一種緩沖塊測試臺架補償降噪方法及系統(tǒng)與流程
本發(fā)明屬于噪聲控制,具體涉及一種緩沖塊測試臺架補償降噪方法及系統(tǒng)。
背景技術(shù):
1、隨著新能源汽車和智能駕駛技術(shù)的快速發(fā)展,汽車懸架系統(tǒng)的性能測試要求日益嚴苛。緩沖塊作為懸架系統(tǒng)中的關(guān)鍵部件,其動態(tài)特性(如剛度、阻尼、疲勞壽命)的測試精度直接影響整車的nvh(噪聲、振動與聲振粗糙度)性能。然而,傳統(tǒng)的緩沖塊測試臺架在降噪技術(shù)上面臨以下關(guān)鍵問題:主動降噪系統(tǒng)的實時性缺陷:部分高端臺架引入了基于lms(最小均方)算法的主動降噪技術(shù),但其固定步長設(shè)計存在固有矛盾,為保持穩(wěn)定性,步長通常較小,導致算法收斂時間長,無法跟蹤瞬態(tài)沖擊噪聲(如緩沖塊碰撞產(chǎn)生的脈寬<5ms的噪聲),且在復雜工況下,降噪效果隨測試時間延長顯著衰減。多物理場耦合噪聲的識別盲區(qū):緩沖塊測試過程中,機械振動、液壓脈動、電磁干擾等多物理場噪聲相互耦合,而現(xiàn)有系統(tǒng)常采用單一傳感器(如僅加速度計或麥克風)進行噪聲分析。環(huán)境擾動下的性能漂移:測試臺架在長時間運行或溫差變化時,機械結(jié)構(gòu)的熱膨脹/收縮會改變信號傳遞路徑,導致時滯參數(shù)漂移。現(xiàn)有系統(tǒng)缺乏動態(tài)補償機制,可能導致降噪性能衰減。
技術(shù)實現(xiàn)思路
1、為解決現(xiàn)有技術(shù)中存在的上述問題,本發(fā)明提供了一種緩沖塊測試臺架補償降噪方法及系統(tǒng)。
2、本發(fā)明的目的可以通過以下技術(shù)方案實現(xiàn):
3、一種緩沖塊測試臺架補償降噪方法,所述緩沖塊測試臺架補償降噪方法的實施包括以下步驟:
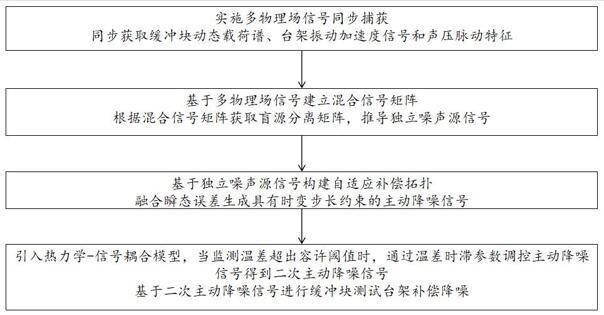
4、實施多物理場信號同步捕獲,同步獲取緩沖塊動態(tài)載荷譜、臺架振動加速度信號和聲壓脈動特征;
5、基于所述多物理場信號建立混合信號矩陣,根據(jù)所述混合信號矩陣獲取盲源分離矩陣,推導獨立噪聲源信號;
6、基于所述獨立噪聲源信號構(gòu)建自適應補償拓撲,融合瞬態(tài)誤差生成具有時變步長約束的主動降噪信號;
7、引入熱力學-信號耦合模型,當監(jiān)測溫差超出容許閾值時,通過溫差時滯參數(shù)調(diào)控所述主動降噪信號得到二次主動降噪信號,基于所述二次主動降噪信號進行緩沖塊測試臺架補償降噪。
8、優(yōu)選的,所述獨立噪聲源信號的推導包括:
9、構(gòu)建盲源分離目標函數(shù);
10、迭代優(yōu)化所述盲源分離目標函數(shù)達到最小值,得到分離矩陣,基于所述分離矩陣和所述混合信號矩陣得到所述盲源分離矩陣y=wx=[y1,y2,…,yn],分離出n個獨立的噪聲源信號,其中,x為混合信號矩陣,w為分離矩陣。
11、優(yōu)選的,所述盲源分離目標函數(shù)的表達式為,其中,w為分離矩陣,e為期望,pi為第i個噪聲源信號的概率密度函數(shù),yi為第i個噪聲源信號,n為噪聲源個數(shù)。
12、優(yōu)選的,所述主動降噪信號的生成包括:
13、捕獲瞬態(tài)誤差信號e(n)并計算時變步長因子;
14、根據(jù)所述獨立噪聲源信號統(tǒng)計易噪點位得到模態(tài)振型函數(shù),并記錄固有頻率,基于所述模態(tài)振型函數(shù)和所述固有頻率生成結(jié)構(gòu)補償信號,所述結(jié)構(gòu)補償信號的數(shù)學描述為,其中,m為易噪點位個數(shù),為位置x處的第m階模態(tài)振型函數(shù),為位置y處的第m階模態(tài)振型函數(shù),ωm為第m階固有頻率,ω為外部激勵頻率,j為虛數(shù)單位,為模態(tài)阻尼比;
15、基于所述結(jié)構(gòu)補償信號生成所述主動降噪信號。
16、優(yōu)選的,所述時變步長因子的計算公式為,其中,為最小步長,為最大步長,α為步長調(diào)節(jié)靈敏度系數(shù),基于所述時變步長因子約束主動降噪信號的步長。
17、優(yōu)選的,所述主動降噪信號的表達式為,其中,fcomp(t)為t時刻的主動降噪信號,φ為噪聲信號的角頻率,為結(jié)構(gòu)補償信號的幅值,為結(jié)構(gòu)補償信號的相位角。
18、優(yōu)選的,所述二次主動降噪信號的獲取包括:
19、預設(shè)基準溫度,獲取實時溫度,基于所述實時溫度和所述基準溫度的差值得到所述監(jiān)測溫差,獲取主動降噪信號傳遞路徑長度、材料熱膨脹系數(shù)和信號傳播速率并計算線性溫度系數(shù);
20、獲取所述基準溫度下的初始溫差時滯,基于所述初始溫差時滯和所述線性溫度系數(shù)計算所述溫差時滯參數(shù);
21、基于所述溫差時滯參數(shù)調(diào)控所述主動降噪信號得到所述二次主動降噪信號,數(shù)學描述為,其中,為二次主動降噪信號,為溫差時滯參數(shù)。
22、優(yōu)選的,所述線性溫度系數(shù)的計算公式為,其中,為線性溫度系數(shù),為材料熱膨脹系數(shù),l0為主動降噪信號傳遞路徑長度,v為信號傳播速率。
23、優(yōu)選的,所述溫差時滯參數(shù)的計算公式為,其中,為溫差時滯參數(shù),為初始溫差時滯,為t時刻的監(jiān)測溫差。
24、一種緩沖塊測試臺架補償降噪系統(tǒng),用于執(zhí)行上述所述的緩沖塊測試臺架補償降噪方法,包括信號捕獲模塊、噪聲源分離模塊、主動降噪模塊和二次補償模塊;
25、所述信號捕獲模塊用于實施多物理場信號同步捕獲,同步獲取緩沖塊動態(tài)載荷譜、臺架振動加速度信號和聲壓脈動特征;
26、所述噪聲源分離模塊用于基于所述多物理場信號建立混合信號矩陣,根據(jù)所述混合信號矩陣獲取盲源分離矩陣,推導獨立噪聲源信號;
27、所述主動降噪模塊用于基于所述獨立噪聲源信號構(gòu)建自適應補償拓撲,融合瞬態(tài)誤差生成具有時變步長約束的主動降噪信號;
28、所述二次補償模塊用于引入熱力學-信號耦合模型,當監(jiān)測溫差超出容許閾值時,通過溫差時滯參數(shù)調(diào)控所述主動降噪信號得到二次主動降噪信號,基于所述二次主動降噪信號進行緩沖塊測試臺架補償降噪。
29、本發(fā)明的有益效果為:
30、(1)通過時變步長因子進行噪聲控制的步長調(diào)節(jié),實現(xiàn)沖擊噪聲下的小步長防抖與穩(wěn)態(tài)噪聲下的大步長快速跟蹤。
31、(2)分離機械振動、液壓脈動、電磁干擾等多個相互耦合的多物理場噪聲,提升降噪精度。
32、(3)通過溫差時滯參數(shù)調(diào)控主動降噪信號,消除降噪過程中的溫差影響,降噪效果顯著提升。
技術(shù)特征:
1.一種緩沖塊測試臺架補償降噪方法,其特征在于,所述緩沖塊測試臺架補償降噪方法的實施包括以下步驟:
2.根據(jù)權(quán)利要求1所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述獨立噪聲源信號的推導包括:
3.根據(jù)權(quán)利要求2所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述盲源分離目標函數(shù)的表達式為,其中,w為分離矩陣,e為期望,pi為第i個噪聲源信號的概率密度函數(shù),yi為第i個噪聲源信號,n為噪聲源個數(shù)。
4.根據(jù)權(quán)利要求1所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述主動降噪信號的生成包括:
5.根據(jù)權(quán)利要求4所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述時變步長因子的計算公式為,其中,為最小步長,為最大步長,α為步長調(diào)節(jié)靈敏度系數(shù),基于所述時變步長因子約束主動降噪信號的步長。
6.根據(jù)權(quán)利要求5所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述主動降噪信號的表達式為,其中,fcomp(t)為t時刻的主動降噪信號,φ為噪聲信號的角頻率,為結(jié)構(gòu)補償信號的幅值,為結(jié)構(gòu)補償信號的相位角。
7.根據(jù)權(quán)利要求1所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述二次主動降噪信號的獲取包括:
8.根據(jù)權(quán)利要求7所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述線性溫度系數(shù)的計算公式為,其中,為線性溫度系數(shù),為材料熱膨脹系數(shù),l0為主動降噪信號傳遞路徑長度,v為信號傳播速率。
9.根據(jù)權(quán)利要求8所述的緩沖塊測試臺架補償降噪方法,其特征在于,所述溫差時滯參數(shù)的計算公式為,其中,為溫差時滯參數(shù),為初始溫差時滯,為t時刻的監(jiān)測溫差。
10.一種緩沖塊測試臺架補償降噪系統(tǒng),其特征在于,所述系統(tǒng)應用于如權(quán)利要求1-9中任一所述的緩沖塊測試臺架補償降噪方法,包括信號捕獲模塊、噪聲源分離模塊、主動降噪模塊和二次補償模塊;
技術(shù)總結(jié)
本發(fā)明涉及一種緩沖塊測試臺架補償降噪方法及系統(tǒng),屬噪聲控制領(lǐng)域。其中,該方法包括實施多物理場信號同步捕獲,同步獲取緩沖塊動態(tài)載荷譜、臺架振動加速度信號和聲壓脈動特征;基于多物理場信號建立混合信號矩陣,根據(jù)混合信號矩陣獲取盲源分離矩陣,推導獨立噪聲源信號;基于獨立噪聲源信號構(gòu)建自適應補償拓撲,融合瞬態(tài)誤差生成具有時變步長約束的主動降噪信號;引入熱力學?信號耦合模型,當監(jiān)測溫差超出容許閾值時,通過溫差時滯參數(shù)調(diào)控主動降噪信號得到二次主動降噪信號,基于二次主動降噪信號進行緩沖塊測試臺架補償降噪。本發(fā)明實現(xiàn)了通過時變步長和溫差時滯參數(shù)調(diào)控噪聲補償過程,噪聲控制效率更高,效果顯著。
技術(shù)研發(fā)人員:吳仍廣,郝明,任紅桃
受保護的技術(shù)使用者:拾音汽車科技(上海)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!