一些示例中,驅動機構殼體內還固定的設置有氣缸,氣缸的輸出端固定連接z向位移板,其中氣缸的作用是對z向位移板進行導向,避免其出現歪斜。
13、在本發明的一些示例中,x向伺服電機固定的安裝于驅動機構殼體內,其輸出端連接x向滾珠絲杠副的絲杠,x向滾珠絲杠副的螺母固定連接x向位移板,即x向位移板通過x向滾珠絲杠副的傳動作用由x向伺服電機直接驅動作業。
14、在本發明的一些示例中,x向位移板延伸出驅動機構殼體外,與y向軌道之間通過板體連接,y向伺服電機固定連接在板體上,其輸出端連接y向滾珠絲杠副的絲杠,y向滾珠絲杠副的螺母連接y向套筒,且y向套筒與y向位移板之間固定連接;
15、如此設置的目的在于:板體可將y向驅動機構包裹,將其封閉,同時,y向套筒通過y向滾珠絲杠副的傳動作用由y向伺服電機直接驅動作業。
16、在本發明的一些示例中,y向套筒與步進梁的端部之間還設置有柔性機構,柔性機構包括分別與y向套筒、步進梁的端部相對連接的連接節,連接節包括具有球狀體的母節和具有球狀槽的公節,使部分球狀體能容納在球狀槽內做任意方向的轉動,母節與公節之間還通過第一彈性體連接;
17、如此設置的目的在于:當驅動機構的精度下降導致步進梁的生產節拍落后,或其它意外情況導致步進梁與鍛造生產線上的其它結構發生輕微的干涉時,柔性機構可使步進梁的作業過程能接受該部分的干涉,或者說通過步進梁的輕微錯位而化解該部分的干涉,從而避免因干涉造成的設備的磨損甚至損壞;
18、在此過程中,連接節可使步進梁與驅動機構之間能產生幾乎任意方向的錯位,而第一彈性體則能限制該錯位,使步進梁在正常情況下能保持與y向套筒同軸而進行正常的作業,同時第一彈性體還能限制錯位的程度,避免步進梁的過度錯位而導致的生產節拍錯亂,再者,第一彈性體還具有使步進梁復位的功能。
19、在本發明的一些示例中,第一彈性體包括若干第一柱形彈簧,若干第一柱形彈簧整體呈環形的沿著連接節的周向分布,每個第一柱形彈簧的兩端分別與母節、公節連接;
20、如此設置的目的在于:前述的連接節雖然能產生幾乎任意方向的錯位,但步進梁相對于y向套筒也能產生轉動,周向分布的第一柱形彈簧能對該轉動進行限位,避免步進梁隨意扭轉。
21、在本發明的一些示例中,第一彈性體還包括若干第二柱形彈簧,若干第二柱形彈簧整體呈環形的沿著連接節的周向分布,置于若干第一柱形彈簧的內側,每個第二柱形彈簧的兩端分別與母節、公節連接,每個第一柱形彈簧的延伸方向均相對于連接節的軸向傾斜,每個第二柱形彈簧的延伸方向均相對于連接節的軸向傾斜,該傾斜方向與第一柱形彈簧的傾斜方向相反。
22、如此設置的目的在于:設置呈環形分布的的兩組柱形彈簧,能加強彈性體的作用,對步進梁產生較為穩定的拉緊作業,防止步進梁在正常作業下晃動,同時,相對于連接節的軸向傾斜設置的柱形彈簧能進一步的避免步進梁相對于y向套筒發生扭轉,呈相反方向傾斜布設的第一柱形彈簧和第二柱形彈簧則能在正時針方向和反時針方向上均限制步進梁的扭轉,進一步的增加連接節的穩定性,盡可能的防止步進梁在在正常運轉下發生錯位或扭轉。
23、在本發明的一些示例中,球狀體的端部與球狀槽之間還形成用以容納第二彈性體的空間,使第二彈性體的兩端分別抵接在球狀體與球狀槽之間;
24、如此設置的目的在于:該空間為步進梁的軸向竄動預留出位置,同樣用以適應意外的干涉情況,第二彈性體則用以抵抗步進梁的竄動,而步進梁在干涉作用下發生竄動時,第二彈性體的反彈作用又用以使步進梁復位。
25、本發明的附加方面和優點將在下面的描述中部分給出,部分將從下面的描述中變得明顯,或通過本發明的實踐了解到。
- 還沒有人留言評論。精彩留言會獲得點贊!