基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法與流程
本發(fā)明涉及線路風(fēng)偏舞動監(jiān)測,具體涉及基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法。
背景技術(shù):
1、目前,通常只依賴單一的激光傳感器或攝像設(shè)備來獲取線路的風(fēng)偏數(shù)據(jù)。在風(fēng)力較強或光照條件變化明顯的環(huán)境下,容易受到干擾,導(dǎo)致數(shù)據(jù)不穩(wěn)定,無法準(zhǔn)確捕捉線路的舞動幅度。此外,在復(fù)雜地形或長距離線路中,監(jiān)測設(shè)備的布設(shè)不當(dāng)可能導(dǎo)致數(shù)據(jù)采集盲區(qū),進(jìn)而造成無法全面捕獲線路風(fēng)偏舞動的情況,這使得線路風(fēng)偏舞動監(jiān)測存在滯后性,無法及時有效地做出響應(yīng),從而增加了線路故障的風(fēng)險。
2、現(xiàn)有技術(shù)存在著線路風(fēng)偏舞動監(jiān)測不可靠,準(zhǔn)確性低的技術(shù)問題。
技術(shù)實現(xiàn)思路
1、本申請?zhí)峁┝嘶诙嗥叫芯€激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,用于針對解決現(xiàn)有技術(shù)中線路風(fēng)偏舞動監(jiān)測不可靠,準(zhǔn)確性低的技術(shù)問題。
2、鑒于上述問題,本申請?zhí)峁┝嘶诙嗥叫芯€激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,所述方法包括:
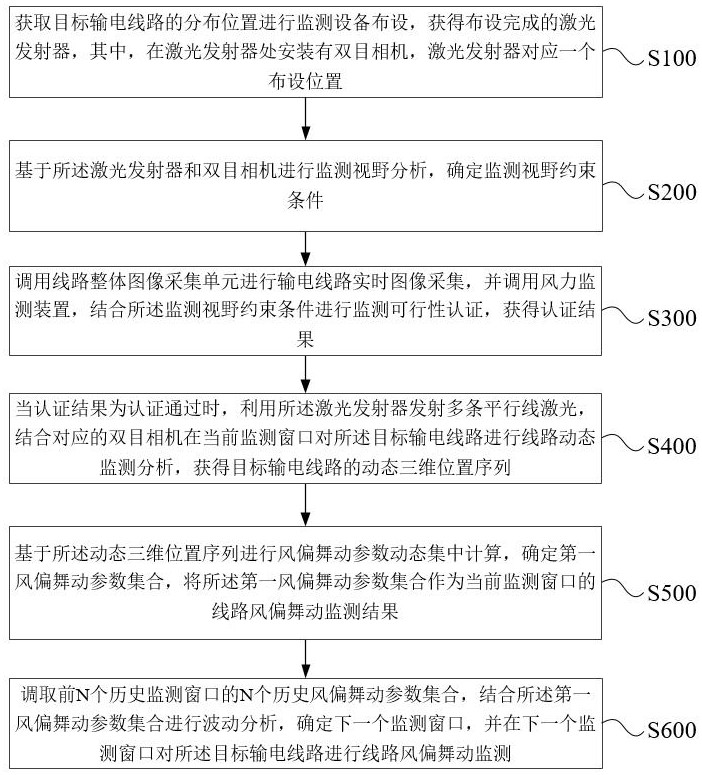
3、獲取目標(biāo)輸電線路的分布位置進(jìn)行監(jiān)測設(shè)備布設(shè),獲得布設(shè)完成的激光發(fā)射器,其中,在激光發(fā)射器處安裝有雙目相機,激光發(fā)射器對應(yīng)一個布設(shè)位置;
4、基于所述激光發(fā)射器和雙目相機進(jìn)行監(jiān)測視野分析,確定監(jiān)測視野約束條件;
5、調(diào)用線路整體圖像采集單元進(jìn)行輸電線路實時圖像采集,并調(diào)用風(fēng)力監(jiān)測裝置,結(jié)合所述監(jiān)測視野約束條件進(jìn)行監(jiān)測可行性認(rèn)證,獲得認(rèn)證結(jié)果;
6、當(dāng)認(rèn)證結(jié)果為認(rèn)證通過時,利用所述激光發(fā)射器發(fā)射多條平行線激光,結(jié)合對應(yīng)的雙目相機在當(dāng)前監(jiān)測窗口對所述目標(biāo)輸電線路進(jìn)行線路動態(tài)監(jiān)測分析,獲得目標(biāo)輸電線路的動態(tài)三維位置序列;
7、基于所述動態(tài)三維位置序列進(jìn)行風(fēng)偏舞動參數(shù)動態(tài)集中計算,確定第一風(fēng)偏舞動參數(shù)集合,將所述第一風(fēng)偏舞動參數(shù)集合作為當(dāng)前監(jiān)測窗口的線路風(fēng)偏舞動監(jiān)測結(jié)果;
8、調(diào)取前n個歷史監(jiān)測窗口的n個歷史風(fēng)偏舞動參數(shù)集合,結(jié)合所述第一風(fēng)偏舞動參數(shù)集合進(jìn)行波動分析,確定下一個監(jiān)測窗口,并在下一個監(jiān)測窗口對所述目標(biāo)輸電線路進(jìn)行線路風(fēng)偏舞動監(jiān)測。
9、本申請中提供的一個或多個技術(shù)方案,至少具有如下技術(shù)效果或優(yōu)點:
10、本申請通過獲取目標(biāo)輸電線路的分布位置進(jìn)行監(jiān)測設(shè)備布設(shè),獲得布設(shè)完成的激光發(fā)射器,其中,在激光發(fā)射器處安裝有雙目相機,激光發(fā)射器對應(yīng)一個布設(shè)位置,然后基于激光發(fā)射器和雙目相機進(jìn)行監(jiān)測視野分析,確定監(jiān)測視野約束條件,進(jìn)而調(diào)用線路整體圖像采集單元進(jìn)行輸電線路實時圖像采集,并調(diào)用風(fēng)力監(jiān)測裝置,結(jié)合監(jiān)測視野約束條件進(jìn)行監(jiān)測可行性認(rèn)證,獲得認(rèn)證結(jié)果,當(dāng)認(rèn)證結(jié)果為認(rèn)證通過時,利用激光發(fā)射器發(fā)射多條平行線激光,結(jié)合對應(yīng)的雙目相機在當(dāng)前監(jiān)測窗口對目標(biāo)輸電線路進(jìn)行線路動態(tài)監(jiān)測分析,獲得目標(biāo)輸電線路的動態(tài)三維位置序列,然后基于動態(tài)三維位置序列進(jìn)行風(fēng)偏舞動參數(shù)動態(tài)集中計算,確定第一風(fēng)偏舞動參數(shù)集合,將第一風(fēng)偏舞動參數(shù)集合作為當(dāng)前監(jiān)測窗口的線路風(fēng)偏舞動監(jiān)測結(jié)果,通過調(diào)取前n個歷史監(jiān)測窗口的n個歷史風(fēng)偏舞動參數(shù)集合,結(jié)合第一風(fēng)偏舞動參數(shù)集合進(jìn)行波動分析,確定下一個監(jiān)測窗口,并在下一個監(jiān)測窗口對目標(biāo)輸電線路進(jìn)行線路風(fēng)偏舞動監(jiān)測。達(dá)到了提高線路風(fēng)偏舞動監(jiān)測可靠性的技術(shù)效果。
技術(shù)特征:
1.基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,所述方法包括:
2.如權(quán)利要求1所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,基于所述激光發(fā)射器和雙目相機進(jìn)行監(jiān)測視野分析,確定監(jiān)測視野約束條件,包括:
3.如權(quán)利要求2所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,調(diào)用線路整體圖像采集單元進(jìn)行輸電線路實時圖像采集,并調(diào)用風(fēng)力監(jiān)測裝置,結(jié)合所述監(jiān)測視野約束條件進(jìn)行監(jiān)測可行性認(rèn)證,獲得認(rèn)證結(jié)果,包括:
4.如權(quán)利要求3所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,判斷所述風(fēng)力監(jiān)測特征是否滿足所述風(fēng)力監(jiān)測閾值,若是,則第二監(jiān)測可行性認(rèn)證結(jié)果為通過。
5.如權(quán)利要求1所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,基于所述動態(tài)三維位置序列進(jìn)行風(fēng)偏舞動參數(shù)動態(tài)集中計算,確定第一風(fēng)偏舞動參數(shù)集合,包括:
6.如權(quán)利要求5所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,包括:
7.如權(quán)利要求6所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,所述第一風(fēng)偏舞動參數(shù)集合包括風(fēng)偏角、舞動幅值、垂直舞動幅值、水平舞動幅值和橢圓傾斜角。
8.如權(quán)利要求1所述的基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,其特征在于,獲取目標(biāo)輸電線路的分布位置進(jìn)行監(jiān)測設(shè)備布設(shè),獲得布設(shè)完成的激光發(fā)射器,其中,在激光發(fā)射器處安裝有雙目相機,激光發(fā)射器對應(yīng)一個布設(shè)位置,包括:
技術(shù)總結(jié)
本發(fā)明公開了基于多平行線激光與雙目視覺的線路風(fēng)偏舞動監(jiān)測方法,涉及線路風(fēng)偏舞動監(jiān)測技術(shù)領(lǐng)域,該方法包括:獲取目標(biāo)輸電線路的分布位置進(jìn)行監(jiān)測設(shè)備布設(shè),獲得布設(shè)完成的激光發(fā)射器;確定監(jiān)測視野約束條件;進(jìn)行監(jiān)測可行性認(rèn)證,獲得認(rèn)證結(jié)果;獲得目標(biāo)輸電線路的動態(tài)三維位置序列;確定第一風(fēng)偏舞動參數(shù)集合,將第一風(fēng)偏舞動參數(shù)集合作為當(dāng)前監(jiān)測窗口的線路風(fēng)偏舞動監(jiān)測結(jié)果;確定下一個監(jiān)測窗口,并在下一個監(jiān)測窗口對目標(biāo)輸電線路進(jìn)行線路風(fēng)偏舞動監(jiān)測。本發(fā)明解決了現(xiàn)有技術(shù)中線路風(fēng)偏舞動監(jiān)測不可靠,準(zhǔn)確性低的技術(shù)問題,達(dá)到了提高線路風(fēng)偏舞動監(jiān)測準(zhǔn)確性和動態(tài)監(jiān)測的靈活性的技術(shù)效果。
技術(shù)研發(fā)人員:姜光,何成虎,李學(xué)鈞,戴相龍,王曉鵬,蔣勇
受保護(hù)的技術(shù)使用者:江蘇濠漢信息技術(shù)有限公司
技術(shù)研發(fā)日:
技術(shù)公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!