一種里程計參數在線標定方法及存儲介質與流程
本發明涉及測量,具體而言,涉及一種里程計參數在線標定方法及存儲介質。
背景技術:
1、由慣導、衛導、里程計和高程計組成的定位定向系統,通過多信息融合方式實現導航定位,為保證定位定向設備高精度姿態、速度和位置輸出,在使用前需完成里程計參數(標度因數誤差、航向安裝偏角、俯仰安裝偏角)標定。目前常用的定位定向系統里程計參數標定方法包括標志點(高精度位置基準、路標點)標定方法、濾波標定方法。對于標志點標定:高精度位置基準價格昂貴,路標點則存在被占用的風險;對于濾波標定法:需要建立復雜的濾波模型,模型不準確和外部信息不準確時標定效果不理想,且需進行一定的載體機動。
2、現有里程計標定技術,一種在定位定向系統完成初始對準后采用航位推算方法進行載體位置計算,載體行駛一段距離到達指定位置后,通過利用高精度位置基準或指定位置處的路標點位置值,利用相關計算方法完成里程計參數標定,這種方法存在成本高、位置基準系統拆裝耗時及路標位置受周邊環境影響等問題;一種是建立與里程計參數相關的濾波標定模型,通過引入外部信息及采用濾波技術實現里程計參數標定,該方法存在濾波模型建立不準確、外部信息不準確及調參周期長等問題。
技術實現思路
1、為解決背景技術中至少一個問題,本發明提供了一種里程計參數在線標定方法及存儲介質。
2、根據本發明的第一個方面,本發明提供一種里程計參數在線標定方法,包括如下步驟:
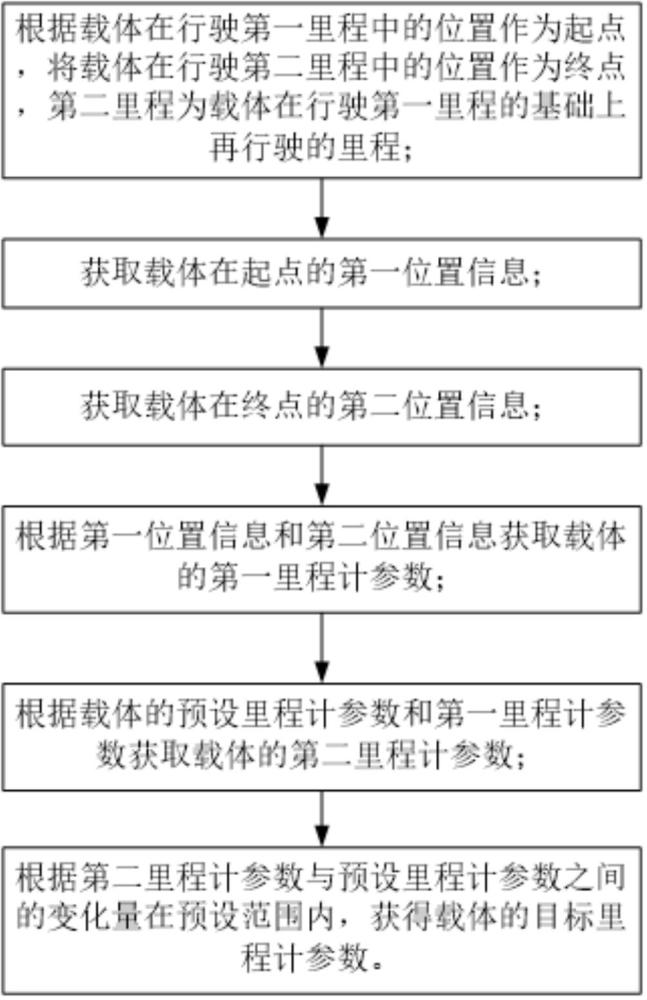
3、根據載體在行駛第一里程中的位置作為起點,將所述載體在行駛第二里程中的位置作為終點,所述第二里程為所述載體在行駛所述第一里程的基礎上再行駛的里程;
4、獲取所述載體在所述起點的第一位置信息,所述第一位置信息包括所述起點的第一衛導輸出位置、第一航位推算位置和所述起點相對于所述起點中的第一個起點的第一行駛路程;
5、獲取所述載體在所述終點的第二位置信息,所述第二位置信息包括所述終點的第二衛導輸出位置、第二航位推算位置和所述終點相對于所述起點中的所述第一個起點的第二行駛路程;
6、根據所述第一位置信息和所述第二位置信息獲取所述載體的第一里程計參數;
7、根據所述載體的預設里程計參數和所述第一里程計參數獲取所述載體的第二里程計參數;
8、根據所述第二里程計參數與所述預設里程計參數之間的變化量在預設范圍內,獲得所述載體的目標里程計參數。
9、根據本發明的一個實施例,所述載體在所述第一里程中有i個起點,其中i為自然數,i≥1;
10、所述載體在所述第二里程中有j個終點,其中j為自然數,j≥i;
11、i個所述起點中的里程均不一致;
12、j個所述終點中的里程均不一致。
13、根據本發明的一個實施例,i個所述起點中,相鄰的所述起點之間相隔的里程為c1;
14、j個所述終點中,相鄰的所述終點之間相隔的里程為c2;
15、其中c1和c2為自然數,c1>0,c2>0;
16、所述c2與所述c1一致或不一致。
17、根據本發明的一個實施例,根據所述載體相對于所述第一里程中的最后一個起點再行駛里程為c3,獲得所述第二里程中的第一個終點;
18、根據所述載體相對于所述第一個終點再行駛的里程中,獲取j個所述終點中的其它終點;
19、其中c3為自然數,c3>c1,且c3>c2。
20、根據本發明的一個實施例,所述衛導輸出位置包括第一經度、第一緯度和第一高度;所述航位推算位置包括第二經度、第二緯度和第二高度。
21、根據本發明的一個實施例,根據所述第一衛導輸出位置、第一航位推算位置、所述起點相對于所述起點中的第一個起點的第一行駛路程、第二衛導輸出位置、第二航位推算位置和所述終點相對于所述起點中的所述第一個起點的第二行駛路程,獲取所述終點的真實位移矢量、航位推算位移矢量、行駛里程和高程誤差;
22、根據所述真實位移矢量、航位推算位移矢量、行駛里程和所述高程誤差獲取所述第一里程計參數;所述第一里程計參數包括標度因數誤差、航向安裝偏角誤差和俯仰安裝偏角誤差。
23、根據本發明的一個實施例,所述預設里程計參數包括預設標度因數、預設航向安裝偏角和預設俯仰安裝偏角;
24、根據所述標度因數誤差、航向安裝偏角誤差、俯仰安裝偏角誤差、預設標度因數、預設航向安裝偏角和所述預設俯仰安裝偏角獲取第二里程計參數;
25、所述第二里程計參數包括推算標度因數、推算航向安裝偏角和推算俯仰安裝偏角。
26、根據本發明的一個實施例,所述第二里程計參數與所述預設里程計參數之間的變化量小于預設范圍包括:
27、所述第二里程計參數中的所述推算標度因數與所述預設里程計參數中的所述預設標度因數的變化量小于預設范圍。
28、根據本發明的一個實施例,根據所述第二里程計參數與所述預設里程計參數之間的變化量在預設范圍內之后,當所述起點有i個,且i>1時,其中i為自然數,獲取所述載體位于所述終點時相對于i個所述起點分別具有的第二里程計參數,將i個所述第二里程計參數進行累加均化處理,獲得目標里程計參數。
29、根據本發明的一個實施例,當所述起點有i個,所述終點有j個,且i>1和j>1時,其中i和j為自然數,分別獲取所述載體位于j個所述終點時相對于i個所述起點分別具有的第二里程計參數,將j個所述終點分別具有的i個所述第二里程計參數進行累加均化處理,獲得目標里程計參數。
30、根據本發明的一個實施例,所述第二里程計參數進行累加均化處理包括:
31、將所述推算標度因數進行標定結果累加,獲得所述目標里程計參數中的目標標度因數;
32、將所述推算航向安裝偏角進行標定結果累加,獲得所述目標里程計參數中的目標航向安裝偏角;
33、將所述推算俯仰安裝偏角進行標定結果累加,獲得所述目標里程計參數中的目標俯仰安裝偏角。
34、根據本發明的第二方面,本發明提供一種存儲介質,其上存儲有計算機程序,所述計算機程序被處理器執行時實現上述方法的步驟。
35、本發明具有以下有益效果:
36、本發明通過設計合理的載體的起點和終點,采用預設范圍判定及統計計算方式實現穩定可靠的里程計參數在線標定,同時可自動更新及存儲最新的標定結果,避免標定方案需標志點或濾波方法需載體機動及避免模型不準確和外部信息不準確的問題,通過本發明里程計參數標方法,標定方法簡單,容易實現,不僅可以提高了標定結果精確度,還提高工作效率。
技術特征:
1.一種里程計參數在線標定方法,其特征在于,包括如下步驟:
2.根據權利要求1所述的一種里程計參數在線標定方法,其特征在于,所述載體在所述第一里程中有i個起點,其中i為自然數,i≥1;
3.根據權利要求2所述的一種里程計參數在線標定方法,其特征在于,i個所述起點中,相鄰的所述起點之間相隔的里程為c1;j個所述終點中,相鄰的所述終點之間相隔的里程為c2;
4.根據權利要求3所述的一種里程計參數在線標定方法,其特征在于,根據所述載體相對于所述第一里程中的最后一個起點再行駛里程為c3,獲得所述第二里程中的第一個終點;
5.根據權利要求1所述的一種里程計參數在線標定方法,其特征在于,所述衛導輸出位置包括第一經度、第一緯度和第一高度;所述航位推算位置包括第二經度、第二緯度和第二高度。
6.根據權利要求5所述的一種里程計參數在線標定方法,其特征在于,根據所述第一衛導輸出位置、第一航位推算位置、所述起點相對于所述起點中的第一個起點的第一行駛路程、第二衛導輸出位置、第二航位推算位置和所述終點相對于所述起點中的所述第一個起點的第二行駛路程,獲取所述終點的真實位移矢量、航位推算位移矢量、行駛里程和高程誤差;
7.根據權利要求6所述的一種里程計參數在線標定方法,其特征在于,所述預設里程計參數包括預設標度因數、預設航向安裝偏角和預設俯仰安裝偏角;
8.根據權利要求7所述的一種里程計參數在線標定方法,其特征在于,所述第二里程計參數與所述預設里程計參數之間的變化量小于預設范圍包括:
9.根據權利要求1所述的一種里程計參數在線標定方法,其特征在于,根據所述第二里程計參數與所述預設里程計參數之間的變化量在預設范圍內之后,當所述起點有i個,且i>1時,其中i為自然數,獲取所述載體位于所述終點時相對于i個所述起點分別具有的第二里程計參數,將i個所述第二里程計參數進行累加均化處理,獲得目標里程計參數。
10.根據權利要求1所述的一種里程計參數在線標定方法,其特征在于,根據所述第二里程計參數與所述預設里程計參數之間的變化量在預設范圍內之后,當所述起點有i個,所述終點有j個,且i>1和j>1時,其中i和j為自然數,分別獲取所述載體位于j個所述終點時相對于i個所述起點分別具有的第二里程計參數,將j個所述終點分別具有的i個所述第二里程計參數進行累加均化處理,獲得目標里程計參數。
11.根據權利要求9或10所述的一種里程計參數在線標定方法,其特征在于,所述第二里程計參數進行累加均化處理包括:
12.一種存儲介質,其上存儲有計算機程序,其特征在于,所述計算機程序被處理器執行時實現權利要求1-11中任一項所述方法的步驟。
技術總結
本發明涉及測量技術領域,具體而言,涉及一種里程計參數在線標定方法及存儲介質。標定方法包括根據載體在行駛第一里程中的位置作為起點,將載體在行駛第二里程中的位置作為終點,第二里程為載體在行駛第一里程的基礎上再行駛的里程;獲取載體在起點的第一位置信息;獲取載體在終點的第二位置信息;根據第一位置信息和第二位置信息獲取載體的第一里程計參數;根據載體的預設里程計參數和第一里程計參數獲取載體的第二里程計參數;根據第二里程計參數與預設里程計參數之間的變化量在預設范圍內,獲得載體的目標里程計參數。本發明方法簡單,容易實現,通過本發明方法提高了里程計參數標定結果精確度。
技術研發人員:賈勇,歐立靜,楊景輝,蒲秀華,張先全,饒興橋
受保護的技術使用者:貴州航天控制技術有限公司
技術研發日:
技術公布日:2025/4/28
- 還沒有人留言評論。精彩留言會獲得點贊!